SplaTAM ubuntu配置与运行记录
- 1. 资料收集
- 2. 环境配置与运行注意问题
- 3. 在线运行
近期各种定会涌现出一种新的基于高斯的方法,备受关注,这里我们也来学习下sota效果的slam用于定位和重建。
1. 资料收集
- coda link
- 3D Gaussians
2.1 Dynamic 3D Gaussians
2.2 3D Gaussian Splating - Baselines
3.1 Nice-SLAM 详细见link
3.2 Point-SLAM
2. 环境配置与运行注意问题
由于笔者已经安装好了 nvidia 驱动 ,conda 和 nvcc 基础环境和网络已经配置完成。
这个过程有几个问题需要格外注意:
- 工程中有个diff-gaussian-rasterization-w-depth.git文件,最好手动下载后将内容拷贝到这个目录下;
- 数据集最好单独下载,文件太大,和nice-slam很多数据可以公用,直接修改config文件下的basedir变量即可
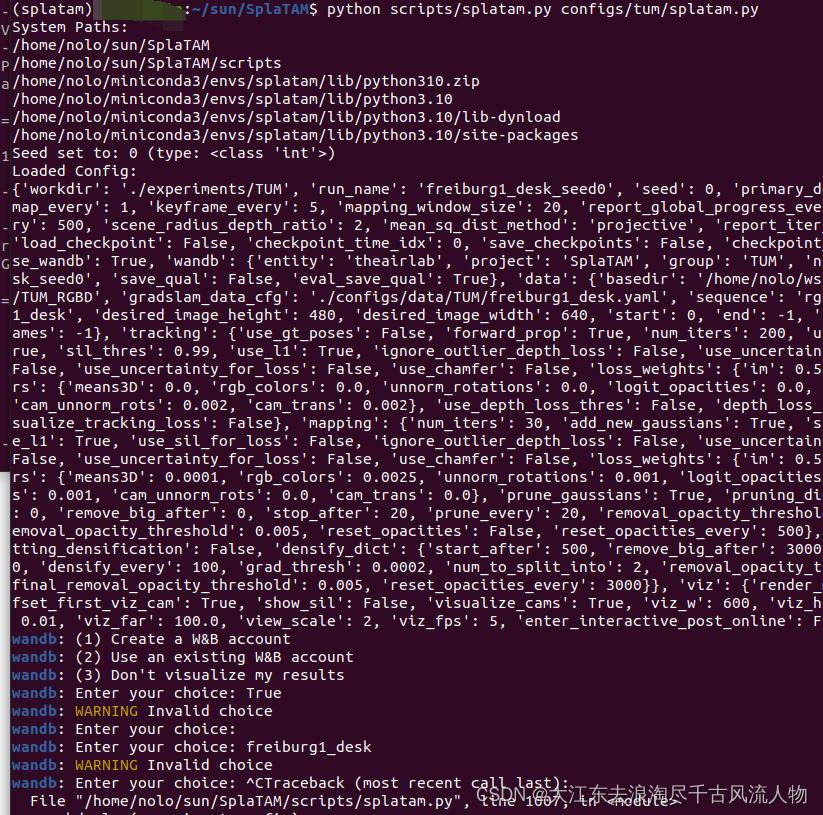
- 直接运行 会问你 wandb API_KEY 相关问题,我直接把 configs/tum/splatam.py 文件里的 use_wandb = True 改成了 False 就 OK啦。
- 运行的时候会训练挺久,至少肯定不实时,耐心等待,我这里。
训练指令
~/sun/SplaTAM$ python scripts/splatam.py configs/tum/splatam.py
不知道过了多久 ,第二天过来,训练完成。

- 对于数据集运行结果,可以用
python viz_scripts/final_recon.py configs/iphone/splatam.py

6.可视化,iphone 换成 tum。
3. 在线运行
这里笔者没有运行,参考坐着展示的结果如下:











)


)

)

—— Kubernetes 之 自动伸缩 HPA、VPA、CA和CPA详解)

时用到UV胶水?)