Stereolabs 的 ZED Box 是一款由 NVIDIA® Jetson™ 提供支持的紧凑型网关,用于在移动和现场情况下挑战 AIoT(物联网)。它旨在将空间感知和理解带到边缘,并聚合、处理和分析来自 3D 传感器和设备的数据。
相关内容
1.win10下 + cuda10.2 + 双目相机zed 2i sdk的安装
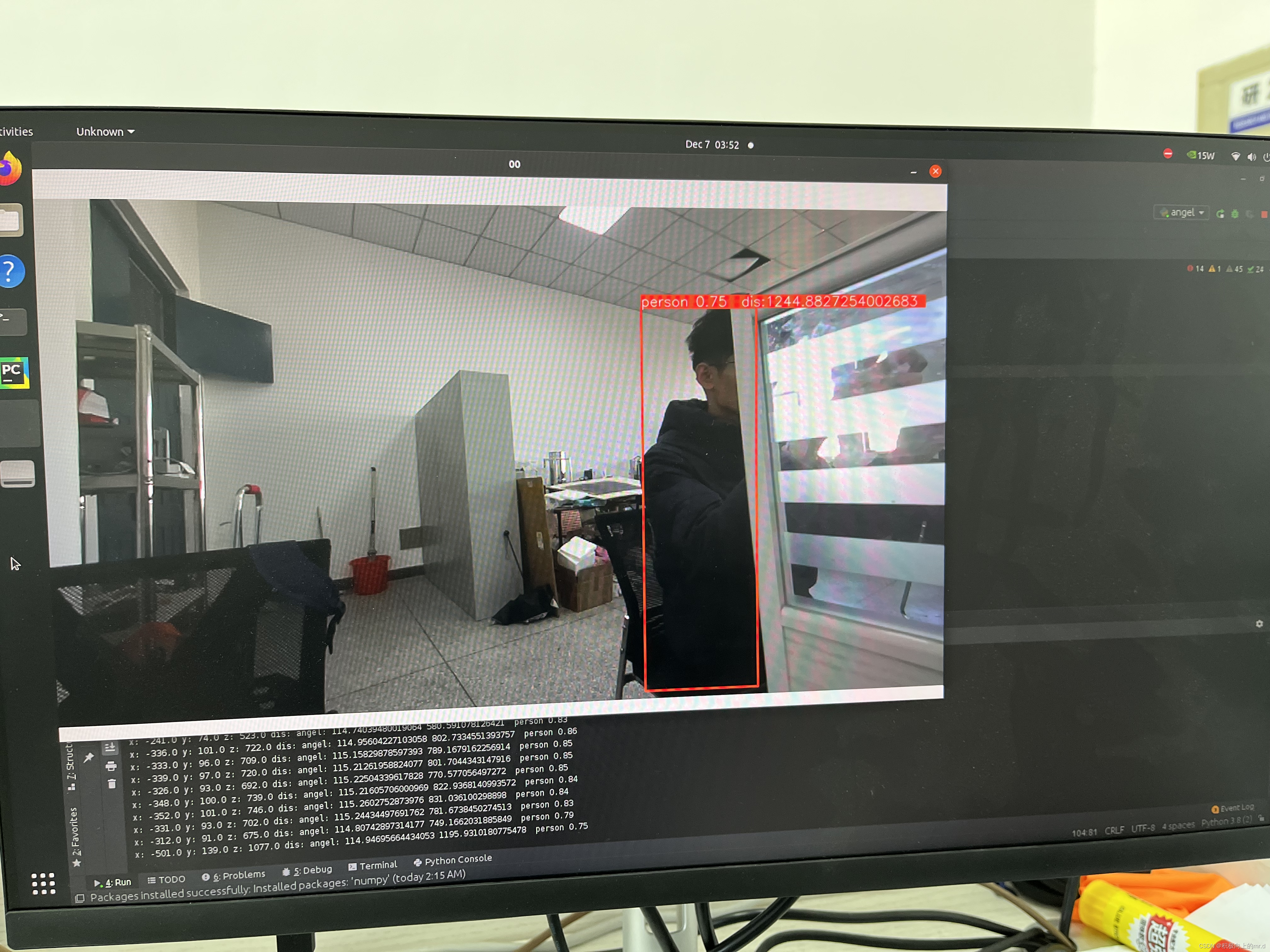
2.yolov5直接调用zed相机实现三维测距
1. 相关配置
设备:ZED Box Orin NX 16G
python==3.8
Ubuntu系统
2. 安装硬件和cuda
插上电源,将zedbox与显示屏通过HDMI线连接,同时将鼠标键盘以及相机插入zedbox的USB接口上,相关硬件连接步骤看不懂的可见官网连接图

官网显示需要安装sdkmanager,具体可参考orin nano烧录系统,但在这里没有安装,可能是系统默认装上了,直接进行了验证jtop步骤
sudo -H pip install -U jetson-stats
sudo systemctl restart jtop.service
sudo jtop
验证完之后会出现一个界面,此时需要重启电脑,然后输入以下命令配置cuda
1.打开文档
sudo gedit ~/.bashrc
2.在文档末尾添加一下代码并保存
export CUDA_HOME=/usr/local/cuda-11.4
export LD_LIBRARY_PATH=/usr/local/cuda-11.4/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda-11.4/bin:$PATH
3.保存并查看配置
source ~/.bashrc
nvcc -V #如果配置成功可查看CUDA的版本号
此时cuda的配置就算完成了
3. 下载SDK
查看自己的jetson适用的SDK版本并下载,下载后得到一个名为 ZED_SDK_Tegra_L4T35.3_v4.0.8.zstd.run 的软件,打开终端,输入以下命令进行配置(相关模型不想下载可以选择否)
./ZED_SDK_Tegra_L4T35.3_v4.0.8.zstd.run

配置完成之后,在终端输入import pyzed as sl,如果不报错就代表通过了,如果报错,打开目录为 cd /usr/local/zed这个文件夹,终端运行
python get_python_api.py
如果上述不报错,直接打开目录为 cd /usr/local/zed/tools这个文件夹,执行命令
./Zed_Diagnostic
运行如果都没有问题就代表通过了
4. 运行代码
此时可以下载相关的库,之后运行yolov5直接调用zed相机实现三维测距代码,实现测距
5. 重置
由于在中途遇到过显示屏持续显示无HDMI的问题,但HDMI检查无错误,故进行重置
重置需要准备一个30GB空间的Ubuntu电脑
1.关闭设备电源。
2.将微型 USB 电缆连接到执行升级/重置的主机 PC。
3.将电缆连接到标记为 的设备的微型 USB 端口。OTG
4.打开设备电源
然后输入以下命令
lsusb -d '0955:'
会出现带有 VID:PID 的设备0955:7323的信息
然后下载脚本,并在终端执行命令
BSP_ROOT=./stereolabs_bsp/ ./zedbox_onx_usb_flash.sh
执行大概半小时后,成功刷机,如果失败,请检查ubuntu磁盘空间是否充足,otg接口是否插在USB3.0电脑接口处
后续内容会慢慢补充,欢迎有问题留言






揭秘)

![微信小程序动态加载图表[echart]](http://pic.xiahunao.cn/微信小程序动态加载图表[echart])




)
,增强为真实批量插入)




