一、安装机械手软件

如图所示,安装顺序为:先安装第一个,再安装第二个
二、快速认识学习掌握机械手软件重要功能
1.连接机械手
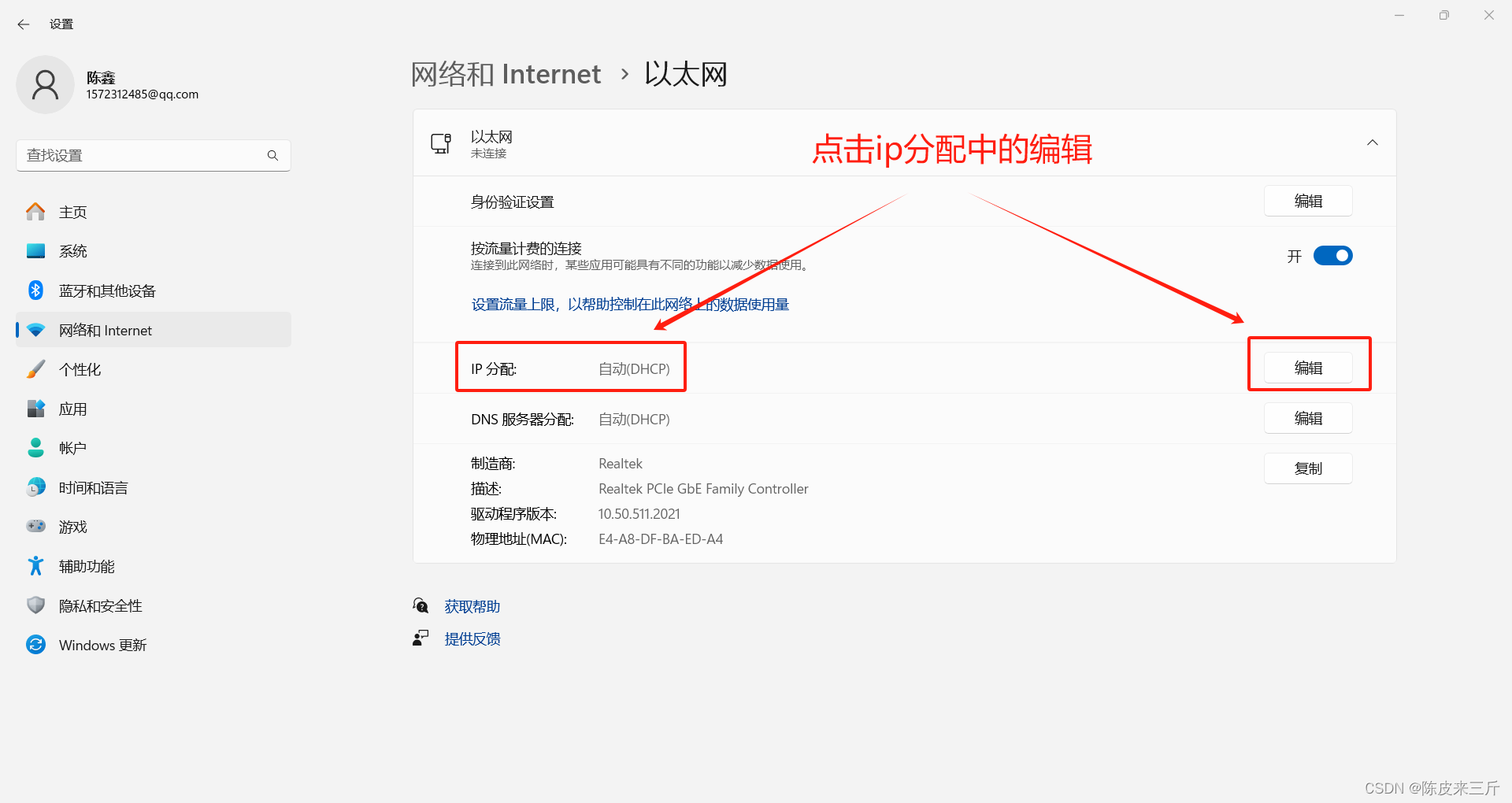
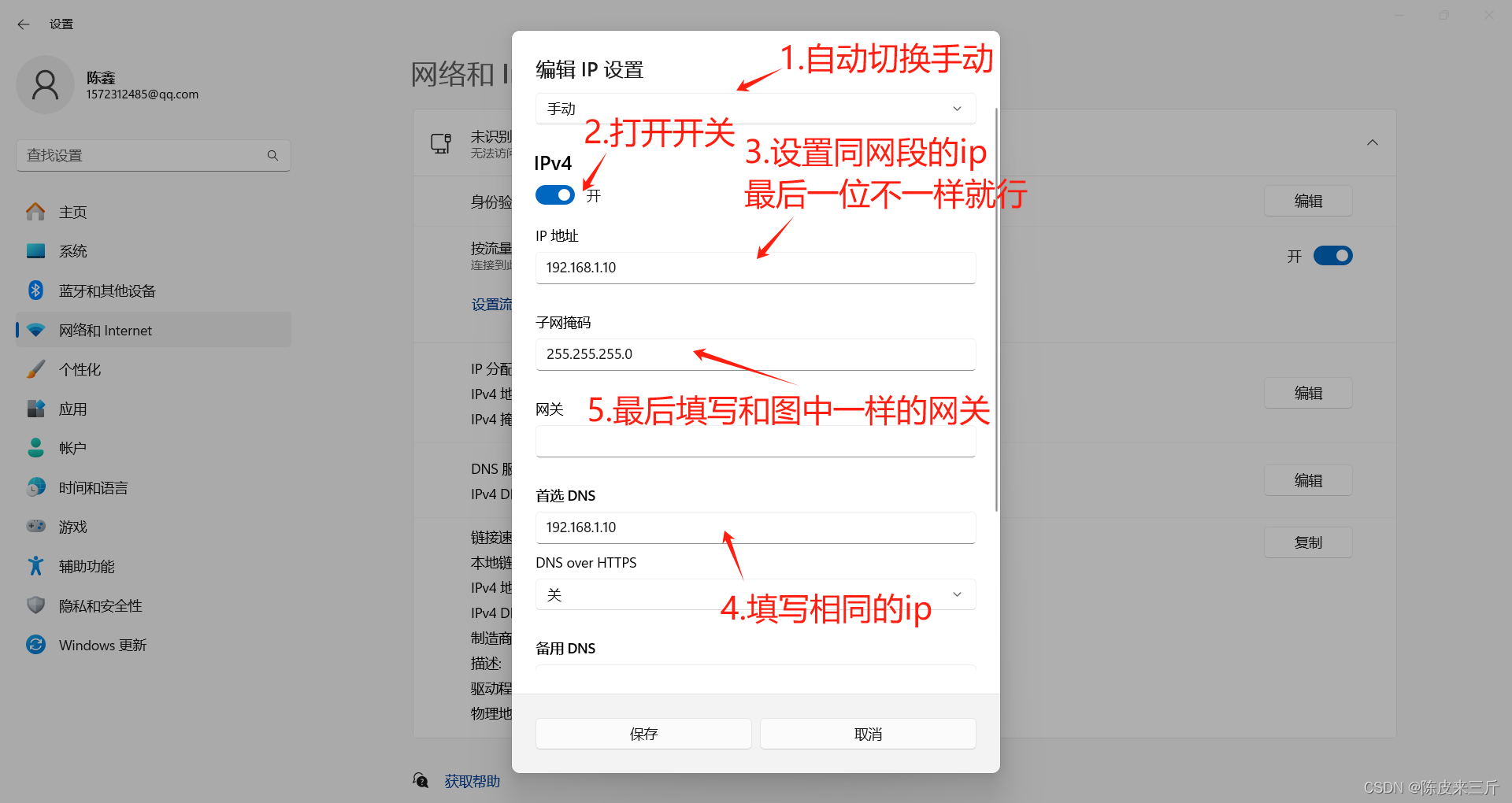
机械手默认出厂的ip为:“192.168.1.1”,在初次连接机械手前,必须把使用连接的电脑修改同一网段,以win11操作系统为例,操作如下
修改完电脑ip后,打开机械手软件,连接机械手,上述提过,机械手默认ip为:“192.168.1.1”,连接方法如图: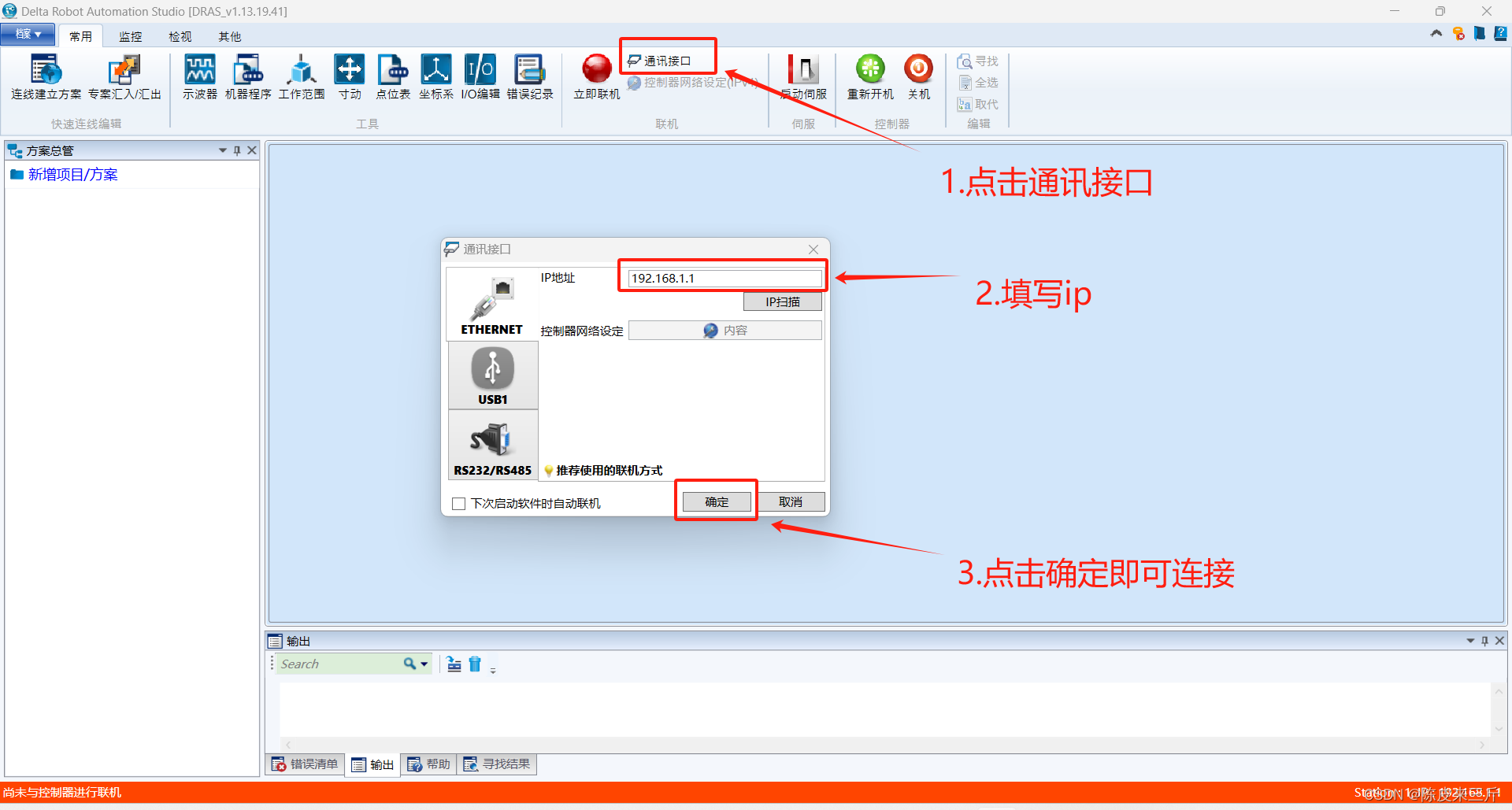
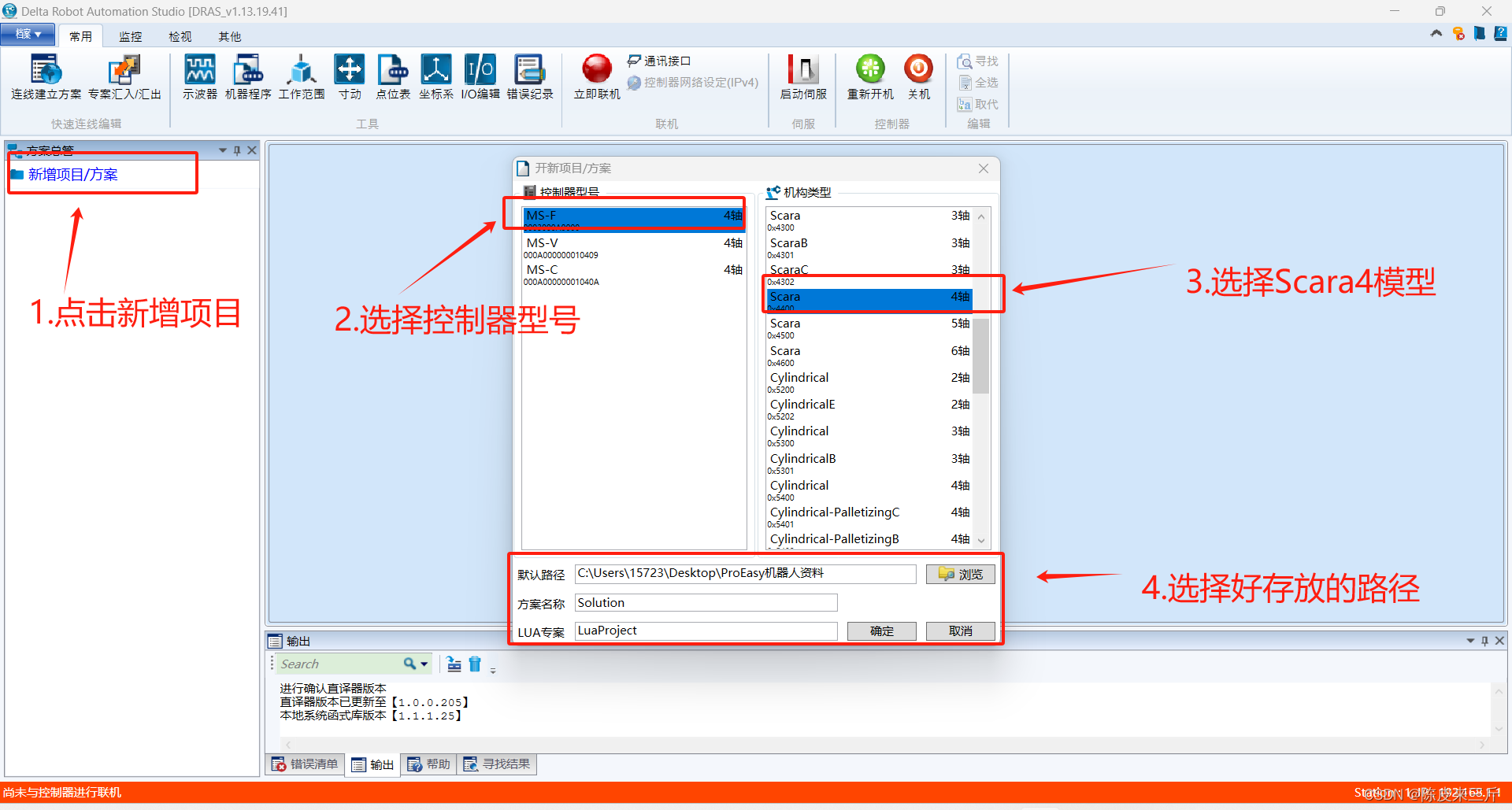
2.项目建立
连接好机械手之后,先建立一个新项目,如图
项目创建好之后就是如图下所示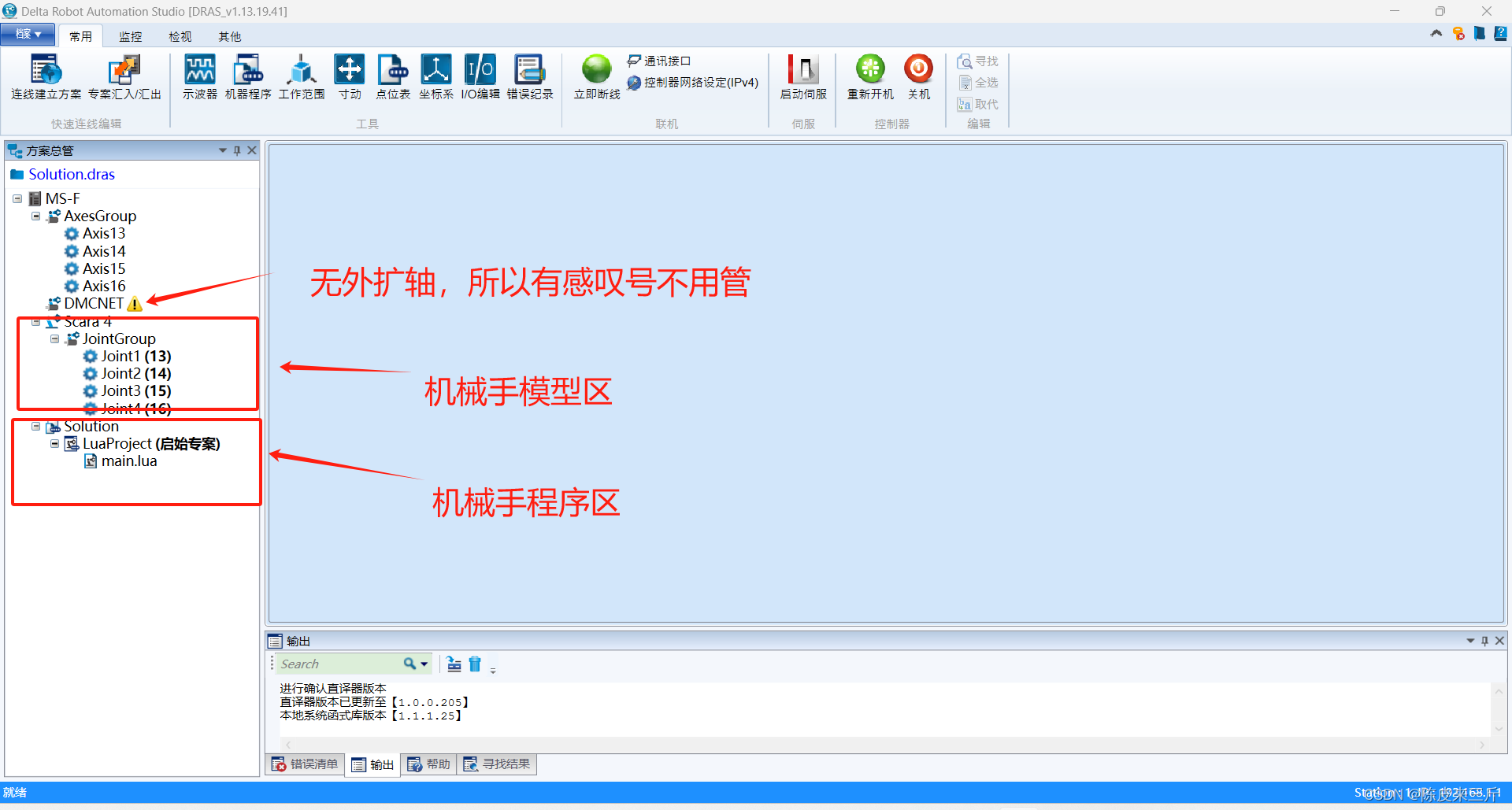
3.机械手寸动与点位表
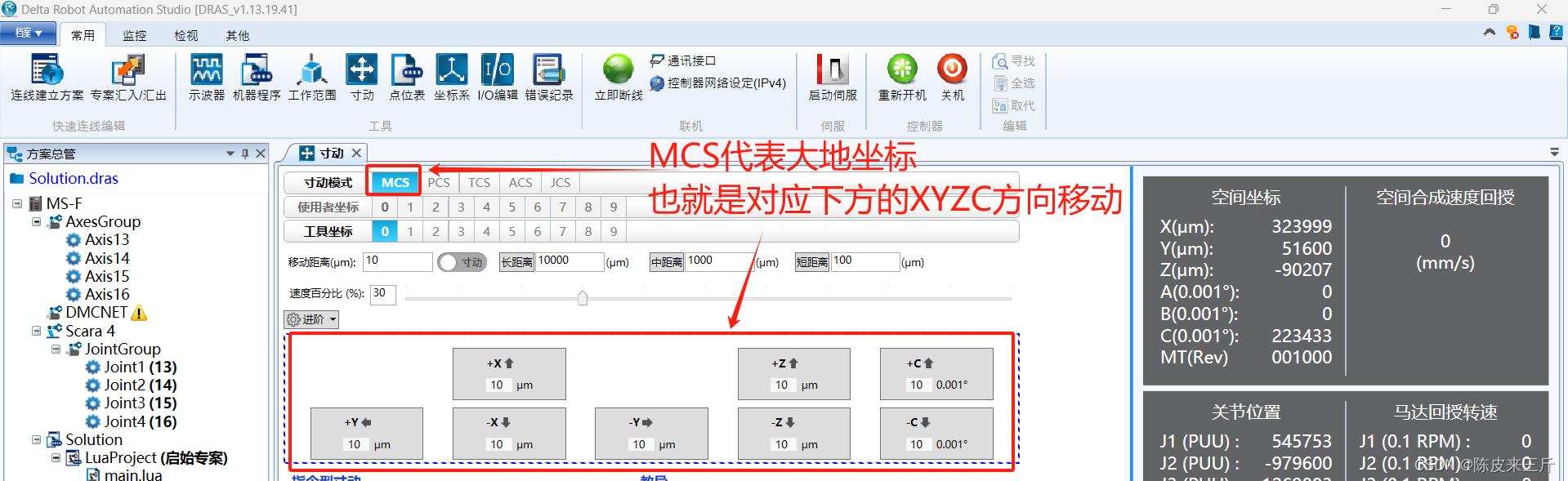
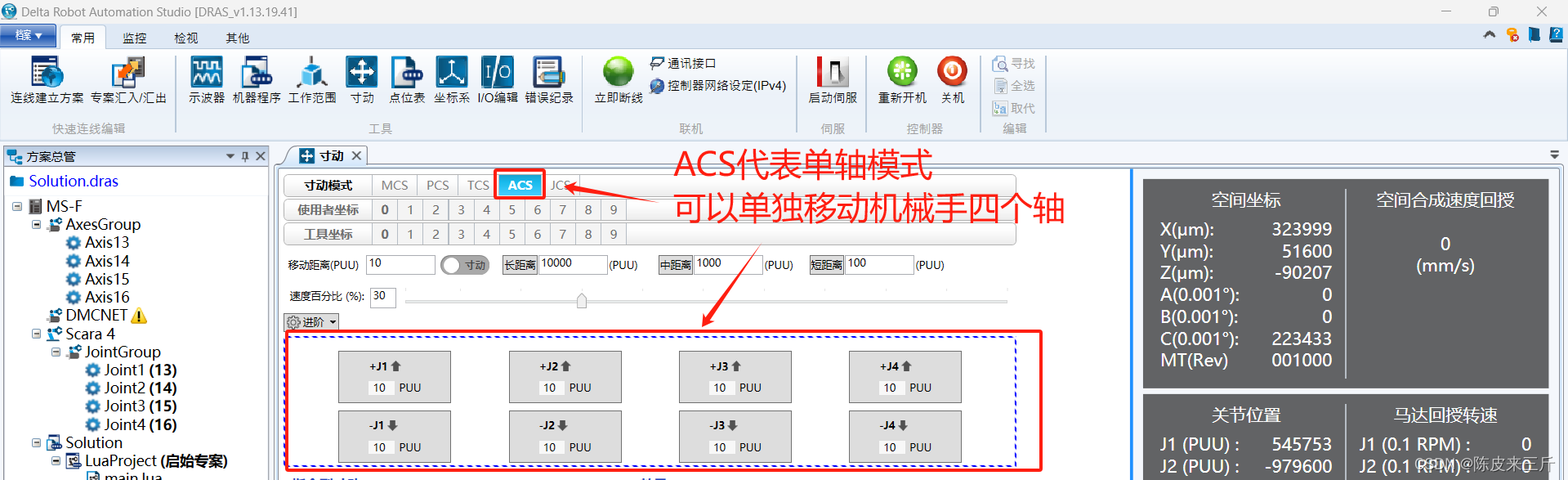
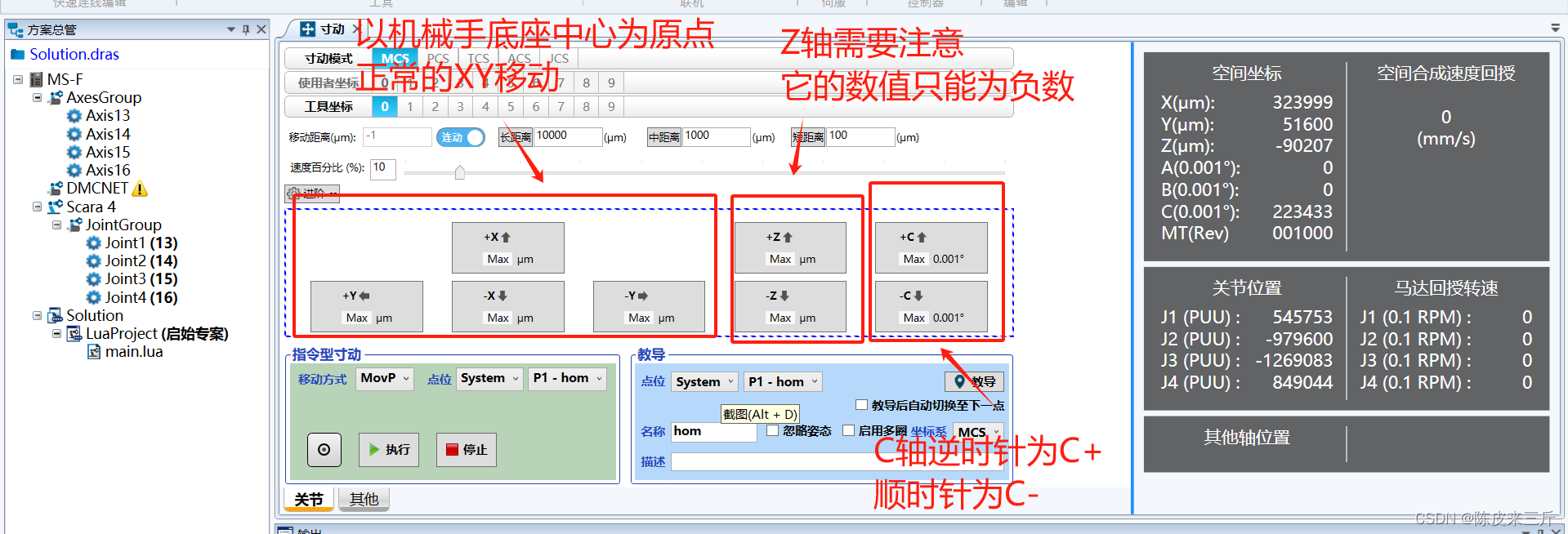
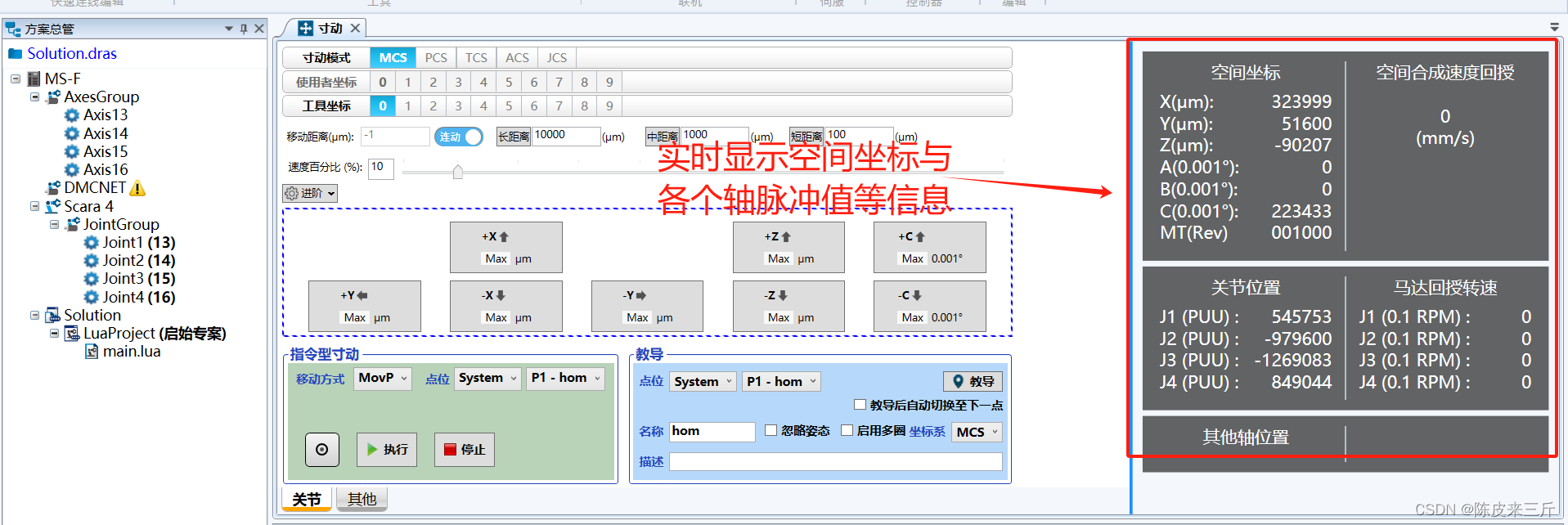
寸动功能就是用软件手动移动机械手的XYZC空间坐标,并保存相对应的工作点位,以及移动到已保存的点位,如图


上面详细介绍了能够寸动机械手的功能说明,现在我们尝试寸动机械手,以当前的位置保存到1号点,保存功能如图
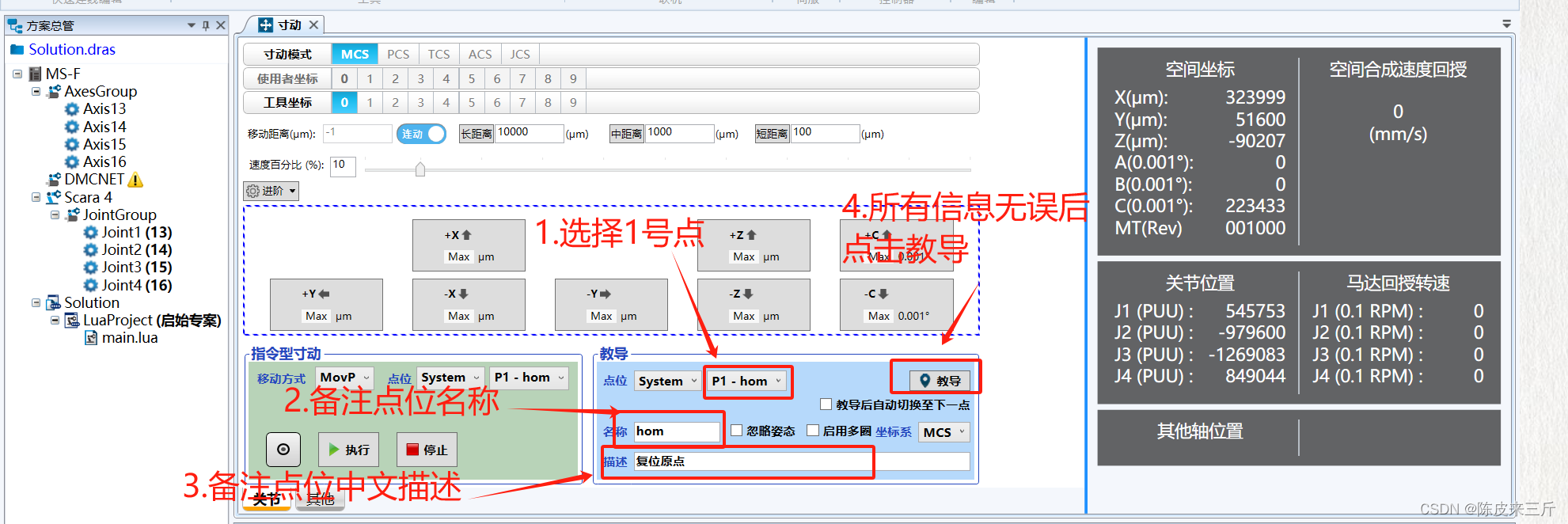
系统提供的点位数量总共有1024个点,点位的名称与中文描述可以选择不填写,只需要选择好对应的点位编号就行
在保存诸多个点位之后,如果想复查一下之前保存的点位的位置是否正确,就可以使用指令型寸动的功能,总共有四种运动轨迹可以到达目标点,如图
需要注意,MovP/MovL都是XYCZ四个轴同时运动,在移动的过程中谨防撞到其他机构或障碍物,MovArchP/MovArchL指令移动之前,得需要设置拱形的最高位置,这个位置数据也就是机械手绝对位置,如图,以MovArchP为例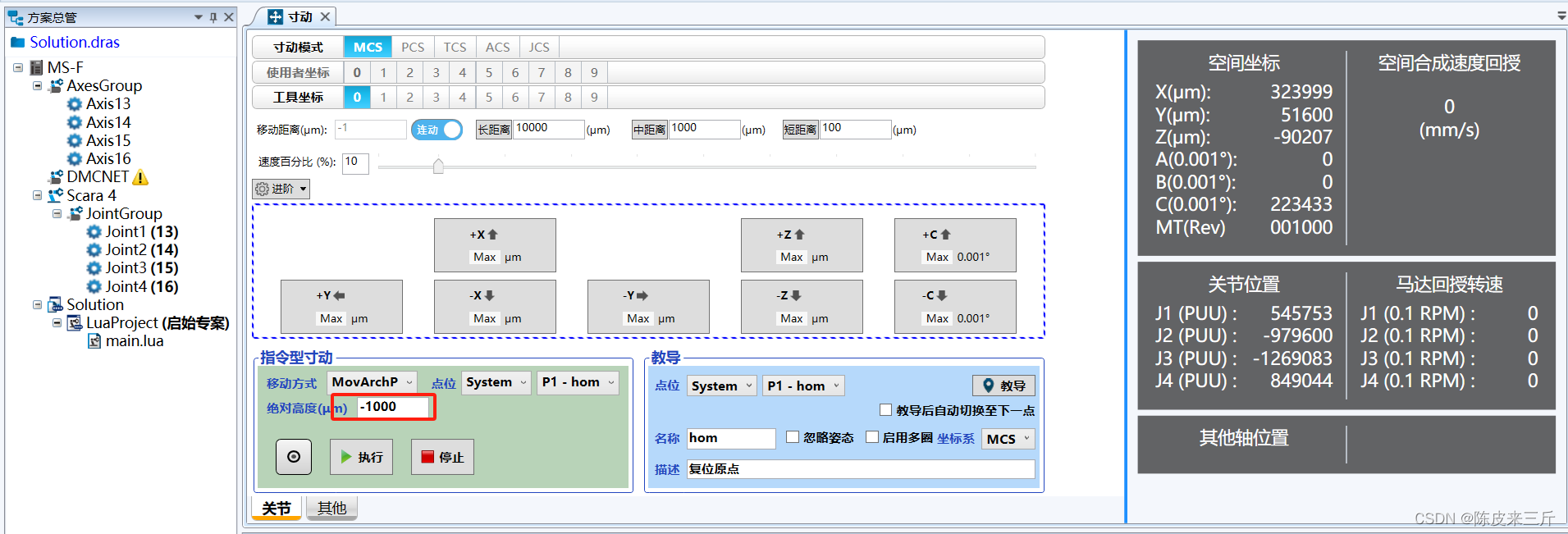
上图中-1000(单位um),也就是机械手在移动的时候,先Z轴抬高到-1000um的位置,然后弧形移动到目标点-1000um的上方,最后轴下降到目标点示教的高度,这个移动的轨迹和拱形一样,所以就叫拱形移动
选择好移动指令之后,就开始选择要移动的目标点编号,然后点击移动开关,如图
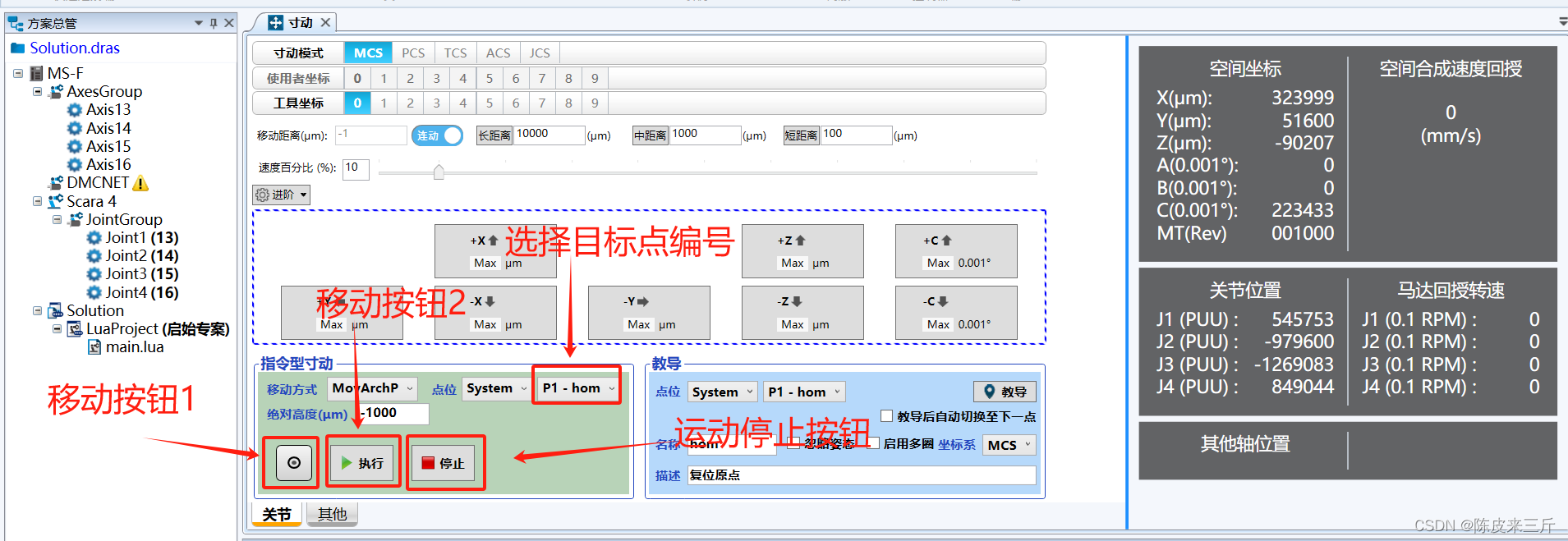
移动按钮1:鼠标左键长按时机械手移动,松开机械手停止,推荐大家在移动过程中使用此按钮,在机械手过程中如果快要撞机,就可以松开按钮,大大减少撞机风险
移动按钮2:鼠标左键点击一下,机械手直接执行完全部移动过程,不建议新手使用
运动停止按钮:经常搭配移动按钮2使用,谨防移动过过程中撞机,点击直接停止机械手移动动作
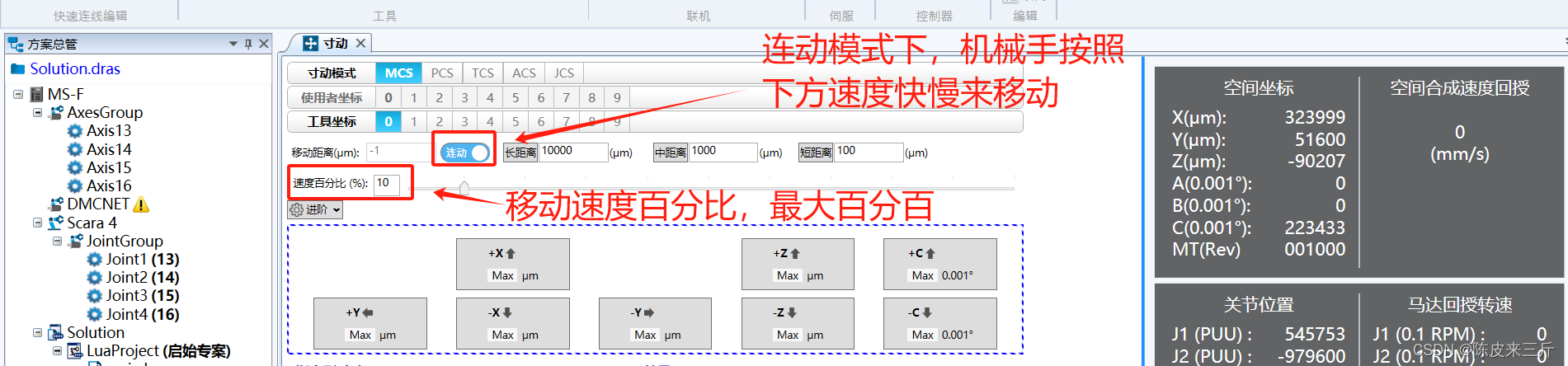
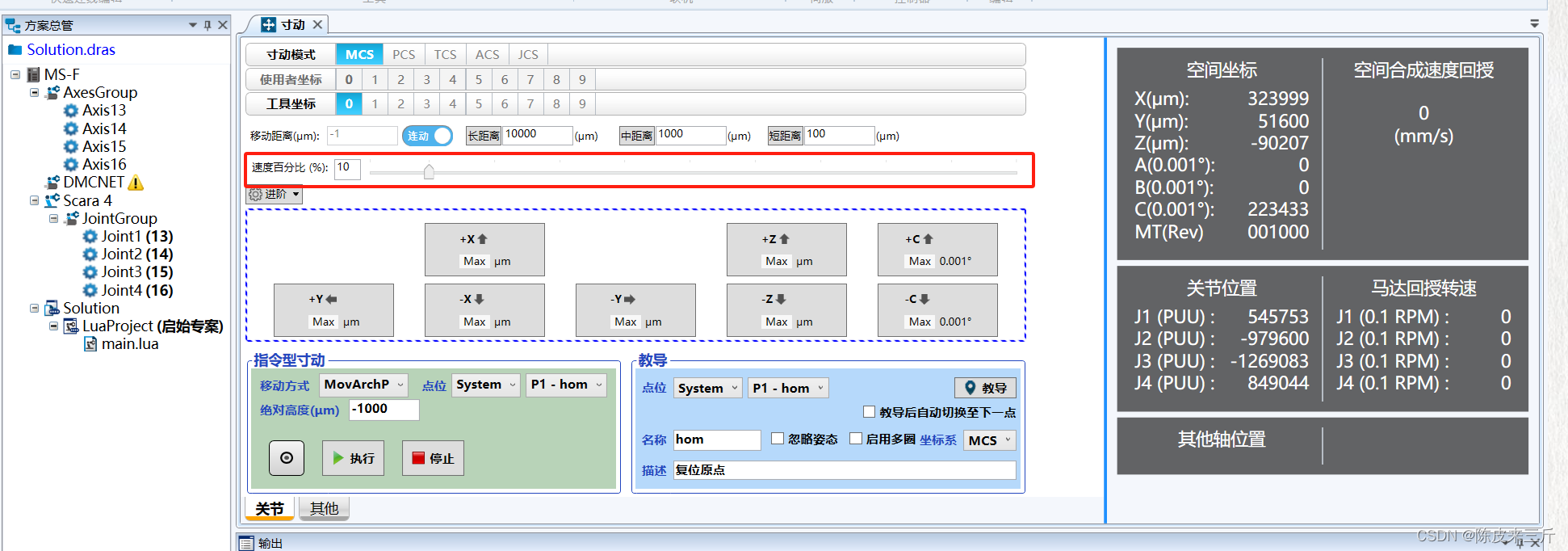
最后四个指令的移动速度也可以直接去点击上方速度百分比的滑动开关,如图
点位表是记录每个点XYZC或单轴的数据与机械手其他数据,如图
持续更新中.............................








)

)



:基础关系图实现)




:空间自相关示例)