需求痛点:建筑行业是一个安全事故多发的行业。目前,工程建设规模不断扩大,工艺流程纷繁复杂,如何搞好现场施工现场管理,控制事故发生频率,一直是施工企业、政府管理部门关注的焦点。利用现代科技,优化监控手段,实现实时的、全过程的、不间断的安全监管也成了建筑行业安全施工管理亟待考虑的问题。
解决方案:建筑工地利用信息化技术,优化监控手段,实现实时、全过程、不间断的安全监管,对特种设备等容易发生危险的人、财、物等进行科学监控和信息化管理。

一、绿色施工——环境与能耗
需求痛点:施工现场的扬尘、噪声、污水排放的监测工作存在周期长、数据量大的特点,传统方式依靠人工测量,耗费人力,工作效率低,记录的数据缺乏客观性及说服力。
解决方案:实现工地现场环境和用电能耗的监测,其中环境监测与除尘设备相连接,当扬尘监测超过标准后,则自动启动除尘设备。

二、高效施工——进度管控
需求痛点:工程占地面积大,各工序交叉作业多,现场可用场地小,不能合理划分施工段,对施工进度难以掌控。
解决方案:通过信息化的手段,结合相应的智能设备对施工进度进行实时掌控。建筑工地施工进度管理模块由施工计划管理、工程整改记录、资料管理、进度巡检记录等功能模块组成。

三、文明施工——劳务管理
需求痛点:施工队伍流动性大,现场人员随意进出;工人身份难以验证;工人出勤缺乏电子记录,工资核算与支付证据链不清,劳资纠纷频繁发生。
解决方案:对工地劳务情况进行统一管理,其包括实名制考勤管理、劳务黑名单管理、劳动力工种统计及工地制度管理。

四、智慧工地建设效益
1.为政府决策提供科学依据:基于智慧工地平台全天候、全时段的不间断监测,能够实现异常情况及时预测预警。同时,进行智能预测预警,及时发现隐患,指导相关处理工作,为政府管理决策提供科学的依据,避免重大安全事故的发生。
2. 促使企业转型升级:构建智慧工地安全监管平台,将云计算、物联网、大数据、智能设备等先进现代化技术运用到施工现场各项管理中,从而实现政府、企业、施工部门之间的信息资源共享,促进建筑企业的转型升级。
3.多方共赢:智慧工地平台可提供施工实时监控,保障现场施工安全;实现对施工进度以及人员考勤等功能,源头上有效解决农民工讨薪纠纷,维护农民工的合法权益。

五、技术说明
❀微服务架构+Java+Spring Cloud +UniApp +MySql
❀支持多端展示(PC端、手机端、平板端);
❀数字孪生可视化大屏,一张图掌握项目整体情况;
❀使用轻量化模型,部署三维可视化管理,与一线生产过程相融合,集成数据后台,统一前端入口,呈现多方项目信息;
❀用户PC端、移动端数据同步,依托组件化开发平台。;
❀依托数据交互子平台,形成用户多系统间数据融合;
❀依托智慧工地平台,满足省、市级住建数据监管要求;
❀利用5G及智能终端算法,实现IOT设备数据抓取与处理。
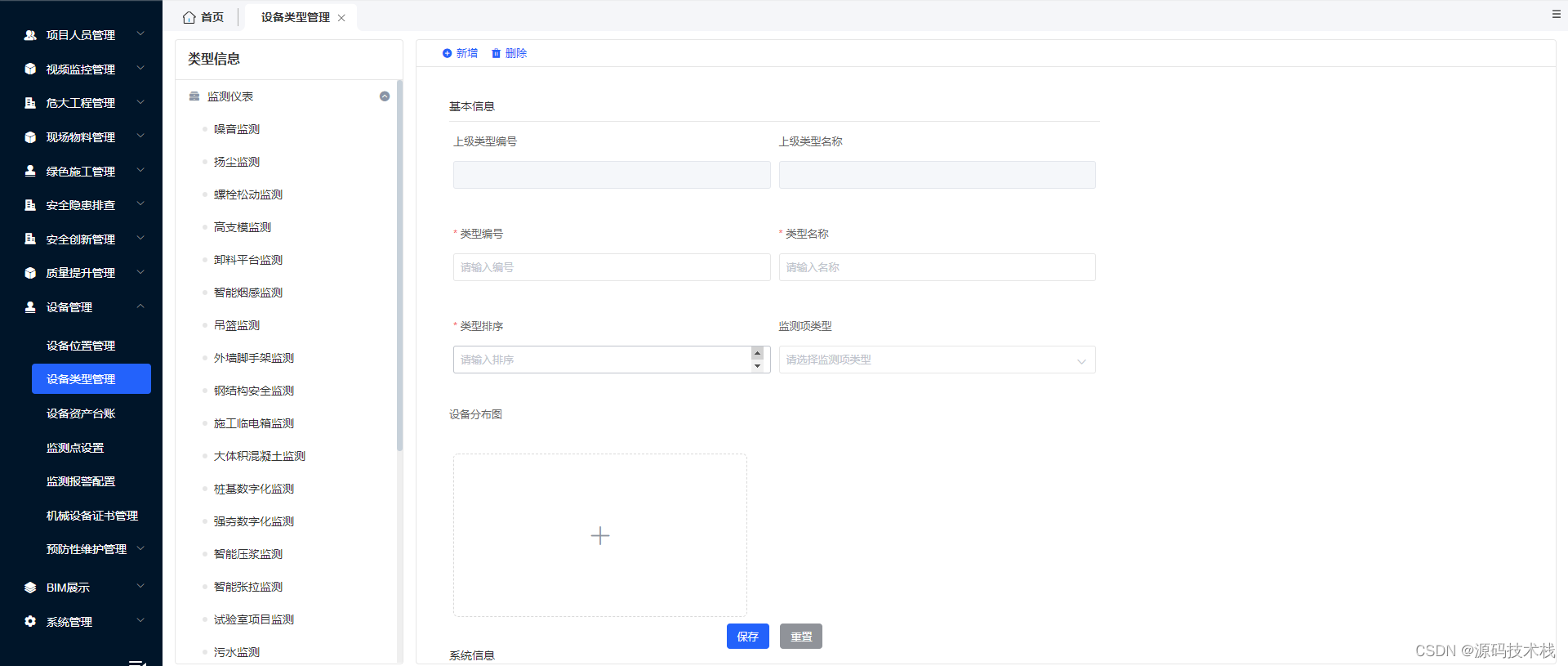
六、系统功能介绍
【项目人员管理】
1. 项目管理:项目名称、施工单位名称、项目地址、项目地址、总造价、总面积、施工准可证、开工日期、计划竣工日期、项目状态等。
2. 人员信息管理:支持身份证及人脸信息采集;基础信息、证书信息、合同信息、培训信息等多项数据维护。
3. 考勤管理:支持安全帽,手机端等多种打卡方式,对人员进出场时间记录、工时统计;分区管理、考勤记录、工资发放。
4. 门禁管理:对特种人员及管理人员建立标签,方便人员查询,统一管理。
5. 安全教育:施工现场提供无线 WIFI,工人在上网前需要经过认证,回答内置试题,通过认证后方可上网,系统根据登录人员工种推送不同类型问题或视频内容,问题或视频根据重要程度设置不同权重,随机进行推送。

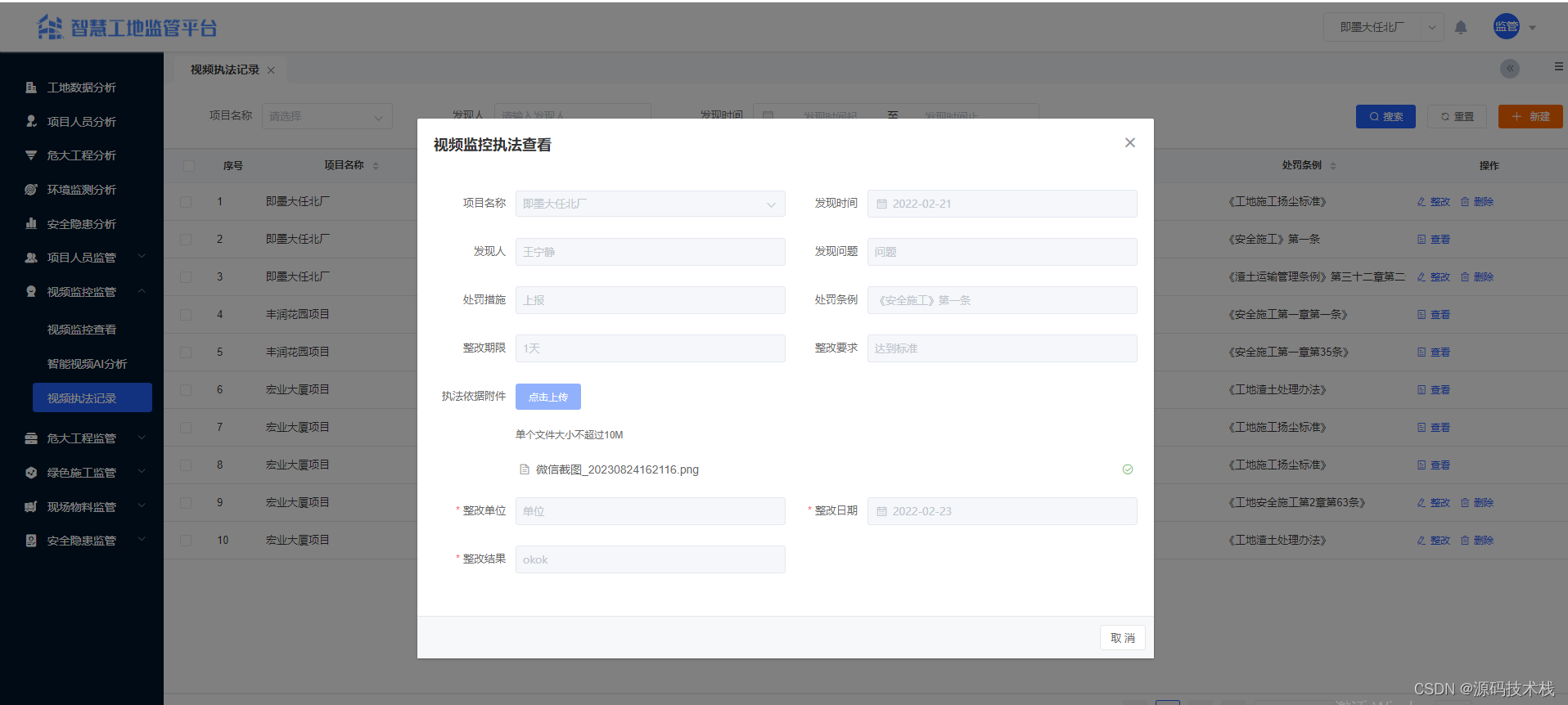
【视频监控管理】
视频监控查看、视频监控回放、AI危险源识别、AI应用总览。
通过视频监控+智能分析,判断主要出入口或特定场所是否佩戴安全帽。 当检测到未戴安全帽时立即报警,降低安全事故。可对重点区域部署徘徊监测功能,当发现有异常徘徊人员时主动触发报警。
【 危大工程管理】
1.机械、设备、司机识别:
所有塔机、升降机具备人脸或指纹等生物识别认证功能,确保人员持证上岗;司机信息实时上传至智慧工地平台。
2. 塔机监测:
能够对重要运行参数进行实时监视,包含重量、力矩、高度、幅度、回转角度、运行速度、风速;当塔机出现危险操作时,实时报警数据将推送至智慧工地平台。
3. 吊钩可视化:
可视化视频画面支持驾驶室、电脑端、手机端的实时观看,远程浏览;
4. 升降机运行监测:
实时监测载重、轿厢倾斜度、起升高度、运行速度等参数;出现异常时,轿厢内立即声光报警,并将报警数据推送至智慧工地平台。
5.高支模监测系统:
实时监测高支模立杆及倾斜角度、荷载,监测架体的水平位移以及模板沉降情况;当检测数据超过预警值时,实时报警并发送云平台。
6. 深基坑监测系统:
对深基坑的支护结构顶部水平位移、深层水平位移、立柱顶水平位移、沉降、支撑结构内力和锚索应力等数据实时监测,并对超警戒数据进行报警。

【绿色施工管理】
环境实时监测、环境监测历史数据、喷淋任务管理、自动喷漆记录、渣土车智能分析、车辆进出场记录
1.环境监测:
实时显示 PM2.5、PM10、温度、湿度、风速、风向、噪音数据;智慧工地平台可设置报警值、预警值,发生报警时能够及时推送预警信息。
2. 扬尘监测:
智慧工地平台可设置颗粒物指标预警值,当检测到颗粒物浓度超标后系统自动启动喷淋设备,实现自主降尘;手机端APP 具有远程控制功能。
3.车辆冲洗AI识别:
通过在工地的出入口安装渣土车车辆冲洗识别装置,自动识别出场的渣土车是否按照规定进行了充分的冲洗后再出场上路,对绕行、未冲洗和冲洗不充分的渣土车进行报警信息和视频证据上报。
4.水电监测:
基于物联网技术的水电计量新模式,自动远程读取水、电表数据,设置阈值,自动判断异常情况。
【现场物料管理】
车牌识别、自动称重、智能物料称重、语音播报、见证取样监测、现场检测检验、物料进场、物料退场等。
【安全隐患排查】
可在电脑端、手机端对安全隐患数据进行记录、查询;实现安全隐患发起、整改、复查的闭环管理;具备对安全隐患数据进行统计、可视化分析、信息推送等;包含对危险性较大的分部分项工程进行巡查记录功能 。

![[Python程序打包: 使用PyInstaller制作单文件exe以及打包GUI程序详解]](https://img-blog.csdnimg.cn/44a82c678d4f4444b617005e86de3e91.png)