目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
4.1、YOLOv2网络原理
4.2、基于YOLOv2的打电话行为检测
5.算法完整程序工程
1.算法运行效果图预览



2.算法运行软件版本
matlab2022a
3.部分核心程序
................................................................................
% 加载预训练的 ResNet-50 模型
load Model_resnet50.mat% 用于目标检测的特征层
featureLayer = 'activation_40_relu';
% 构建 YOLOv2 网络
lgraph = yolov2Layers(image_size,num_classes,anchor_boxes,Initial_nn,featureLayer);options = trainingOptions('sgdm', ...'MiniBatchSize', 8, ....'InitialLearnRate',1e-3, ...'MaxEpochs',100,...'CheckpointPath', checkpoint_folder, ...'Shuffle','every-epoch', ...'ExecutionEnvironment', 'gpu');% 设置训练选项
% 训练 YOLOv2 目标检测器
[detector,info] = trainYOLOv2ObjectDetector(train_data,lgraph,options);
save yolov2.mat detector
864.算法理论概述
打电话行为是一种常见的日常行为,但在某些场合下,如驾驶、会议等,打电话行为可能会带来安全隐患或影响工作效率。因此,研究一种能够实时检测打电话行为的方法具有重要意义。传统的打电话行为检测方法主要基于传感器或图像处理技术,但存在精度低、实时性差等问题。
4.1、YOLOv2网络原理
近年来,深度学习技术在目标检测领域取得了显著进展。其中,YOLO系列算法是一种基于深度学习的实时目标检测算法,具有速度快、精度高等优点。YOLOv2是YOLO系列的第二代算法,相比于第一代算法,在速度和精度上都有所提升。此外,卷积神经网络(CNN)是深度学习中常用的模型之一,具有强大的特征提取能力。因此,本文选择YOLOv2和CNN作为打电话行为检测的基础算法和模型。
YOLOv2是一种实时目标检测算法,其核心思想是将目标检测任务看作一个回归问题,通过单次前向传播即可完成检测。相比于其他目标检测算法,YOLOv2具有更高的检测速度和较好的准确性。以下是YOLOv2网络的主要原理:
网络结构:YOLOv2采用Darknet-19作为基础网络,该网络由19个卷积层和5个最大池化层组成,具有较快的运算速度和较低的计算复杂度。
批量归一化(Batch Normalization):YOLOv2在网络中加入批量归一化层,减少内部协变量的移动,使网络更加稳定,加速收敛。
其基本结构如下所示: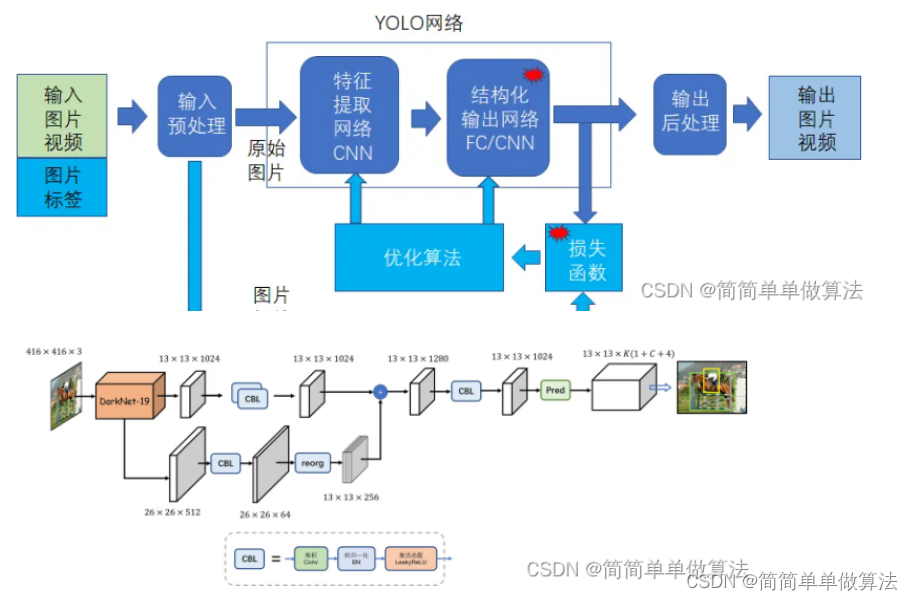
YOLOv2引入了多尺度训练方法,通过在网络输入端随机调整图像大小,提高网络对不同尺度目标的检测能力。
4.2、基于YOLOv2的打电话行为检测
本文提出的打电话行为检测方法主要分为两个阶段:训练阶段和检测阶段。在训练阶段,我们使用标注好的数据集对YOLOv2网络进行训练,使其能够识别出打电话行为。在检测阶段,我们使用训练好的YOLOv2网络对输入的视频帧进行检测,识别出其中的打电话行为。
具体来说,我们的方法包括以下几个步骤:
数据预处理:对标注好的数据集进行预处理,包括图像增强、归一化等操作,以提高模型的泛化能力。
网络构建:构建基于YOLOv2的深度学习网络,包括特征提取网络和检测网络两部分。特征提取网络采用卷积神经网络(CNN),用于提取输入图像的特征;检测网络采用YOLOv2算法,用于对提取的特征进行目标检测。
网络训练:使用标注好的数据集对网络进行训练,优化网络的参数,使其能够识别出打电话行为。在训练过程中,我们采用随机梯度下降(SGD)算法进行优化,并使用交叉验证方法对模型的性能进行评估。
行为检测:使用训练好的网络对输入的视频帧进行检测,识别出其中的打电话行为。具体来说,我们将视频帧输入到网络中,经过特征提取和目标检测两个步骤后,得到检测结果。如果检测结果中存在打电话行为的类别,则认为该帧中存在打电话行为。
5.算法完整程序工程
OOOOO
OOO
O









![[个人笔记] vCenter6.7使用自建SSL证书](http://pic.xiahunao.cn/[个人笔记] vCenter6.7使用自建SSL证书)





)



