文章目录
- 1. 导入相关库
- 2. 加载数据集
- 3. 整理数据集
- 4. 图像增广
- 5. 读取数据
- 6. 微调预训练模型
- 7. 定义损失函数和评价损失函数
- 9. 训练模型
1. 导入相关库
import os
import torch
import torchvision
from torch import nn
from d2l import torch as d2l
2. 加载数据集
- 该数据集是完整数据集的小规模样本
d2l.DATA_HUB['dog_tiny'] = (d2l.DATA_URL + 'kaggle_dog_tiny.zip','0cb91d09b814ecdc07b50f31f8dcad3e81d6a86d')
demo = True
if demo:data_dir = d2l.download_extract('dog_tiny')
else:data_dir = os.path.join('..', 'data', 'dog-breed-identification')
3. 整理数据集
def reorg_dog_data(data_dir, valid_ratio):labels = d2l.read_csv_labels(os.path.join(data_dir, 'labels.csv'))d2l.reorg_train_valid(data_dir, labels, valid_ratio)d2l.reorg_test(data_dir)batch_size = 32 if demo else 128
valid_ratio = 0.1
reorg_dog_data(data_dir, valid_ratio)
4. 图像增广
transform_train = torchvision.transforms.Compose([torchvision.transforms.RandomResizedCrop(224, scale=(0.08, 1.0), ratio=(3.0/4.0,4.0/3.0)),torchvision.transforms.RandomHorizontalFlip(),torchvision.transforms.ColorJitter(brightness=0.4, contrast=0.4, saturation=0.4),torchvision.transforms.ToTensor(),torchvision.transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
transform_test = torchvision.transforms.Compose([torchvision.transforms.Resize(256),torchvision.transforms.CenterCrop(224),torchvision.transforms.ToTensor(),torchvision.transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
5. 读取数据
train_ds, train_valid_ds = [torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train_valid_test', folder),transform=transform_train) for folder in ['train', 'train_valid']
]
valid_ds, test_ds = [torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train_valid_test', folder),transform=transform_test) for folder in ['valid', 'test']
]
train_iter, train_valid_iter = [torch.utils.data.DataLoader(dataset, batch_size, shuffle=True, drop_last=True) for dataset in (train_ds, train_valid_ds)
]
valid_iter = torch.utils.data.DataLoader(valid_ds, batch_size, shuffle=False, drop_last=True
)
test_iter = torch.utils.data.DataLoader(test_ds, batch_size, shuffle=False, drop_last=True
)
6. 微调预训练模型
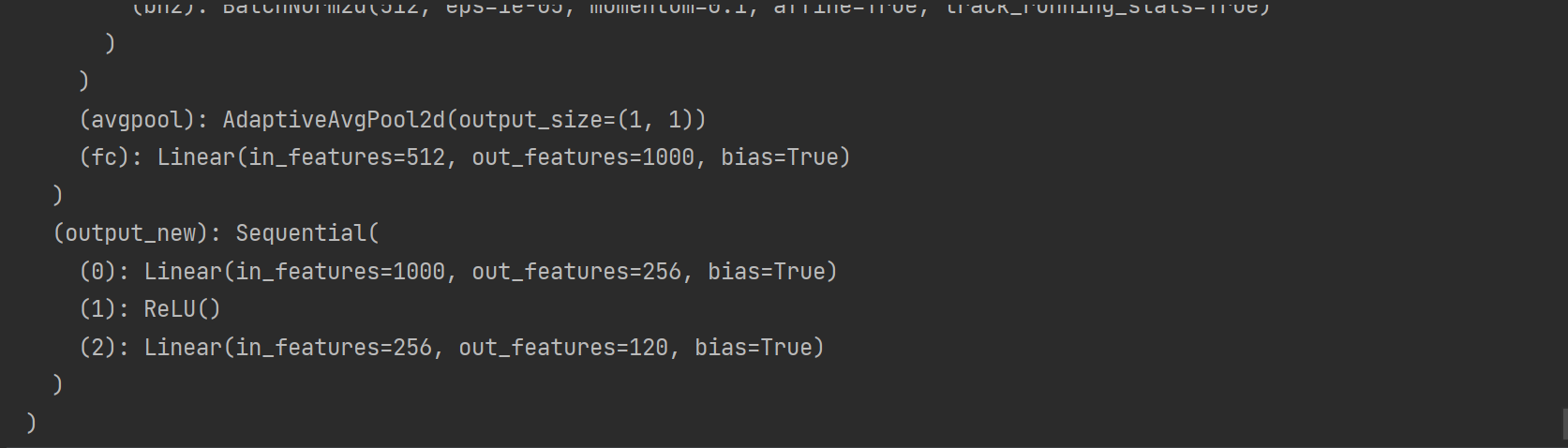
def get_net(devices):finetune_net = nn.Sequential()finetune_net.features = torchvision.models.resnet34(weights=torchvision.models.ResNet34_Weights.IMAGENET1K_V1)finetune_net.output_new = nn.Sequential(nn.Linear(1000, 256),nn.ReLU(),nn.Linear(256, 120))finetune_net = finetune_net.to(devices[0])for param in finetune_net.features.parameters():param.requires_grad = Falsereturn finetune_net
get_net(devices=d2l.try_all_gpus())
7. 定义损失函数和评价损失函数
loss = nn.CrossEntropyLoss(reduction='none')def evaluate_loss(data_iter, net, device):l_sum, n = 0.0, 0for features, labels in data_iter:features, labels = features.to(device[0]), labels.to(device[0])outputs = net(features)l = loss(outputs, labels)l_sum += l.sum()n += labels.numel()return (l_sum / n).to('cpu')
- 定义训练函数
def train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period, lr_decay):net = nn.DataParallel(net, device_ids=devices).to(devices[0])trainer = torch.optim.SGD((param for param in net.parameters() if param.requires_grad),lr=lr, momentum=0.9, weight_decay=wd)scheduler = torch.optim.lr_scheduler.StepLR(trainer, lr_period, lr_decay)num_batches, timer = len(train_iter), d2l.Timer()legend = ['train loss']if valid_iter is not None:legend.append('valid loss')animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs], legend=legend)for epoch in range(num_epochs):metric = d2l.Accumulator(2)for i, (features, labels) in enumerate(train_iter):timer.start()features, labels = features.to(devices[0]), labels.to(devices[0])trainer.zero_grad()output = net(features)l = loss(output, labels).sum()l.backward()trainer.step()metric.add(l, labels.shape[0])timer.stop()if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:animator.add(epoch + (i + 1) / num_batches, (metric[0] / metric[1], None))measures = f'train loss {metric[0] / metric[1]:.3f}'if valid_iter is not None :valid_loss = evaluate_loss(valid_iter, net, devices)animator.add(epoch + 1, (None, valid_loss.detach().cpu()))scheduler.step()if valid_iter is not None:measures += f', valid loss {valid_loss:.3f}'print(measures + f'\n{metric[1] * num_epochs / timer.sum():.1f}'f'examples/sec on {str(devices)}')
9. 训练模型
devices, num_epochs, lr, wd = d2l.try_all_gpus(), 10, 1e-4, 1e-4
lr_period, lr_decay, net, = 2, 0.9, get_net(devices)
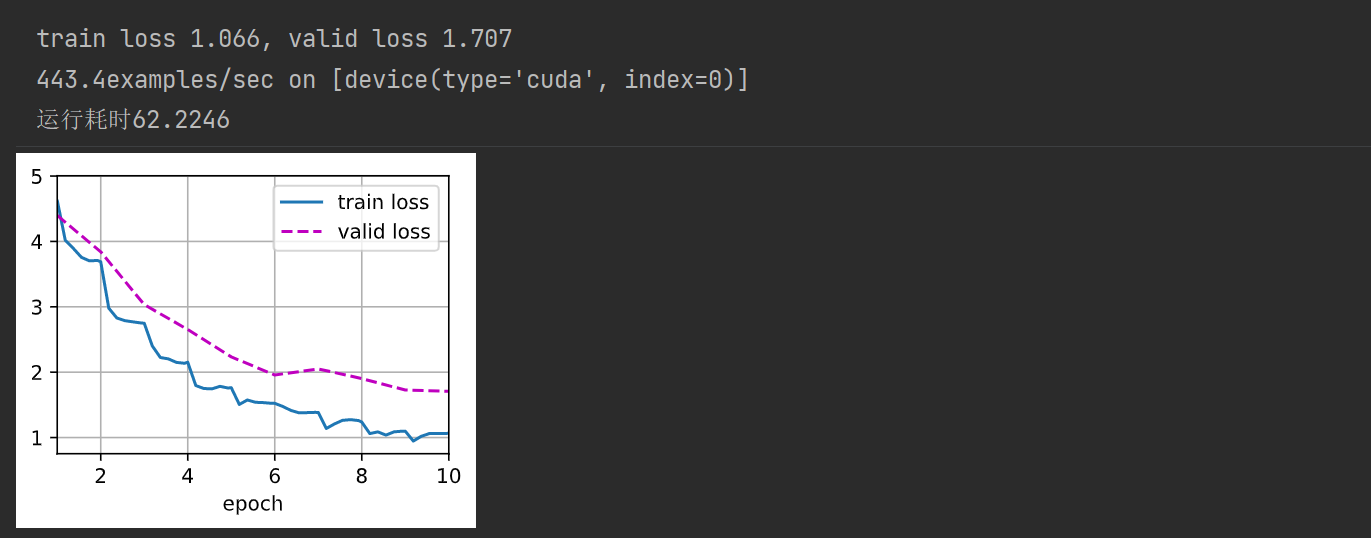
import time
start = time.perf_counter() train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period, lr_decay)
end = time.perf_counter()
print(f'运行耗时{(end-start):.4f}')






)




、淡入淡出轮播图(下)、折叠面板】(五)-全面详解(学习总结---从入门到深化))







