一、范数
· 定义:向量的范数表示一个向量有多大(分量的大小)
L1范数:
· 即向量元素绝对值之和,用符号 ‖ v ‖ 1 表示。
· 公式:
L2范数:
· 即向量的模,向量各元素绝对值的平方之和再开根号,用符号 ‖ v ‖ 2 表示。
· 公式:
Lp范数:
· 即向量范数的一般形式,各元素绝对值的p次幂之和再开p次根号,用符号 ‖ v ‖ p 表示。
· 公式:
二、权重衰减(L2正则化)
模型(函数)复杂度的度量:
· 一般通过线性函数 中的权重向量的某个范数(如
)来度量其复杂度
要想避免模型的过拟合,就要控制模型容量,使模型的权重向量尽可能小
· 通过限制参数值的选择范围来控制模型容量
衰减方法:
借助损失函数,将权重范数作为惩罚项添加到最小化损失中;使得损失函数的作用变为“最小化预测损失和惩罚项之和”。
损失函数公式如下:
· 其中, 是模型原本的损失函数,
是新添加的惩罚项。
· 正则化常数 用来描绘这种权衡,其为一个非负超参数。
· 的值越大,表示对
的约束较大;反之
的值越小,表示对
的约束较小。
※为何选用平方范数而不是标准范数:
· 便于计算。平方范数可以去掉平方根使得导数更容易计算,利于反向传播过程。
· 使用L2范数是因为它会对权重向量的大分量施加巨大的惩罚,使各权重均匀分布。
· L1范数惩罚会导致权重集中在某一小部分特征上,其它权重被清除为0(特征选择)。
使用该损失函数,就可以使梯度下降的优化算法在训练的每一步都衰减权重,避免过拟合发生。
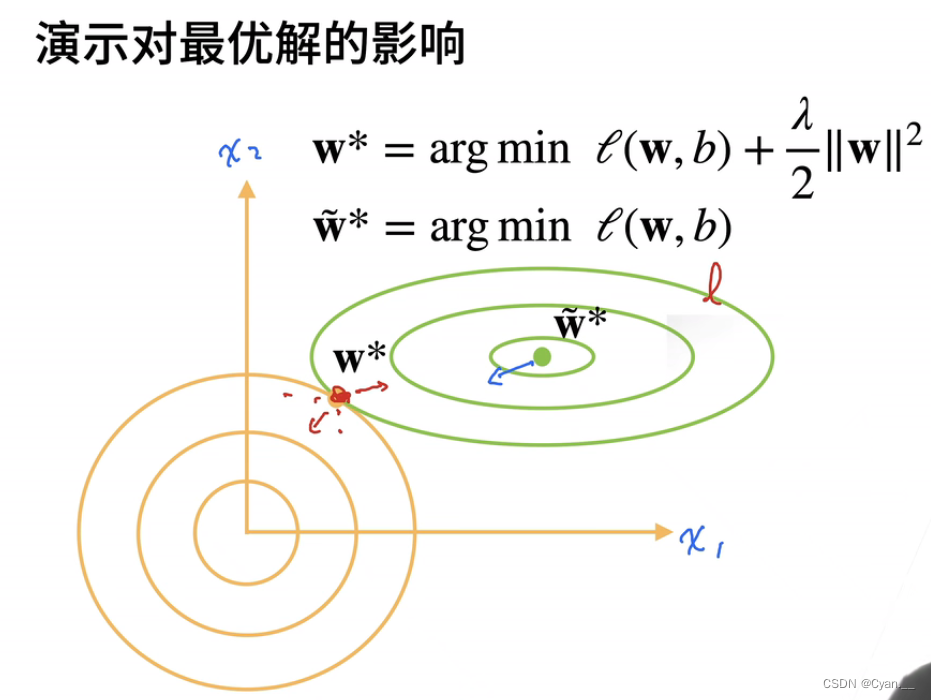
如上图所示,现在模型的损失函数同时受两项影响,一是误差项,二是惩罚项。
现在在等高线图上,梯度下降最终收敛的位置不再是某一个项所造成的最低点,因为在这时,可能误差项达到最小了,但是惩罚项很大,使得惩罚项拉着损失函数再向另一个方向移动。
只有当达到了两个项共同作用下的一个平衡点时,损失函数才具有最小值,这个时候的模型往往复杂度也降低了,虽然有可能造成训练损失增大,但是测试损失会减小。
三、代码实现权重衰减
从零实现代码如下:
import matplotlib
import torch
from torch import nn
from d2l import torch as d2l# 训练数据集、测试数据集、输入值、训练批次
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
# 初始化w和b的真实值
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
# 拿到训练数据
train_data = d2l.synthetic_data(true_w, true_b, n_train)
train_iter = d2l.load_array(train_data, batch_size)
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)# 初始化模型参数w和b
def init_params():w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)b = torch.zeros(1, requires_grad=True)return [w, b]
# 定义L2范数惩罚项
def l2_penalty(w):return torch.sum(w.pow(2)) / 2
# 实现训练代码,读入参数为兰姆达(正则化参数)
def train(lambd):w, b = init_params()net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_lossnum_epochs, lr = 100, 0.003animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',xlim=[5, num_epochs], legend=['train', 'test'])for epoch in range(num_epochs):for X, y in train_iter:# 增加了L2范数惩罚项,# 广播机制使l2_penalty(w)成为一个长度为batch_size的向量l = loss(net(X), y) + lambd * l2_penalty(w)l.sum().backward()d2l.sgd([w, b], lr, batch_size)if (epoch + 1) % 5 == 0:animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),d2l.evaluate_loss(net, test_iter, loss)))print('w的L2范数是:', torch.norm(w).item())
# 使用权重进行训练
train(lambd=3)
简洁实现代码如下:
import torch
from torch import nn
from d2l import torch as d2l# 训练数据集、测试数据集、输入值、训练批次
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
# 初始化w和b的真实值
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
# 拿到训练数据
train_data = d2l.synthetic_data(true_w, true_b, n_train)
train_iter = d2l.load_array(train_data, batch_size)
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)def train_concise(wd):net = nn.Sequential(nn.Linear(num_inputs, 1))for param in net.parameters():param.data.normal_()loss = nn.MSELoss(reduction='none')num_epochs, lr = 100, 0.003# 偏置参数没有衰减trainer = torch.optim.SGD([{"params":net[0].weight,'weight_decay': wd},{"params":net[0].bias}], lr=lr)animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',xlim=[5, num_epochs], legend=['train', 'test'])for epoch in range(num_epochs):for X, y in train_iter:trainer.zero_grad()l = loss(net(X), y)l.mean().backward()trainer.step()if (epoch + 1) % 5 == 0:animator.add(epoch + 1,(d2l.evaluate_loss(net, train_iter, loss),d2l.evaluate_loss(net, test_iter, loss)))print('w的L2范数:', net[0].weight.norm().item())train_concise(3)







)

)




)


——覆盖率)
)