市场转暖,但攘外需要同时安内。
市场降温之后,正迎来拐点
疫情之后,经济逐渐下行,服务机器人的“好日子”也随之结束,整个行业都在动荡中经历渡劫。根据TE智库报告显示,从2022年开始,我国服务机器人产量开始明显放缓,一直到2022年12月都处于同比下滑的状态。一时间,企业裁员、资本退场,成为了行业的负面热词,服务机器人真的只是昙花一现?
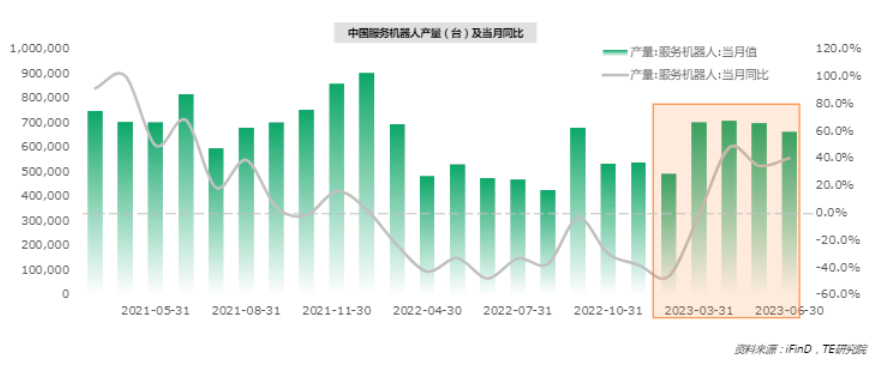
答案显然不是,无论是短期,还是长期,机器人的潜力都十分巨大。短期来看,根据TE智库报告显示,经历了连续12个月的下滑后,在今年4月我国服务机器人产量止跌并实现同比增长47.6%,到今年6月我国服务机器人产量为662658台, 同比增长40%,机器人需求向好的拐点已经出现。
长期来看,现阶段的动荡虽然导致市场降温,但也挤出了近几年揠苗助长的泡沫,为未来稳定增长奠定了基础。随着老龄化问题加剧,加之中青年逐渐远离低端服务业,这意味着我国有着庞大的市场需求。目前,服务机器人的渗透仍然极低,我国服务机器人市场还处在起步阶段,服务机器人只搭载在一些标准化程度较高的场景,随着服务机器人的能力不断展现,未来将会有更多用户搭载服务机器人。
释放机器人潜力,还需解决现有“硬伤”
随着部署量的增加,机器人面临的场景复杂度和类型正在与日俱增,这意味着机器人需要更强大的产品力。而从市场调查来看,现有的机器人产品还存在着各种问题,部署周期长、场景适应能力差、避障能力差等。想要真正释放机器人潜力,这些问题亟待解决。
众所周知,作为高技术门槛行业,机器人的开发迭代需要耗费大量时间和资金,以及漫长的市场验证。痛点催生需求,随着产业链逐渐完善,上游的技术供应商们提供了新选择。

自2017年成立以来,INDEMIND坚持深耕视觉导航技术,在机器人的导航、避障、决策、AI交互等关键技术和产品开发方面均有着深层次的积累和经验,针对现有的行业需求,INDEMIND将核心接轨融合研发了一套标准化的商用机器人底层解决方案「商用机器人AI Kit」。该方案以自研的INDEMIND OS Fusion AGI系统为基础,采用以双目立体相机为核心的多传感器融合架构,支持市面上不同品类的主流传感器,满足商用机器人导航定位、智能避障、路径规划、决策交互等核心功能的开发,能够广泛应用于商用清洁、酒店配送、送餐、巡检等商用服务机器人平台。
无需预部署,开机即用
商用机器人在投入使用前均需要现场部署,由厂商的工程师进行SLAM建图、目标点标注、测试等专业操作,往往需要花费大量时间。同时受限于传统marker定位与激光定位的技术局限性,在空间大、吊顶高、光环境复杂的商场、超市等场景中,存在贴码成本高、高空间难贴码、改造空间布局等情况,且容易发生因环境变化定位失准的问题,还会延长部署时间,而后续场景的空间布局一旦发生改变,依然需要工程师重新部署,无论对于厂商还是终端用户,最终落地成本都较高。
而INDEMIND「商用机器人AI Kit」则无需考虑这些问题,基于独有的立体视觉技术,机器人能够实时自主构建地图,做到新机器、新场景无需预部署,开机即用,且变更场景后,机器人也能自主更新地图,无需技术人员参与,大大降低使用成本,这与现有的机器人产品有着天然的区别。
场景自适应,不再担心场景变化
与部署问题类似,以激光雷达为核心的融合导航方案场景适应能力较差,一旦场景发生变化,机器人的作业质量便不可控,甚至需要技术人员重新部署才能使用。
而INDEMIND「商用机器人AI Kit」是采用以视觉为核心的融合导航方案,机器人支持全场景二维地图、三维地图及语义地图自主创建,且能够地图动态实时更新,显著提升机器人的场景适应能力。同时,INDEMIND拥有超过100个使用场景的海量数据,对于清洁、配送、导览、安防等多种工作场景有着深度理解,配合视觉多融合感知技术,能进一步提升机器人的环境自适应能力。
更灵敏、更精准、更智能,机器人避障也能“随心所欲”
目前机器人的避障方案主要是借助激光、ToF、结构光、双目等传感器采集场景内障碍物的点云信息,构建场景栅格地图,然后对障碍物进行避障,此类方案虽然能够满足机器人的避障需求,但也仅仅“刚刚能用”,对于动静态、低矮、悬空障碍物并不能一直有效检测。

INDEMIND商用机器人AI Kit
INDEMIND「商用机器人AI Kit」基于视觉优势,设计了一套系统化的安全决策系统,不仅实现了智能避障,还拥有主动安全功能。机器人能够稳定检测各类障碍物,支持低矮障碍物避障(地插、桌椅底座等);高反障碍物避障(玻璃、镜面等);全高障碍物避障(桌面、警戒线等),保障机器人在复杂环境下安全运行。
INDEMIND商用机器人AI Kit
同时,机器人能够实时检测抛物、行人、快速移动物体等突破情况外,并能够实时进行潜在风险判断(行人等),根据风险分类,提前做出规避策略,实现主动安全。
值得一提的是,「商用机器人AI Kit」相比激光雷达方案,成本下降60-80%,机器人开发成本最低可以下探到2千元以内,包含导航和电池的完整底盘成本则可以下探到5千元以内,显著降低机器人的开发成本和周期。
目前,INDEMIND已和国内外多家巨头客户达成合作,已签署订单超2万台,三年预期订单将超10万台。其中与传统清洁设备厂商ICE合作的中型清洁机器人Cobi18,已在全球十几个国家批量部署,且在欧美市场实现运行零故障。



——磁盘的物理和抽象结构)
)


:Qt 绘图技术与图形视图)





组件)



)
)
