1、复查时序路径详情
单击“ OK ”运行报告命令后 , 将打开一个新窗口。这样您即可复查其中内容。在其中可查看执行选定的每种类型 (min/max/min_max ) 的分析之后所报告的 N 条最差路径。 下图显示的“Report Timing ” ( 时序报告 ) 窗口中已选中最小和最大分析 ( SETUP 和 HOLD ), 且 N=4 。
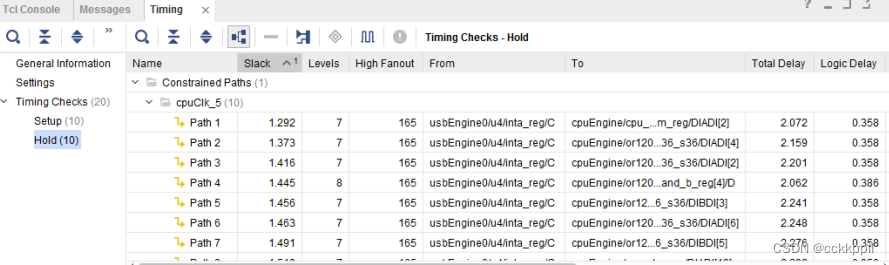
选中其中任意路径即可在“ Path Properties ” ( 路径属性 ) 窗口的“ Report ” ( 报告 ) 选项卡下查看其详情。
2、Report Timing Summary
综合后即可在流程中随时执行时序分析。您可复查由综合和实现运行自动创建的“ Timing Summary ” ( 时序汇总 ) 报告文件。 如果在存储器中已加载综合后设计或实现后设计, 那么还可通过以下方式生成交互式“ Timing Summary ”报告 :
• “ Flow Navigator ” → “ Synthesis ” ( Flow Navigator > 综合 )
• “ Flow Navigator ” → “ Implementation ” ( Flow Navigator > 实现 )
• “ Reports ” → “ Timing ” → “ Report Timing Summary ” ( 报告 > 时序 > 时序汇总报告 )
等效的 Tcl 命令为 report_timing_summary 。
在综合后设计中 , AMD Vivado ™ IDE 时序引擎会基于连接和扇出来估算信号线延迟。对于已由用户布局的单元之间的信号线, 延迟准确性更高。在包含部分预布局单元 ( 例如 , I/O 和 GT ) 的路径上 , 时钟偏差可能更大。 在实现后设计中, 基于实际布线信息来估算信号线延迟。对于已完全布线的设计 , 必须使用“ Timing Summary ”报告来实现时序验收。要验证设计是否已完全布线, 请复查“ Route Status ” ( 布线状态 ) 报告。 从 Tcl 控制台或从 GUI 运行此时序汇总报告时 , 可使用 -cells 选项将其限定于 1 个或多个层级单元。限定报告作用域后, 将仅报告含如下数据路径部分的路径 : 数据路径开始或结束于此类单元、与此类单元交汇或者完全包含于此类单元内。
从 Tcl 控制台运行时 , 此报告的第一部分提供了来自最新的 report_methodology 运行的方法论违例汇总信息。从GUI 运行 report_timing_summary 时 , 这部分名为“ Methodology Summary ” ( 方法论汇总 ) 。如果运行report_timing_summary 之前尚未运行 report_methodology , 则这部分为空。如果自从上一次 report_methodology 运行后已实现任意设计更改 , 那么违例汇总信息可能并未提供最新信息。
3、“ Report Timing Summary ”对话框
在 Vivado IDE 中 , “ Report Timing Summary ” ( 时序汇总报告 ) 对话框包含以下选项卡 :
• “ Options ”选项卡
• “ Advanced ”选项卡
• “ Timer Settings ”选项卡
位于“ Report Timing Summary ”对话框顶部的“ Results name ” ( 结果名称 ) 字段用于指定在“ Results ” ( 结果 ) 窗口中打开的图形化报告的名称。图形化版本的报告包含超链接, 支持您将来自报告的信号线和单元交叉引用至“Device ” ( 器件 ) 和“ Schematic ” ( 板级原理图 ) 窗口以及设计源文件。 如果该字段留空, 那么报告将返回 Tcl 控制台 , 且在“ Results ”窗口中不会打开图形化版本的报告。 等效的 Tcl 选项 : -name
“ Options ”选项卡
“ Report Timing Summary ” ( 时序汇总报告 ) 对话框中的“ Options ” ( 选项 ) 选项卡如下图所示。
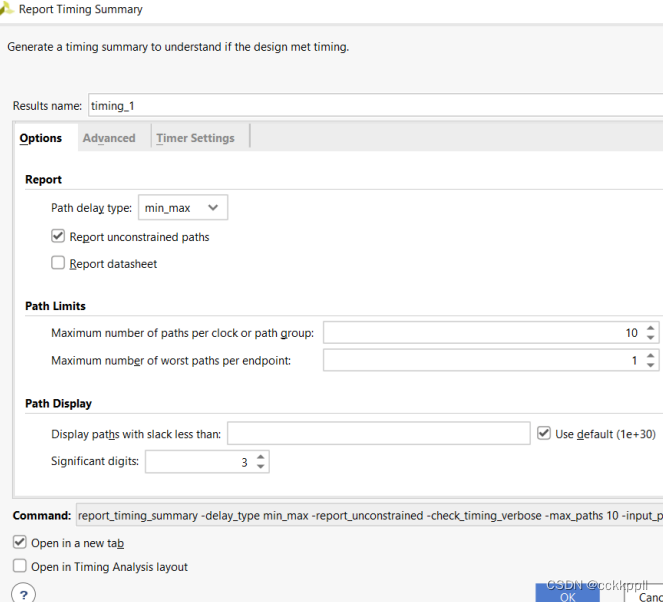
“ Report ”部分
“ Report Timing Summary ” ( 时序汇总报告 ) 对话框的“ Options ” ( 选项 ) 选项卡的“ Report ” ( 报告 ) 部分包含 以下内容:
• “ Path delay type ” ( 路径延迟类型 )
用于设置要运行的分析类型。对于综合后设计 , 默认情况下仅执行最大延迟分析 ( 建立 / 恢复 ) 。对于已实现的设计, 默认情况下 , 将执行最小和最大延迟分析 ( 建立 / 保持和恢复 / 移除 ) 。要仅运行最小延迟分析 ( 保持和移除), 请选择延迟类型 min 。 等效的 Tcl 选项 : -delay_type
• “ Report unconstrained paths ” ( 报告未约束路径 )
生成不含时序要求的路径的相关信息。默认情况下 , 在 Vivado IDE 中已选中该选项 , 但在等效的 Tcl 命令 report_timing_summary 中默认不开启该选项。等效的 Tcl 选项 : -report_unconstrained
• “ Report datasheet ” ( 数据手册报告 ) 生成本章中的 Report Datasheet 中所定义的设计数据手册。 等效的 Tcl 选项 : -datasheet
“ Path Limits ”部分
“ Report Timing Summary ” ( 时序汇总报告 ) 对话框中“ Options ” ( 选项 ) 选项卡的“ Path Limits ” ( 路径限制 ) 部 分包括:
• “ Maximum number of paths per clock or path group ” ( 各时钟或路径组的最大路径数 ): 控制每个时钟对或每个路径组所报告的最大路径数。 等效的 Tcl 选项 : -max_paths
• “ Maximum number of worst paths per endpoint ” ( 各端点的最差路径的最大数量 ): 控制每个路径端点可能报告的最大路径数。此限制受到每个时钟对或路径组的最大数量的限制。因此, 报告的路径总数仍受到 -max_paths 数量的限制。 等效的 Tcl 选项 : -nworst
“ Path Display ”部分
“ Report Timing Summary ” ( 时序汇总报告 ) 对话框的“ Options ” ( 选项 ) 选项卡的“ Path Display ” ( 路径显示 ) 部分包括:
• “ Display paths with slack less than ” ( 显示裕量小于指定值的路径 ): 基于路径的裕量值筛选报告的路径。此选项不影响汇总表的内容。 等效的 Tcl 选项 : -slack_lesser_than
• “ Significant digits ” ( 有效位数 ): 控制报告中显示的数值的精确度。 等效的 Tcl 选项 : -significant_digits
通用部分
以下控件为位于“ Report Timing Summary ” ( 时序汇总报告 ) 对话框底部的全部 3 个选项卡通用的控件 :
• “ Command ” ( 命令 ): 显示等效于“ Report Timing Summary ”对话框中指定的各种选项的 Tcl 命令行。
• “ Open in a New Tab ” ( 在新选项卡中打开 ): 在新选项卡中打开结果 , 或替换“ Results ” ( 结果 ) 窗口中打开的最后一个选项卡。
• “ Open in Timing Analysis layout ” ( 在时序分析布局中打开 ): 将当前视图布局复位为“ Timing Analysis ” ( 时序 分析) 视图布局。
“ Advanced ”选项卡
Report ”部分
• “ Report from cell ” ( 基于单元的报告 ): 启用该选项即可将时序报告限制在设计的特定单元上。报告将仅包含数据路径部分始于指定单元、止于该单元、跨该单元或完全包含于该单元内的路径。
等效的 Tcl 选项 : -cells
• “ Show input pins in path ” ( 显示路径中的输入管脚 ): 显示用于路径的单元输入管脚。 等效的 Tcl 选项 : -input_pins
• “ Report unique Pins ” ( 唯一管脚报告 ): 针对每一组唯一的管脚仅显示 1 条时序路径。
等效的 Tcl 选项 : -unique_pins
“ File Output ”部分
• “ Write results to file ” ( 将结果写入文件 ): 将结果写入指定文件名。默认情况下 , 报告将写入 Vivado IDE 的 “Timing ” ( 时序 ) 窗口。
等效的 Tcl 选项 : -file
• “ Overwrite ” ( 覆盖 ) 或“ Append ” ( 追加 ): 当报告写入文件时 , 这 2 个选项可用于确定 (1) 覆盖指定文件 , 还是 (2) 向现有报告追加新信息。
等效的 Tcl 选项 : -append
• “ Interactive report file ” ( 交互式报告文件 ): 将结果以 AMD RPX 格式写入指定的文件中。 RPX 文件是一个包含所有报告信息的交互式报告, 可在 Vivado Design Suite 中使用 open_report 命令将其重新加载到存储器中。
“ Miscellaneous ”部分
• “ Ignore command errors ” ( 忽略命令错误 ): 以静默方式执行命令 , 忽略所有命令行错误 , 不返回任何消息。此命令还会返回 TCL_OK , 忽略执行期间遇到的所有错误。 等效的 Tcl 选项 : -quiet
• “ Suspend message limits during command execution ” ( 命令执行期间暂挂消息限制 ): 临时覆盖所有消息限制并返回所有消息。 等效的 Tcl 选项 : -verbose
“ Timer Settings ”选项卡
如需执行定时器设置 , 请使用如下任一方法 : (1) 任一 Vivado IDE 时序分析对话框 ; 或者 (2) 本节中列出的任一 Tcl 命令。这些设置会影响同一 Vivado IDE 会话内运行的其他时序相关命令 , 但综合和实现命令除外。 定时器设置不保存为工具首选项。每个新会话都会复原默认值。请勿更改默认值。保留默认值将以最准确的延迟值来提供最大的时序分析覆盖范围。
“ Interconnect ” 设置
该选项用于控制信号线延迟计算方式 : 根据估算的叶节点单元管脚间布线距离来计算 , 还是根据实际布线的信号线来计算, 或者从时序分析中排除信号线延迟。对于综合后设计 , 该选项自动设置为“ Estimated ” , 对于实现后设计 , 该选 项自动设置为“Actual ”。
• “ Estimated ” ( 估算 ): 对于未布局的单元 , 信号线延迟值对应于可能实现的最佳布局的延迟 , 基于驱动程序和负载的性质以及扇出来计算。在时序路径报告中, 未布局的叶节点单元管脚之间的信号线标记为未布局 (unplaced) 。 对于已布局的单元, 信号线延迟取决于驱动程序和负载之间的距离以及扇出。此信号线在时序路径报告中标记为estimated。
• “ Actual ” ( 实际 ): 对于已布线的信号线 , 信号线延迟对应于已布线的互连的实际硬件延迟。此信号线在时序路径报告中标记为 routed 。
• “ None ” ( 无 ): 在时序报告中不考虑互连延迟 , 信号线延迟强制为 0 。 等效的 Tcl 命令 : set_delay_model
“ Multi-Corner Configuration ”设置
指定要针对指定时序角分析的路径延迟类型。有效值包括 none 、 max 、 min 和 min_max 。选择 none 为指定时序角禁用的时序分析。等效的 Tcl 命令:config_timing_corners
Disable Flight Delays
不将封装延迟添加到 I/O 延迟计算中。 等效的 Tcl 命令 : config_timing_analysis
 - opencv python)


![[Vue 配置] Vite + Vue3 项目配置 Tailwind CSS](http://pic.xiahunao.cn/[Vue 配置] Vite + Vue3 项目配置 Tailwind CSS)







)



通信:通信模型、Hello World与拓展)
汉化无效解决方法)


)