在OSG中多视图的管理是通过osgViewer::CompositeViewer类来实现的。该类负责多个视图的管理及同步工作,继承自osgViewer;:ViewerBase类,继承关系图如图8-13所示

图8-13 osgViewer::CompositeViewer 的继承关系图
在前面已经讲到,osgViewer:ViewerBase 类主要负责线程管理、设置线程模式、启动线程等工作在多视图渲染时,线程管理一直都是一个令人非常头痛的问题,但这些底层工作在 osgViewer::CompositeViewer类中已经实现了。如果读者想了解得更详细,可参看osgViewer/CompositeViewer.cpp源代码。
对于osgViewer::CompositeViewer,它内部已经包含了多个视图(osg::View),使用它来表示一个视图当然是可以的,此时osgViewer:CompositeViewer 的作用与标准的osgViewer::Viewer 对象并无太大差别,但是比起每次只管理一个视图的情形来说,管理和使用多个视图还是显得略微麻烦。因此,建议在只有一个视图时尽量选择使用 osgViewer::Viewer。当然,有时可能需要用到不止一个视图,也可能在多个视口内显示同一视图的内容(如多数 CAD 软件),或同时显示一个3D场景和一幅小地图视图,或读取多个模型文件并分别独立地进行控制。对于这些程序来说,往往需要在一个或多个场景(osgVicwer:Scene)上管理多个视图(osgView)此时程序的管理方式要比单独的osgViewer.:Viewer情形下复杂得多。事实上,程序的细节程度总是与问题的复杂程度成比例的,因此,我们有必要在正确的条件下选择正确的实现方式。
在osgViewer:CompositeViewer中添加视图或移除视图可以用下面的成员函数:
void addView(osgViewer.:View*view)//添加一个视图
void removeView(osgViewer::View*view)//移除一个视图
osgViewer::View *getView(unsigned i) //得到视图的索引
const osgViewer::View *getView(unsigned i)const//得到视图的索引
unsigned int getNumViews() const//得到视图的个数
在论坛上,有很多人会提问如何来做一个“鹰眼”,其实,这是比较简单的实现。用osgViewer.:CompositeViewer类实现多视图管理,让一个小地图HUD显示一个视图,另一个视图染主窗口即可。本书并没有专门提供一个相关的例子,读者可以通过修改本书的例子来自行完成
- 多视图相机渲染示例
多视图相机渲染示例的代码如程序清单8-5所示
// 多视图相机渲染示例
void compositeViewer_8_5(const string &strDataFolder)
{// 创建CompositeViewer对象osg::ref_ptr<osgViewer::CompositeViewer> viewer = new osgViewer::CompositeViewer();// 获取牛的模型string strDataPath = strDataFolder + "cow.osg";osg::ref_ptr<osg::Node> cow = osgDB::readNodeFile(strDataPath);// 读取飞机模型strDataPath = strDataFolder + "cessna.osg";osg::ref_ptr<osg::Node> cessna = osgDB::readNodeFile(strDataPath);// 优化场景数据osgUtil::Optimizer optimizer;optimizer.optimize(cow.get());optimizer.optimize(cessna.get());// 设置图形环境特性osg::ref_ptr<osg::GraphicsContext::Traits> traits = new osg::GraphicsContext::Traits();traits->x = 100;traits->y = 100;traits->width = 900;traits->height = 700;traits->windowDecoration = true;traits->doubleBuffer = true;traits->sharedContext = 0;// 创建图形环境特性osg::ref_ptr<osg::GraphicsContext> gc = osg::GraphicsContext::createGraphicsContext(traits.get());if (gc->valid()){osg::notify(osg::INFO) << " GraphicsWIndow has been created successfully." << endl;// 清除窗口颜色及颜色和深度缓冲gc->setClearColor(osg::Vec4f(0.2f, 0.2f, 0.6f, 1.0f));gc->setClearMask(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);}else{osg::notify(osg::NOTICE) << " GrraphicsWidnow has not been created successfully." << endl;}//视图1{// 创建视图1osg::ref_ptr<osgViewer::View> view = new osgViewer::View;viewer->addView(view.get());// 设置视图场景数据view->setSceneData(cow.get());// 设置相机视口及图形环境view->getCamera()->setViewport(new osg::Viewport(0, 0, traits->width / 2, traits->height / 2));view->getCamera()->setGraphicsContext(gc.get());// 设置操作器view->setCameraManipulator(new osgGA::TrackballManipulator);// 添加事件处理view->addEventHandler(new osgViewer::StatsHandler);view->addEventHandler(new osgViewer::WindowSizeHandler);view->addEventHandler(new osgViewer::ThreadingHandler);view->addEventHandler(new osgViewer::RecordCameraPathHandler);}// 视图2{osg::ref_ptr<osgViewer::View> view = new osgViewer::Viewer;viewer->addView(view.get());view->setSceneData(cessna.get());view->getCamera()->setViewport(new osg::Viewport(traits->width / 2, 0, traits->width / 2, traits->height / 2));view->getCamera()->setGraphicsContext(gc.get());view->setCameraManipulator(new osgGA::TrackballManipulator);}// 视图3{osg::ref_ptr<osgViewer::View> view = new osgViewer::View;viewer->addView(view.get());view->setSceneData(cessna.get());// 根据分辨率确定合适的投影来保证显示的图形不变形double fovy, aspectRatio, zNear, zFar;view->getCamera()->getProjectionMatrixAsPerspective(fovy, aspectRatio, zNear, zFar);double newAspectRatio = double(traits->width) / double(traits->height/2);double aspectRaitoChange = newAspectRatio / aspectRatio;if (aspectRaitoChange != 1.0){view->getCamera()->getProjectionMatrix() *= osg::Matrix::scale(1.0 / aspectRaitoChange, 1.0, 1.0);}view->getCamera()->setViewport(new osg::Viewport(0, traits->height / 2, traits->width, traits->height / 2));view->getCamera()->setGraphicsContext(gc.get());view->setCameraManipulator(new osgGA::TrackballManipulator);}viewer->realize();viewer->run();
}
运行程序,截图如图8-14所示
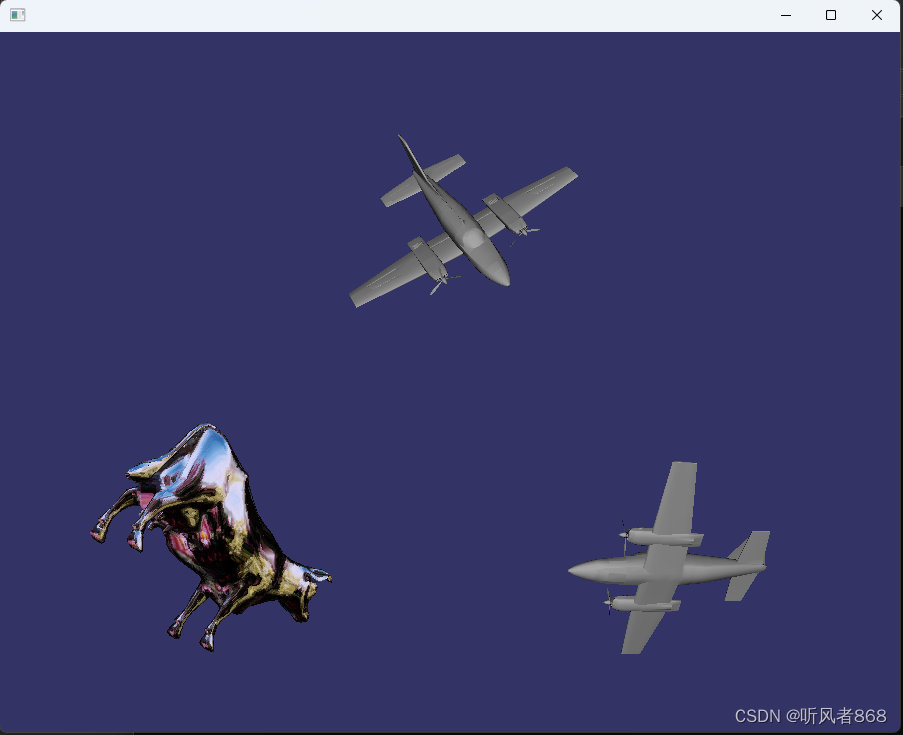
图8-14多视图相机渲染示例截图







Truffle自定义测试helloworld)



)
)






