0. 简介
对于激光雷达的地面估计分割,目前其实有很多方法做了快速并鲁棒的分割,比如说我们之前写的一篇《经典文献阅读之–FEC》一文中就给出了快速分割的方案,当中第一步就是需要对地面进行分割。而我们这次看的是一篇使用均匀B样条的方法来从LiDAR数据中快速且鲁棒地估计地平面的方法。《Fast and Robust Ground Surface Estimation from LIDAR Measurements using Uniform B-Splines》一文中提到,该方法地面表面被建模为一个均匀B样条,该样条对不同的测量密度具有鲁棒性,并且通过一个单一参数来控制平滑性先验。然后将估计过程建模为一个鲁棒最小二乘优化问题,可以重新表述为一个线性问题,从而可以高效地解决地面点分割的问题,相关的代码也已经在Github上开源了。
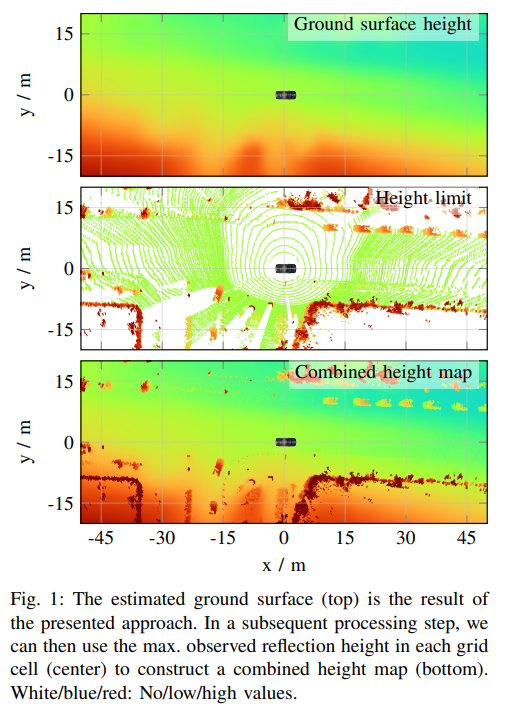
图1:估计的地面表面(顶部)是所提出方法的结果。在随后的处理步骤中,我们可以使用每个网格单元中观测到的最大反射高度(中间)来构建一个组合高度图(底部)。白色/蓝色/红色:无/低/高数值。
1. 相关工作
为了实现场景理解,我们需要获取地面的几何信息。地面信息可以从地图上获取,也可以通过测距传感器测量得到,或者通过多个数据源进行融合得到。使用地图信息的缺点是需要有准确的位姿估计(包括滚动和俯仰角),但这种估计并不能始终保证准确。因此,我们选择从测距传感器的测量数据中估计地面表面,以便避免其他错误来源(例如,位姿估计的错误)。为了实现快速和稳健的地面表面表示,我们采用了均匀B样条。我们用地面模型 g : R 2 → R g: \mathbb{R}^2 → R g:R2→R将测量点的平面坐标映射到平面距离。
Moosmann等人的工作[2]并没有估计地面表面的形状,而是使用局部凸性准则对范围图像中的每一个点进行分割。这种方法提供了准确的点分类结果,但只能应用于图像结构中的单个范围测量。因此,当有多个测量结果可用时,很难解决点分类冲突。
Zhang等人[3]开发了一个渐进式形态滤波器,用于估计在高程网格上表示的机载LiDAR测量结果的地面表面。作者通过逐渐增加滤波器窗口大小,并使用高程阈值,去除非地面测量,同时保留地面表面的高程。他们的方法在准确的高程地图上工作得很好,这些地图有大面积的地面区域和像建筑物或树木这样的局部高程。然而,Zhang等人[3]并没有考虑测量误差,比如多路径传播,这将导致错误的高程估计。此外,这种方法无法实时处理,因为需要进行多次过滤。
多项式是表示地面表面的一种常用方式:
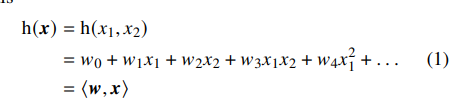
例如,平面、二次或三次曲线可以表示为权重 w w w和转换输入 x x x的线性组合。这会产生一系列的线性方程,我们可以通过例如最小二乘法(LLS)等有效方法进行求解。例如,Saleem等人[4]使用多项式表示法来拟合立体摄像头的v-disparity估计的地面表面。
Wedel等人[5]通过一元B样条来模拟沿行驶方向的地面表面。他们结合了卡尔曼滤波器,采用最小二乘法来估计和跟踪其参数。
Beck[6]使用带有平滑正则化的均匀B样条(UBS)表面来模拟依赖于相机图像坐标的观测射线。他通过惩罚项描述了 n n n阶导数的平滑度。


Spring源码解析:Spring MVC)



)
)











