前言:
目录:
- 强化学习概念
- 马尔科夫决策
- Bellman 方程
- 格子世界例子
一 强化学习
强化学习 必须在尝试之后,才能发现哪些行为会导致奖励的最大化。
当前的行为可能不仅仅会影响即时奖赏,还有影响下一步奖赏和所有奖赏
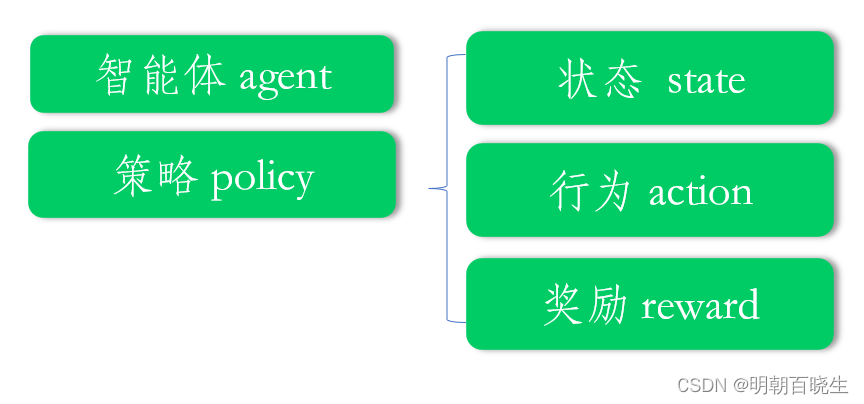
强化学习五要素如下:
1.2 强化学习流程

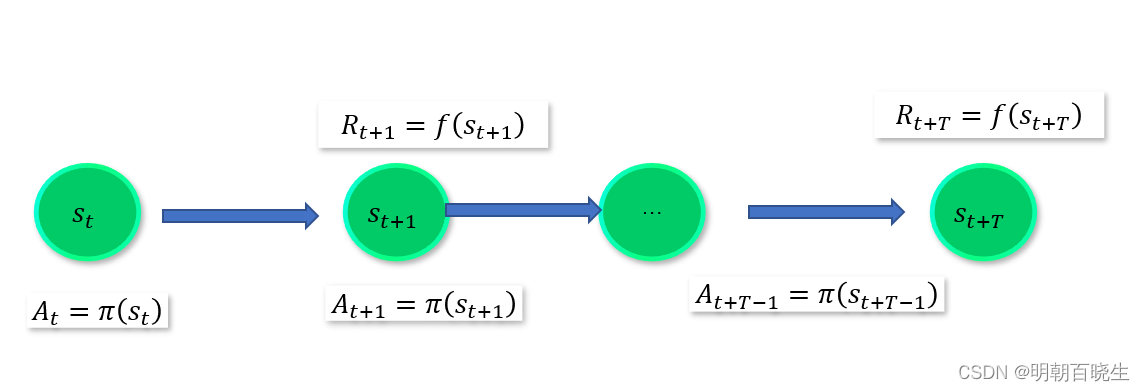
1: 产生轨迹(trajectory)
2: 策略评估(policy-evaluate)
3: 策略提升(policy-improve)
这里重点讲一下 产生轨迹:
当前处于某个state 下面,
按照策略选择 action =
根据新的state 给出 reward:
最后产生了轨迹链
二 马尔科夫决策
2.1 马尔科夫决策要求:
1: 能够检测到理想的状态
2: 可以多次尝试
3: 系统的下个状态只与当前信息有关,与更早的状态无关。
决策过程中还可和当前采取的动作有关.
2.2 马尔科夫决策五要素
S: 状态集合 states
A: 动作集合 actions
P: 状态转移概率
R: 奖励函数(reward function) ,agent 采取某个动作后的及时奖励
r: 折扣系数意味当下的reward 比未来反馈更重要
2.3 主要流程
1: Agent 处于状态
2: 按照策略 选择动作
3:执行该动作后,有一定的概率转移到新的状态

2.4 价值函数
当前时刻处于状态s,未来获得期望的累积奖赏
分为两种: state 价值函数 state-action 价值函数
最优价值函数:
不同策略下, 累积奖赏最大的
2.5 策略 policy
当前状态s 下,按照策略,要采用的动作
三 Bellman 方程
4.1 状态值函数为:
: T 步累积奖赏
:
折扣累积奖赏,
4.2 Bellman 方程
证明:
r折扣奖赏bellman 方程
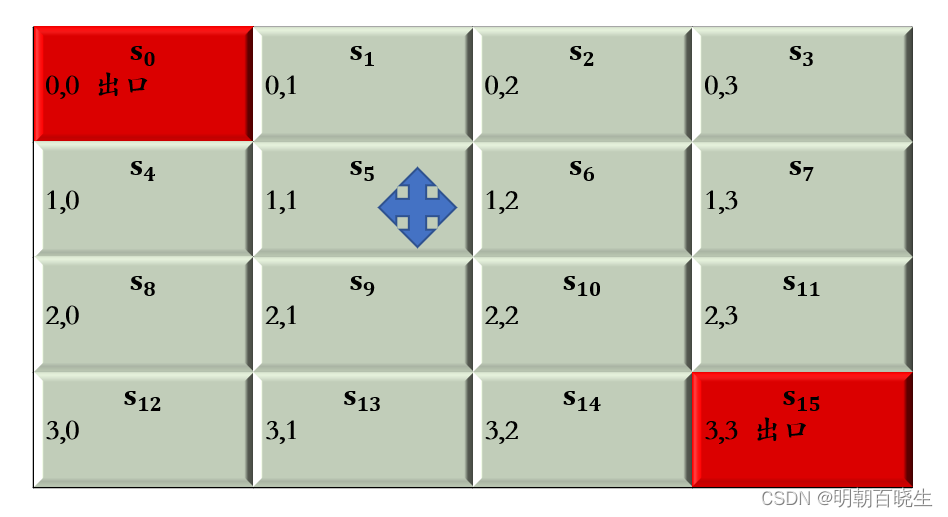
四 格子世界例子
在某个格子,执行上下左右步骤,其中步骤最短的
为最优路径
5.1:gridword.py
import numpy as np#手动输入格子的大小
WORLD_SIZE = 4
START_POS = [0,0]
END_POS = [WORLD_SIZE-1, WORLD_SIZE-1]
prob = 1.0
#折扣因子
DISCOUNT = 0.9
# 动作集={上,下,左,右}
ACTIONS = [np.array([0, -1]), #leftnp.array([-1, 0]), # upnp.array([0, 1]), # rightnp.array([1, 0])] # downclass GridwordEnv():def action_name(self, action):if action ==0:name = "左"elif action ==1:name = "上"elif action ==2:name = "右"else:name = "上"return namedef __init__(self):self.nA = 4 #action:上下左右self.nS = 16 #state: 16个状态self.S = []for i in range(WORLD_SIZE):for j in range(WORLD_SIZE):state =[i,j]self.S.append(state)def step(self, s, a):action = ACTIONS[a]state = self.S[s]done = Falsereward = 0.0next_state = (np.array(state) + action).tolist()if (next_state == START_POS) or (state == START_POS):next_state = START_POSdone = Trueelif (next_state == END_POS) or (state == START_POS):next_state = END_POSdone = Trueelse:x, y = next_state# 判断是否出界if x < 0 or x >= WORLD_SIZE or y < 0 or y >= WORLD_SIZE:reward = -1.0next_state = stateelse:reward = -1.0return prob, next_state, reward,done
5.2 main.py
# -*- coding: utf-8 -*-
"""
Created on Mon Nov 13 09:39:37 2023@author: chengxf2
"""import numpy as npdef init_state(WORLD_SIZE):S =[]for i in range(WORLD_SIZE):for j in range(WORLD_SIZE):state =[i,j]S.append(state) print(S)# -*- coding: utf-8 -*-
"""
Created on Fri Nov 10 16:48:16 2023@author: chengxf2
"""import numpy as np
import sys
from gym.envs.toy_text import discrete #环境
from enum import Enum
from gridworld import GridwordEnvclass Agent():def __init__(self,env):self.discount_factor = 1.0 #折扣率self.theta = 1e-3 #最大偏差self.S = []self.env = env#当前处于的位置,V 累积奖赏def one_step_lookahead(self,s, v):R = np.zeros((env.nA)) #不同action的累积奖赏for action in range(env.nA):prob, next_state,reward, done = env.step(s, action) #只有一个next_state_index = self.env.S.index(next_state)#print("\n state",s ,"\t action ",action, "\t new_state ", next_state,"\t next_state_index ", next_state_index,"\t r: ",reward)r= prob*(reward + self.discount_factor*v[next_state_index])R[action] +=r#print("\n state ",s, "\t",R) return Rdef value_iteration(self, env, theta= 1e-3, discount_factor =1.0):v = np.zeros((env.nS)) #不同状态下面的累积奖赏,16个状态iterNum = 0while True:delta = 0.0for s in range(env.nS):R = self.one_step_lookahead(s,v)#在4个方向上面得到的累积奖赏best_action_value = np.max(R)#print("\n state ",s, "\t R ",R, "\t best_action_value ",best_action_value)bias = max(delta, np.abs(best_action_value-v[s]))v[s] =best_action_value#if (s+1)%4 == 0:#print("\n -----s ------------",s)iterNum +=1if bias<theta:breakprint("\n 迭代次数 ",iterNum)return vdef learn(self):policy = np.zeros((env.nS,env.nA))v = self.value_iteration(self.env, self.theta, self.discount_factor)for s in range(env.nS):R = self.one_step_lookahead(s,v)best_action= np.argmax(R)#print(s,best_action_value )policy[s,best_action] = 1.0return policy,vif __name__ == "__main__":env = GridwordEnv()agent =Agent(env)policy ,v = agent.learn()for s in range(env.nS):action = np.argmax(policy[s])act_name = env.action_name(action)print("\n state ",s, "\t action ",act_name, "\t 累积奖赏 ",v[s])参考:
【强化学习玩游戏】1小时竟然就学会了强化学习dqn算法原理及实战(人工智能自动驾驶/深度强化学习/强化学习算法/强化学习入门/多智能体强化学习)_哔哩哔哩_bilibili
2-强化学习基本概念_哔哩哔哩_bilibili
3-马尔科夫决策过程_哔哩哔哩_bilibili
4-Bellman方程_哔哩哔哩_bilibili
5-值迭代求解_哔哩哔哩_bilibili



)


)
)
)

(无图形界面)(亲测可用))

:Halcon导出c#脚本和WPF初步开发)


:伪随机数的产生)



