目录
1.什么是进程优先级?
2.进程优先级原理
3.查看进程优先级
4.修改进程优先级
4.1 setpriority函数原型
4.2 getpriority函数原型
4.3 sched_setscheduler函数原型
4.4 sched_getscheduler函数原型
4.5 sched_setparam函数原型
4.6 sched_getparam函数原型
1.什么是进程优先级?
Linux进程的优先级是用来确定在多个进程同时运行时,哪个进程会获得更多的CPU时间片。
Linux进程的优先级分为实时优先级和普通优先级。
实时优先级用于实时应用程序,如硬实时任务和实时控制系统,而普通优先级用于非实时应用程序。
2.进程优先级原理
-
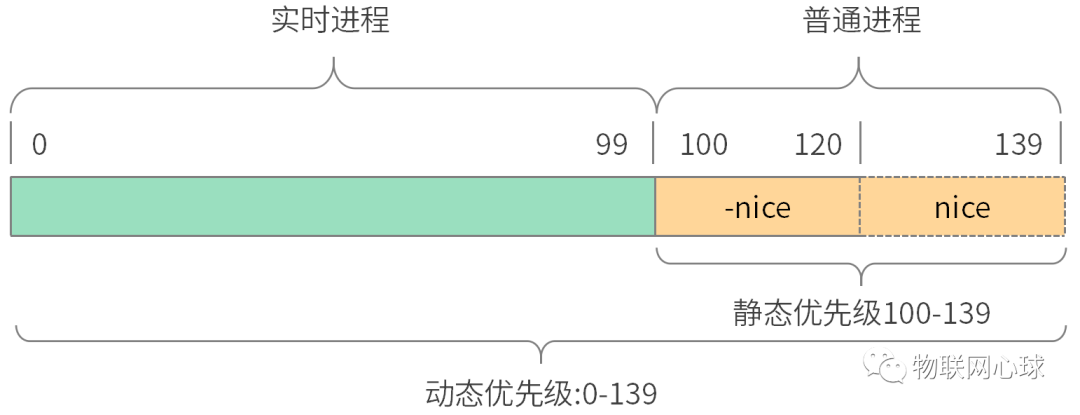
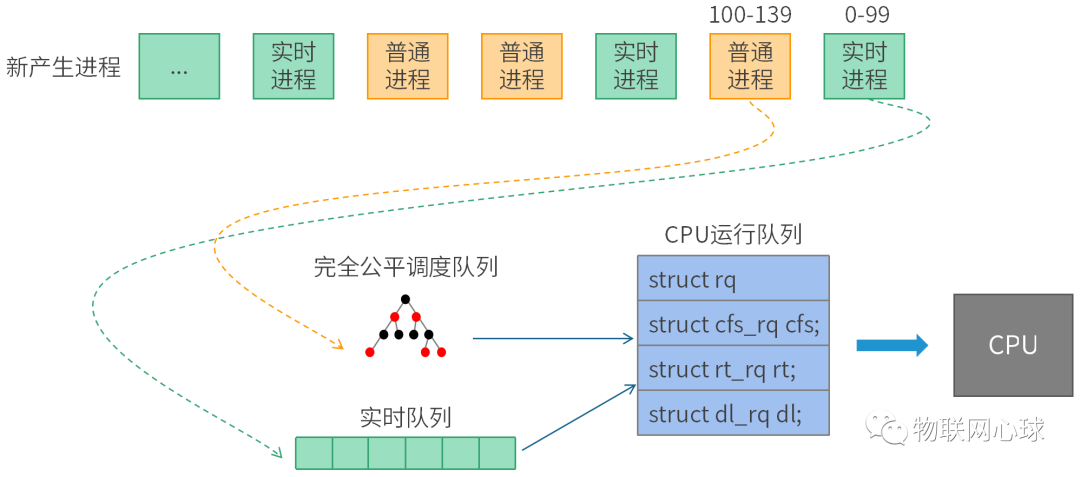
实时进程:动态优先级为0-99的进程,采用实时调度算法调度。
-
普通进程:动态优先级为100-139的进程,采用完全公平调度算法调度。
-
nice值:是用于调整普通进程优先级的参数。范围:-20-19。
2.1 task_struct优先级
task_struct {
......
int prio;
int static_prio;
int normal_prio;
unsigned int rt_priority;
};
-
prio(动态优先级)
动态优先级,有效优先级,调度器最终使用的优先级数值,范围0-139,值越小,优先级越高。
-
static_prio(静态优先级)
静态优先级,采用SCHED_NORMAL和SCHED_BATCH调度策略的进程(即普通进程)用于计算动态优先级的,范围100-139。
prio = static_prio = nice + DEFAULT_PRIO = nice + 120。
-
normal_prio(归一化优先级)
用于计算prio的中间变量,不需要太关心。
-
rt_priority(实时优先级)
实时优先级,采用SCHED_FIFO和SCHED_RR调度策略进程(即实时进程)用于计算动态优先级,范围0-99。
prio = MAX_RT_PRIO - 1 - rt_prio = 100 - 1 - rt_priority;
实时优先级数值越大,得到的动态优先级数值越小,优先级越高。
3.查看进程优先级
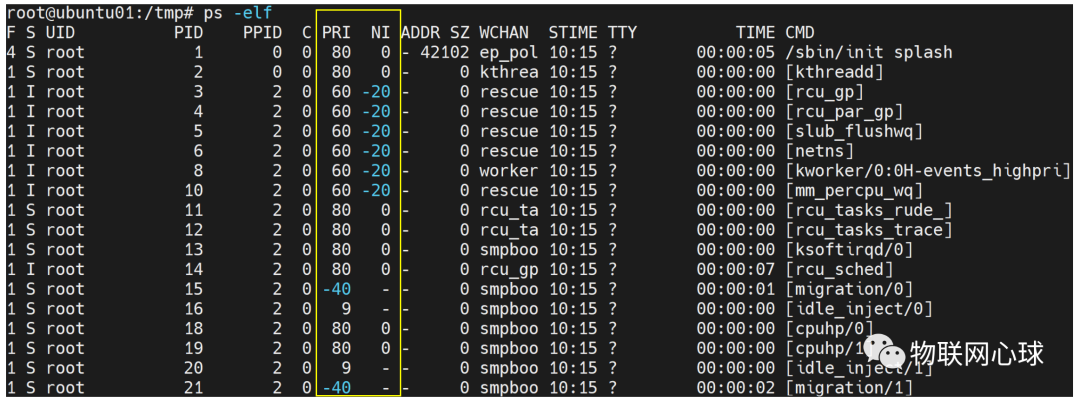
3.1 执行ps -elf 命令查看进程优先级
PRI:进程优先级,数值越小,优先级越高。(并非动态优先级)
NI:nice值。
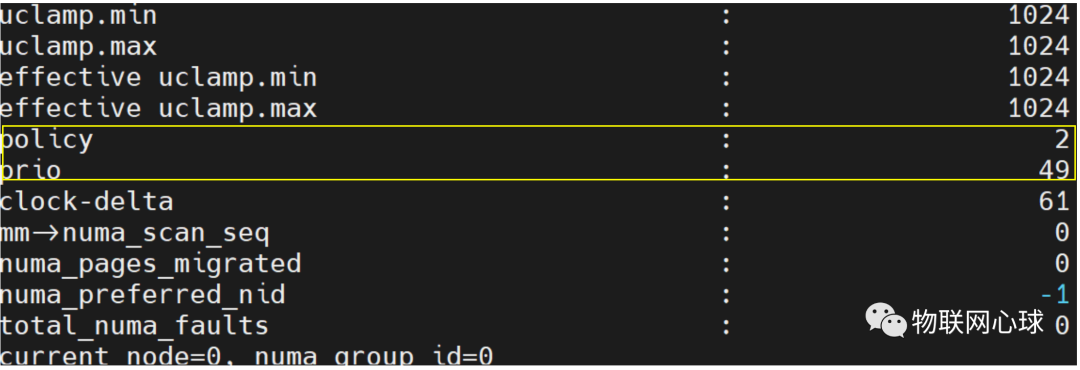
3.2cat /proc/PID/sched查看进程调度信息
policy:调度策略
prio:动态优先级
4.修改进程优先级
4.1 setpriority函数原型
int setpriority(int which, id_t who, int prio);
功能:setpriority函数用于设置进程nice值。
参数:
which:指定要修改nice值的对象,可以是以下值之一:
-
PRIO_PROCESS:用于修改指定进程的优先级。
-
PRIO_PGRP:用于修改指定进程组的优先级。
-
PRIO_USER:用于修改指定用户的所有进程的优先级。
who:指定被修改优先级的对象的标识符。
-
如果which为PRIO_PROCESS,则who为目标进程的进程ID(PID)。
-
如果which为PRIO_PGRP,则who为目标进程组的进程组ID(PGID)。
-
如果which为PRIO_USER,则who为目标用户的用户ID(UID)。
prio:新的nice值,范围通常为-20到19之间。
返回值:
成功:返回0。
失败:返回-1,并设置errno。
4.2 getpriority函数原型
int getpriority(int which, id_t who);
功能:getpriority函数用于获取进程nice值。
参数:
which:指定要获取nice值的对象,可以是以下值之一:
-
PRIO_PROCESS:用于修改指定进程的优先级。
-
PRIO_PGRP:用于修改指定进程组的优先级。
-
PRIO_USER:用于修改指定用户的所有进程的优先级。
who:指定获取nice值的对象的标识符。
-
如果which为PRIO_PROCESS,则who为目标进程的进程ID(PID)。
-
如果which为PRIO_PGRP,则who为目标进程组的进程组ID(PGID)。
-
如果which为PRIO_USER,则who为目标用户的用户ID(UID)。
返回值:
成功:返回nice值。
失败:返回-1,并设置errno。
4.3 sched_setscheduler函数原型
int sched_setscheduler(pid_t pid, int policy, const struct sched_param *param);
功能:sched_setscheduler函数是Linux系统中用于设置进程调度策略和优先级的系统调用。
参数:
pid:进程ID,0表示当前进程。
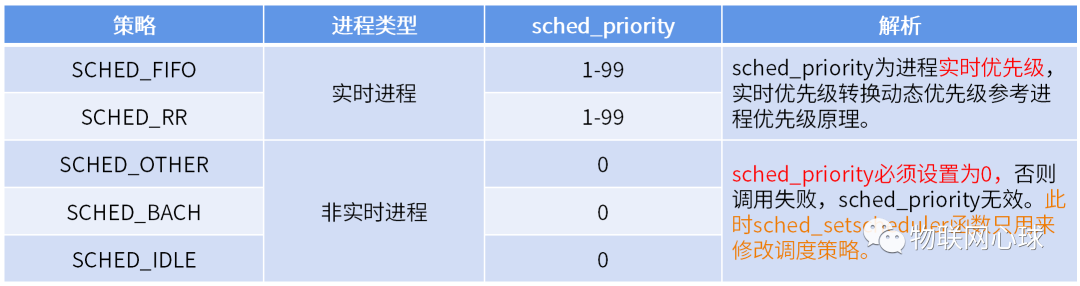
policy:表示要设置的调度策略,常用的调度策略有以下几种选项:
-
SCHED_OTHER:普通进程调度策略。
-
SCHED_FIFO:先进先出调度策略。
-
SCHED_RR:轮转调度策略。
param:是一个指向sched_param结构的指针,用于指定优先级参数。
struct sched_param {
...
int sched_priority;
...
};
返回值:
成功:返回0。
失败:返回-1,并设置errno。
sched_setscheduler使用注意事项:
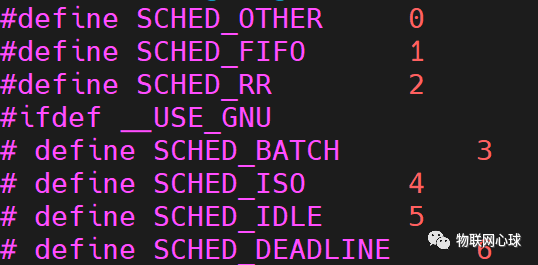
调度策略在内核中的定义:
4.4 sched_getscheduler函数原型
int sched_getscheduler(pid_t pid);
功能:sched_getscheduler函数是Linux系统中的一个于获取指定进程的调度策略。
参数:
pid:进程id,0表示当前进程。
返回值:
成功:返回调度策略:
-
SCHED_OTHER
-
SCHED_FIFO
-
SCHED_RR
-
SCHED_BATCH
-
SCHED_IDLE
失败:返回-1,并设置errno。
4.5 sched_setparam函数原型
int sched_setparam(pid_t pid, const struct sched_param *param);
功能:sched_setparam用于设置进程实时优先级,该函数不能设置调度策略。
参数:
pid:进程id,0表示当前进程。
param:参数sched_setscheduler函数。
返回值:
成功:返回0。
失败:返回-1,并设置errno。
4.6 sched_getparam函数原型
int sched_getparam(pid_t pid, struct sched_param *param);
功能:sched_getparam用于获取指定进程的实时优先级。
参数:
pid:进程id,0表示当前进程。
param:参数sched_setscheduler函数。
返回值:
成功:返回0。
失败:返回-1,并设置errno。

)

)
证书相关)
)



)


 手写笔记)

轴承故障诊断分类(提供故障数据和python代码实现))

报错问题)


