一、坐标系简介
本篇文章介绍:ECEF、ENU、UTM、WGS-84坐标系(LLA)
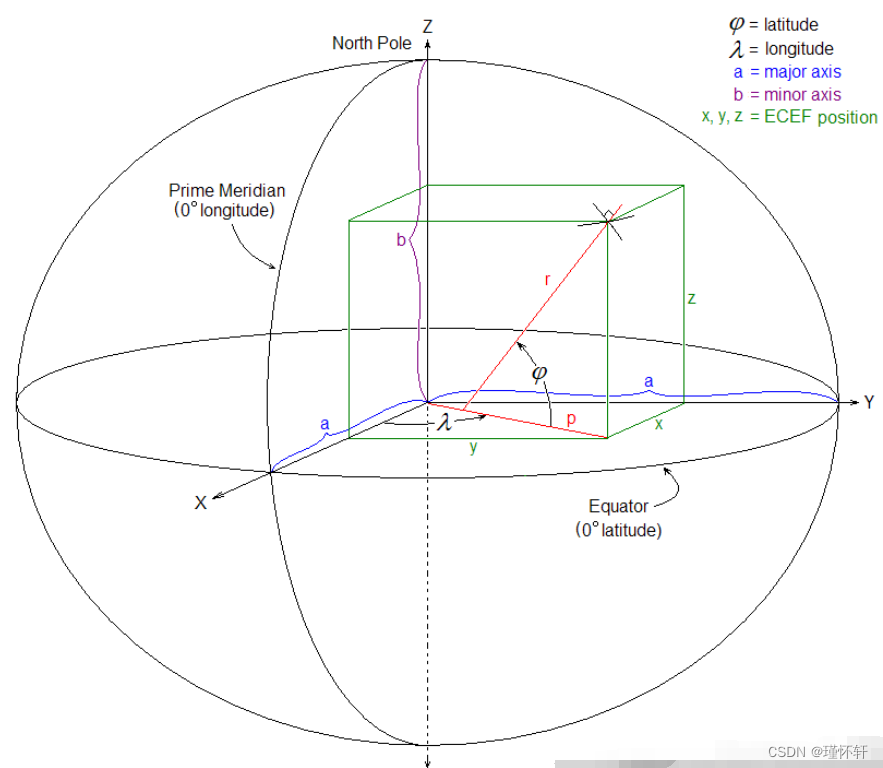
1.1、ECEF坐标系
ECEF坐标系也叫地心地固直角坐标系。
原点:地球的质心,
x轴:原点延伸通过本初子午线(0度经度)和赤道(0维度)的交点。
z轴:原点延伸通过的北极,也就是理想地球旋转轴。
y轴:Z-->X 完成右手定则,穿过赤道和90度经度。如下图所示:
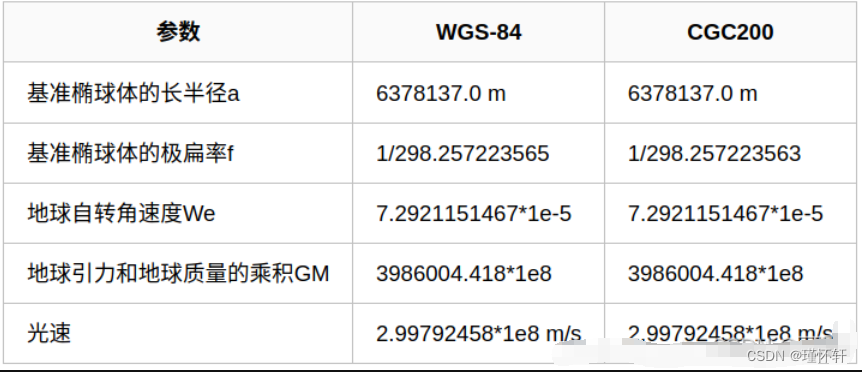
1.2、 WGS-84坐标系(LLA)
WGS-84坐标系也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系),全球地理坐标系、大地坐标系。
特点:最为广泛应用的一个地球坐标系,它给出一点的大地纬度、大地经度和大地高程。更加直观地告诉我们该点在地球中的位置,故又被称作经纬高坐标系。
WGS-84坐标系:
X轴:指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。
Z轴:指向CTP方向。
Y轴:与X、Z轴构成右手坐标系。
其中:
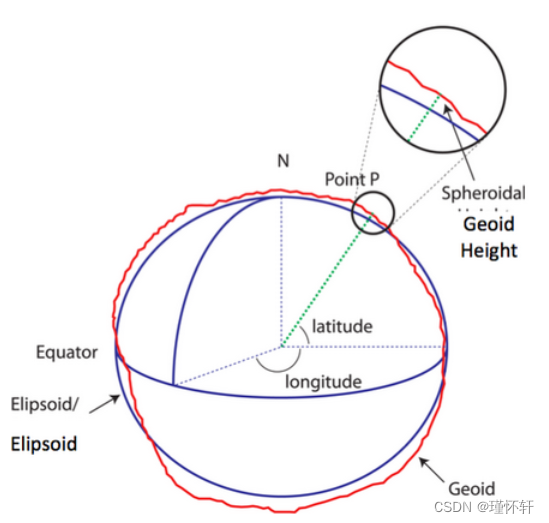
(1)大地纬度是过点P的基准椭球面法线与赤道面的夹角。纬度值在-90°到+90°之间。北半球为正,南半球为负。
(2)大地经度是过点P的子午面与本初子午线之间的夹角。经度值在-180°到+180°之间。
(3)大地高度h是过点P到基准椭球面的法线距离,基准椭球面以内为负,以外为正。
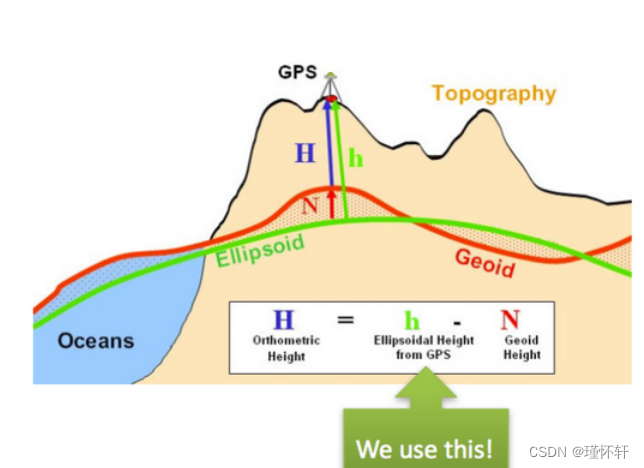
图示可以参照上图,清楚描述ECEF 和 WGS-84的关系。WGS-84和GPS关系参照下图:
1.3、 东北天坐标系(ENU)
东北天坐标系(ENU)也叫站心坐标系以用户所在位置P为坐标原点。
坐标系定义为:
X轴:指向东边
Y轴:指向北边
Z轴:指向天顶
ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,因此一般使用简化后的二维投影坐标系来描述。
二维投影坐标系中 统一横轴墨卡托(The Universal Transverse Mercator ,UTM)坐标系是一种应用较为广泛的一种。
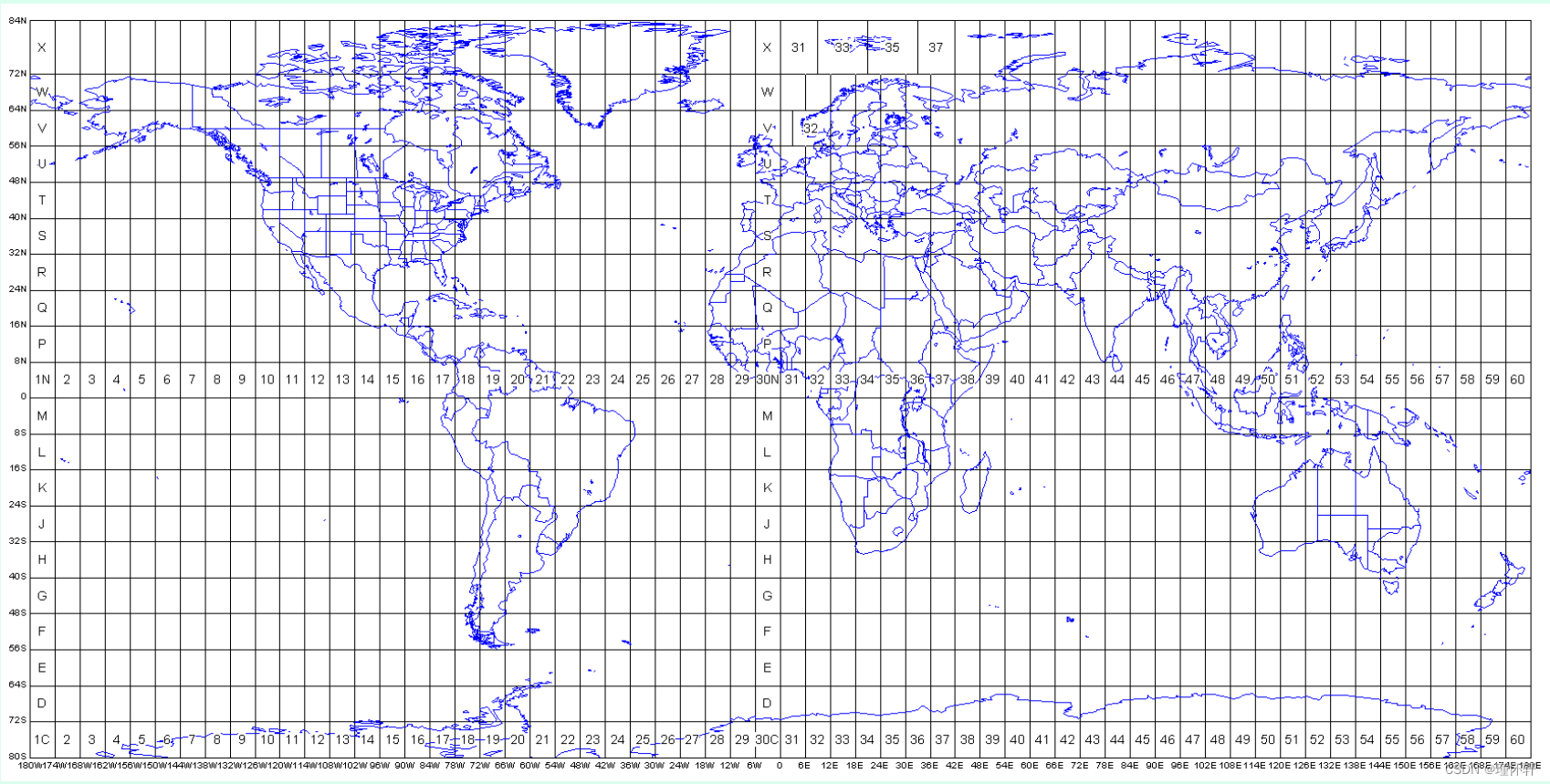
UTM 坐标系统使用基于网格的方法表示坐标,它将地球分为 60 个经度区,每个区包含6度的经度范围,每个区内的坐标均基于横轴墨卡托投影,如下图所示:
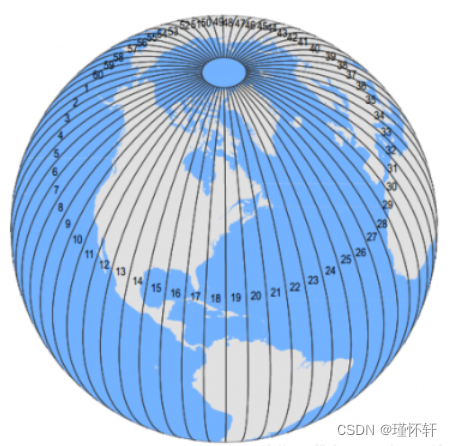
将上图切分后展平得到下图:
DMAP: UTM Grid Zones of the World
根据中国utm分区表,确定所在地区的utm分区,最常用的对照以下表:
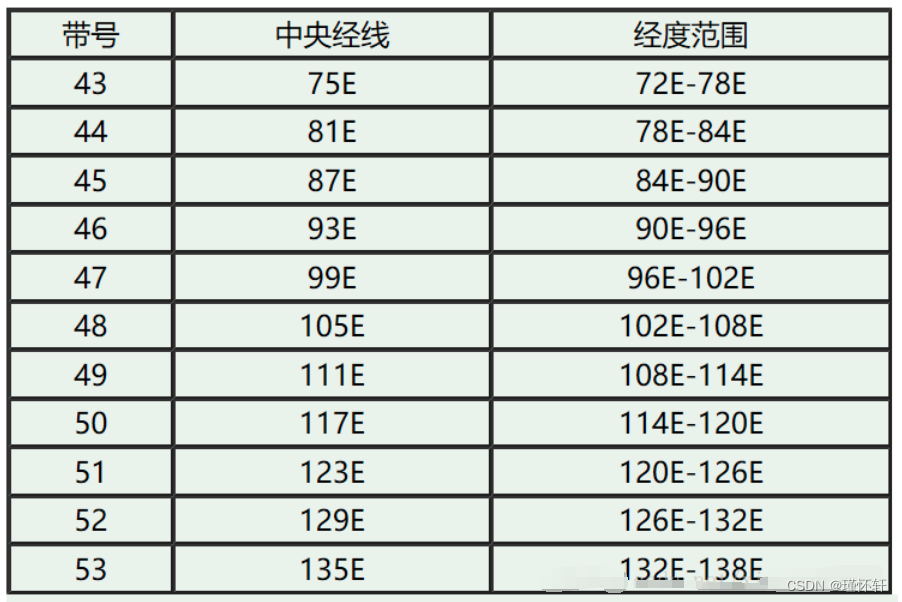
等会坐标转换就可以使用这个图上的分区。
二、坐标转换
2.1、工具介绍
主要使用pyproj工具进行坐标的转换,文档地址:入门 — pyproj 2.1.1 文档
2.2、坐标之间相互转换
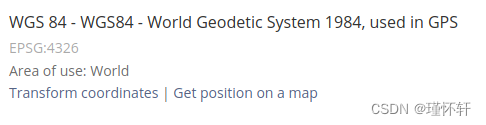
知识前置,我们最常见的的是gps坐标拿到经纬度和海拔信息。gps使用的坐标系为WGS,其编号(EPSG)EPSG:4326 ,这个参数后续要用到
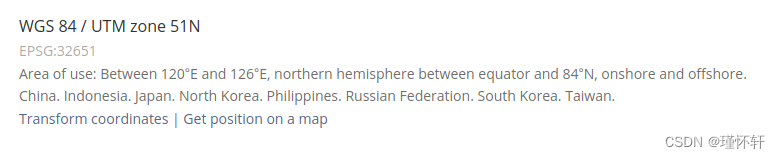
在使用UTM坐标系转化时要弄清处数据在utm分区表中哪一个分区,假设当前经纬信息为【121.398926,31.559815 】可以根据分区表得到北半球51分区,即51N
网站EPSG.io: Coordinate Systems Worldwide 上查询utm分区对应的utm坐标系编码,输入 51N 进行查询,找到对应WGS84 转换前坐标系。得到EPSG:32651
转换原理
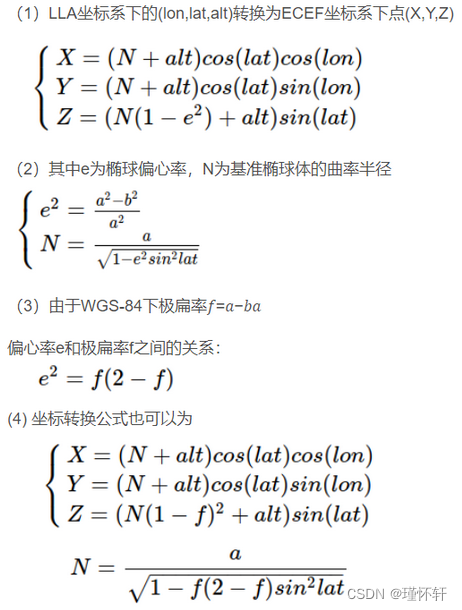
(1) 经纬度坐标系转ECEF
(2)ECEF坐标系转LLA坐标系

start:lon是未知的,假设为0,经过几次迭代之后就能收敛
update公式: alt=(p/cos(lat))-N
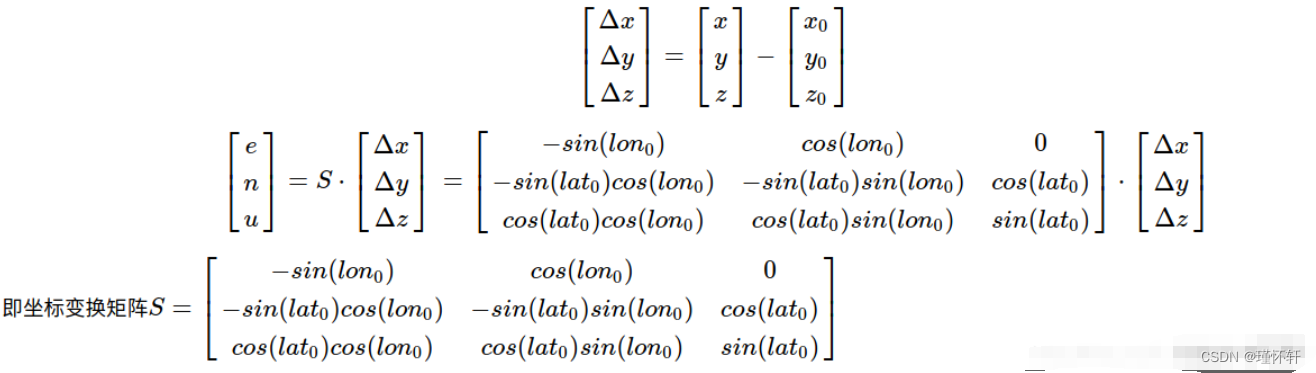
(3)ECEF坐标系转ENU坐标系
用户所在坐标原点𝑃0=(𝑥0,𝑦0,𝑧0),计算点𝑃=(𝑥,𝑦,𝑧)在以点𝑃0为坐标原点的ENU坐标系位置(e,n,u)这里需要用到LLA坐标系的数据,𝑃0的LLA坐标点为𝐿𝐿𝐴0=(𝑙𝑜𝑛0,𝑙𝑎𝑡0,𝑎𝑙𝑡0)
(4)ENU坐标系转ECEF坐标系
上面介绍S为单位正交阵
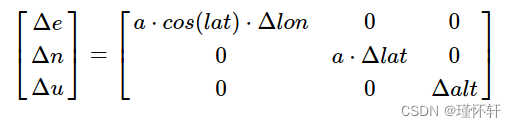
(5)经纬度LLA坐标系直接转ENU坐标系
上述可以看到,从LLA坐标系转换到enu坐标系有较多计算量,在考虑地球偏心率𝑒很小的前提下,可以做一定的近似公式计算
代码实现
(1) 经纬度转UTM坐标
# 经纬度到UTM世界平面坐标系def wgs2utm_51N(lat,lon):crs = pyproj.CRS.from_epsg(4326)crs_cs = pyproj.CRS.from_epsg(32651)transformer = Transformer.from_crs(crs, crs_cs)x, y = transformer.transform(lat, lon)return [x, y](2)UTM转经纬坐标
# 经纬度到UTM世界平面坐标系def utm_51N2wgs(x,y):transformer = Transformer.from_crs("epsg:32651", "epsg:4326")lat, lon = transformer.transform(x, y)return [lat, lon](3)经纬海拔转 地心地固坐标
# 经纬度到地心地固(earth-central, earth-fixed)坐标系def wgs2ecef(lon,lat,alt):ecef = pyproj.Proj(proj='geocent', ellps='WGS84', datum='WGS84')lla = pyproj.Proj(proj='latlong', ellps='WGS84', datum='WGS84')x, y, z = pyproj.transform(lla, ecef, lon, lat, alt,radians=False)return np.array([x, y, z])(4)地心地固转enu坐标
# 用户所在坐标原点Pb=(x0,y0,z0),计算点P=(x,y,z)在以点P0为坐标原点的坐标系位置(e,n,u),# 这里需要用到LLA的数据,P0的LLA坐标点为LLAo=(lon0,lat0,alt0)# 地心地固到东北天坐标系def ecef2enu(self, point0, point):# 转换为弧度lat_r = math.radians(self.lat)lon_r = math.radians(self.lon)line1 = np.array([-math.sin(lon_r), math.cos(lon_r), 0])line2 = np.array([-math.sin(lat_r) * math.cos(lon_r),-math.sin(lat_r) * math.sin(lon_r),math.cos(lat_r)])line3 = np.array([math.cos(lat_r) * math.cos(lon_r),math.cos(lat_r) * math.sin(lon_r),math.sin(lat_r)])trans = np.vstack((line1, line2, line3))difference = point - point0[e, n, u] = np.matmul(trans, np.array(difference).T).Treturn [e, n, u](5)enu转地心地固坐标
def enu2ecef(self, point):# 转换为弧度lat_r = math.radians(self.lat)lon_r = math.radians(self.lon)line1 = np.array([-math.sin(lon_r), math.cos(lon_r), 0])line2 = np.array([-math.sin(lat_r) * math.cos(lon_r),-math.sin(lat_r) * math.sin(lon_r),math.cos(lat_r)])line3 = np.array([math.cos(lat_r) * math.cos(lon_r),math.cos(lat_r) * math.sin(lon_r),math.sin(lat_r)])trans = np.vstack((line1, line2, line3))[B, L, H] = np.matmul(trans.T, point)return [B, L, H](6)enu转imu坐标
# enu空间中的点在惯导坐标系下的坐标,俯仰角绕东轴(x)旋转,横滚角绕北轴(y)旋转,# 航向角绕天轴(z)旋转,这里可以认为简化,只考虑偏航角的情况下# def enu2imu(self, imu_enu, pitch, roll, yaw):def enu2imu(self, imu_enu, yaw, points_enu):Rz = np.array([[math.cos(yaw), -math.sin(yaw), 0],[math.sin(yaw), math.cos(yaw), 0],[0, 0, 1]])T = np.array(-imu_enu)trans = np.hstack((Rz, T))imu_xyz = np.matmul(trans, points_enu)return imu_xyz)








)




:训练一个Glue的RTMDet模型)



汇编指令与机器码转换原理)
