嵌入式-stm32电位器控制LED亮暗
- 任务1
- 代码1
- Key.c
- Key.h
- Timer.c
- Timer.h
- PWM.c
- PWM.h
- main.c
- 实验现象1
- 任务2
- 代码2
- Key.c
- Key.h
- main.c
- 实验现象2
- 问题与解决
- 总结
源码框架取自江协科技,在此基础上做扩展开发。
任务1
本文主要介绍利用stm32f103C8T6实现电位器控制PWM的占空比大小来改变LED亮暗程度,按键实现使用定时器非阻塞式,其中一个按键切换3个LED的控制状态,另一个按键是重置当前的LED为熄灭状态。
代码1
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "oled.h"
#include "PWM.h"
#include "AD.h"
#include "Key.h"
#include <stdio.h>extern uint16_t ADValue; //定义AD值变量
uint8_t Key_Num;
/*** 函 数:按键初始化* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
} // 定义模式枚举
typedef enum { MODE_PWM_CH2 = 0, MODE_PWM_CH3, MODE_PWM_CH4, MODE_MAX
} PWM_MODE; // 全局变量
volatile PWM_MODE currentMode = MODE_PWM_CH2;
volatile uint16_t pwmValue = 0;
volatile uint8_t resetFlag = 0;
volatile uint8_t systemActive = 0; //新增系统激活标志// 初始化显示函数
void Initial_Display(void) { // 清屏 OLED_Clear(); // 显示初始状态 OLED_ShowString(1, 1, "System Ready"); OLED_ShowString(2, 1, "Active KEY1 "); // 初始化时关闭所有LED PWM_SetCompare2(0); PWM_SetCompare3(0); PWM_SetCompare4(0);
} uint8_t Key_GetNum(void)
{uint8_t Temp; Temp = Key_Num; //读取按键键值Key_Num = 0; //清零,防止重复触发return Temp;
}uint8_t Key_GetState(void)
{if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) == 0){return 1;}if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_10) == 0){return 2;}return 0; //无按键按下
}void Key_Tick(void)
{static uint8_t Count; //静态计数器,记录中断次数static uint8_t CurrState, PrevState;Count++;if(Count >= 20) //20ms执行一次按键扫描(中断周期为1ms){Count = 0;PrevState = CurrState; //保存前一次按键状态CurrState = Key_GetState(); //读取当前按键状态//检测按键释放动作(下降沿)if(CurrState == 0 && PrevState != 0){Key_Num = PrevState; //记录按键值(1或者2)}}
}// 设置PWM的函数
void SetPWM(uint16_t value) { switch (currentMode) { case MODE_PWM_CH2: PWM_SetCompare2(value); break; case MODE_PWM_CH3: PWM_SetCompare3(value); break; case MODE_PWM_CH4: PWM_SetCompare4(value); break; }
} // 更新显示模式函数
void Update_ModeDisplay(void) { // 清除原有模式显示 OLED_Clear(); // 根据当前模式显示 switch (currentMode) { case MODE_PWM_CH2: OLED_ShowString(1, 1, "Mode: CH2"); break; case MODE_PWM_CH3: OLED_ShowString(1, 1, "Mode: CH3"); break; case MODE_PWM_CH4: OLED_ShowString(1, 1, "Mode: CH4"); break; } // 显示初始PWM值 OLED_ShowString(2, 1, "PWM: 0");
} /*OLED显示70.5%函数*/
void ShowPwm_Percent(uint8_t Line, uint8_t Colum, uint16_t pwmValue)
{char str[16];uint16_t integer = pwmValue / 10; //整数部分如70uint16_t decimal = pwmValue % 10; //小鼠部分如5sprintf(str, "%4d.%1d%%",integer,decimal);OLED_ShowString(Line,Colum,str);
}// 按键控制函数
void Key_control(void) { uint8_t keyNum = Key_GetNum(); // 处理按键1:模式切换 if (keyNum == 1) { // 重置标志清零 resetFlag = 0; if(systemActive == 0){systemActive = 1;currentMode = MODE_PWM_CH2;Update_ModeDisplay();}else{// 切换模式 currentMode++; if (currentMode >= MODE_MAX) { currentMode = MODE_PWM_CH2; } // 更新模式显示 Update_ModeDisplay(); } } // 处理按键2:重置为全暗 if (keyNum == 2) { // 设置重置标志 resetFlag = 1; // 将当前通道设置为0 SetPWM(0); pwmValue = 0; // 显示PWM值 OLED_ShowNum(2, 5, pwmValue, 3); } // 仅在非重置状态下读取ADC和设置PWM if (resetFlag == 0 && systemActive) { // 读取ADC并设置PWM //uint16_t adcValue = AD_GetValue(); pwmValue = (AD_GetValue() * 1000)/ 4095 ; // 设置当前通道PWM SetPWM(pwmValue); // 显示PWM值 OLED_ShowNum(3, 1, pwmValue, 4); // 直接显示pwmValue的值 ShowPwm_Percent(2, 4, pwmValue);//OLED_ShowNum(2, 5, pwmValue, 3); }
} Key.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);
void Key_control(void);
void Initial_Display(void);
void SetPWM(uint16_t value);
void Key_Tick(void);
uint8_t Key_GetState(void);#endifTimer.c
#include "stm32f10x.h" // Device headervoid Timer_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);TIM_InternalClockConfig(TIM3);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 1000 - 1;TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM3, TIM_FLAG_Update);TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM3, ENABLE);
}/*
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
*/Timer.h
#ifndef __TIMER_H
#define __TIMER_Hvoid Timer_Init(void);#endifPWM.c
#include "stm32f10x.h" // Device header/*** 函 数:PWM初始化* 参 数:无* 返 回 值:无*/void TIM2_PWM_Init(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;GPIO_InitTypeDef GPIO_InitStruct; // 打开定时器2时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO采用复用推挽输出模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_1; //TIM2同时产生三路PWM波 在管脚123 a11GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度50MHZGPIO_Init(GPIOA,&GPIO_InitStruct); //初始化函数 让刚刚配置的参数 输入到对应寄存器里面// 配置定时器2为PWM模式TIM_TimeBaseStructure.TIM_Period = 999; // PWM周期TIM_TimeBaseStructure.TIM_Prescaler = 720; // 72MHz/(71+1) = 1MHz,计数频率为1MHzTIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);// 配置TIM2通道2为PWM模式TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 0; // 初始占空比0%TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC2Init(TIM2, &TIM_OCInitStructure);TIM_OC3Init(TIM2, &TIM_OCInitStructure);TIM_OC4Init(TIM2, &TIM_OCInitStructure);// 使能TIM2TIM_Cmd(TIM2, ENABLE);
}
/*** 函 数:PWM设置CCR* 参 数:Compare 要写入的CCR的值,范围:0~1000* 返 回 值:无* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比* 占空比Duty = CCR / (ARR + 1)*/void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM2 ,Compare ); //设置CCR1的值
}
void PWM_SetCompare3(uint16_t Compare)
{TIM_SetCompare3(TIM2 ,Compare ); //设置CCR1的值
}
void PWM_SetCompare4(uint16_t Compare)
{TIM_SetCompare4(TIM2 ,Compare ); //设置CCR1的值
}PWM.h
#ifndef __PWM_H
#define __PWM_Hvoid TIM2_PWM_Init(void);void PWM_SetCompare2(uint16_t Compare);
void PWM_SetCompare3(uint16_t Compare);
void PWM_SetCompare4(uint16_t Compare);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
#include "sys.h"
#include "AD.h"
#include "PWM.h"
#include "Timer.h"/*全局变量*/
uint16_t ADValue; //定义AD值变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化Key_Init(); //按键初始化AD_Init(); //AD初始化TIM2_PWM_Init(); //定时器2PWM初始化Timer_Init();/*OLED显示静态字符*/Initial_Display();while (1){//KeyNum=Key_GetNum(); //获取键码值Key_control(); //按键PWM控制}
}//中断服务函数
//每次TIM3溢出时触发中断,调用Key_Tick()进行按键扫描
//清除中断标志,避免重复进入中断
void TIM3_IRQHandler(void)
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET){Key_Tick();TIM_ClearITPendingBit(TIM3, TIM_IT_Update);}
}实验现象1
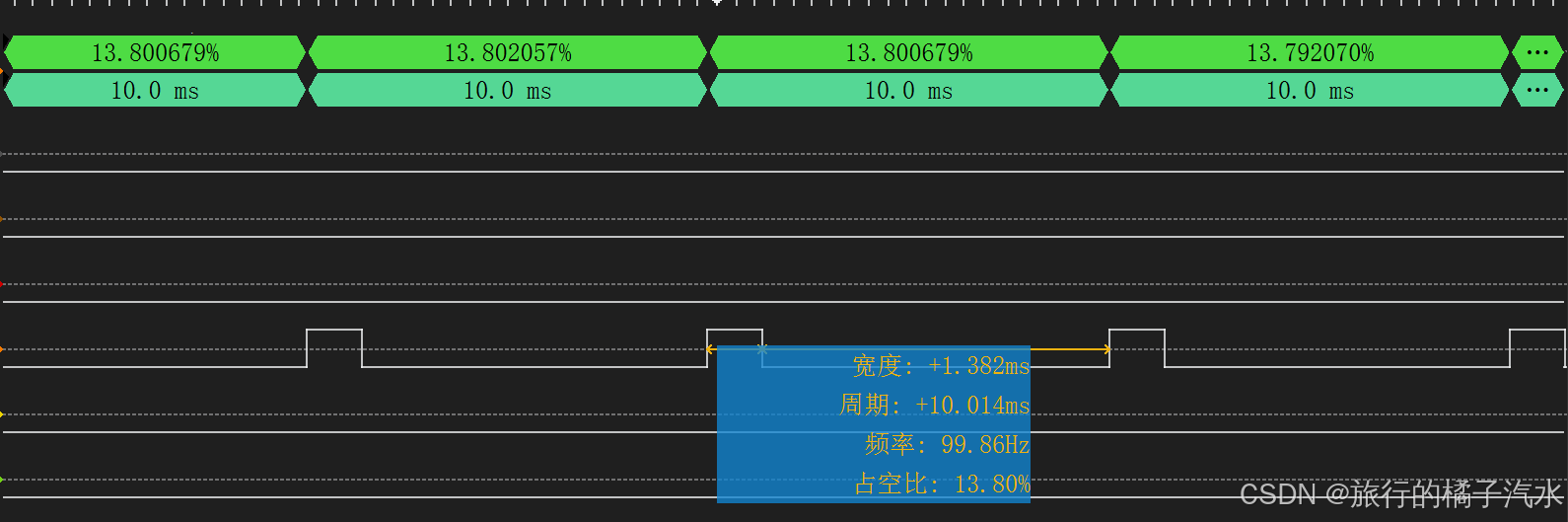
以下是通过电位器控制PWM输出大小的值进而调暗LED

通过网盘分享的文件:电位器改变PWM输出控制LED
链接: https://pan.baidu.com/s/1JrevfJ2GTsBqLyRb4Do39g 提取码: 6688

任务2
旋转编码器控制LED亮暗:
1、LED亮度控制:旋转编码器调节PWM占空比,控制LED亮度。
2、状态显示:OLED实时显示当前PWM占空比(格式为XX.X%)。
3、模式切换:通过独立按键切换PWM输出通道(如CH2、CH3、CH4)。
4、系统激活与重置:按键控制系统的启动和重置。
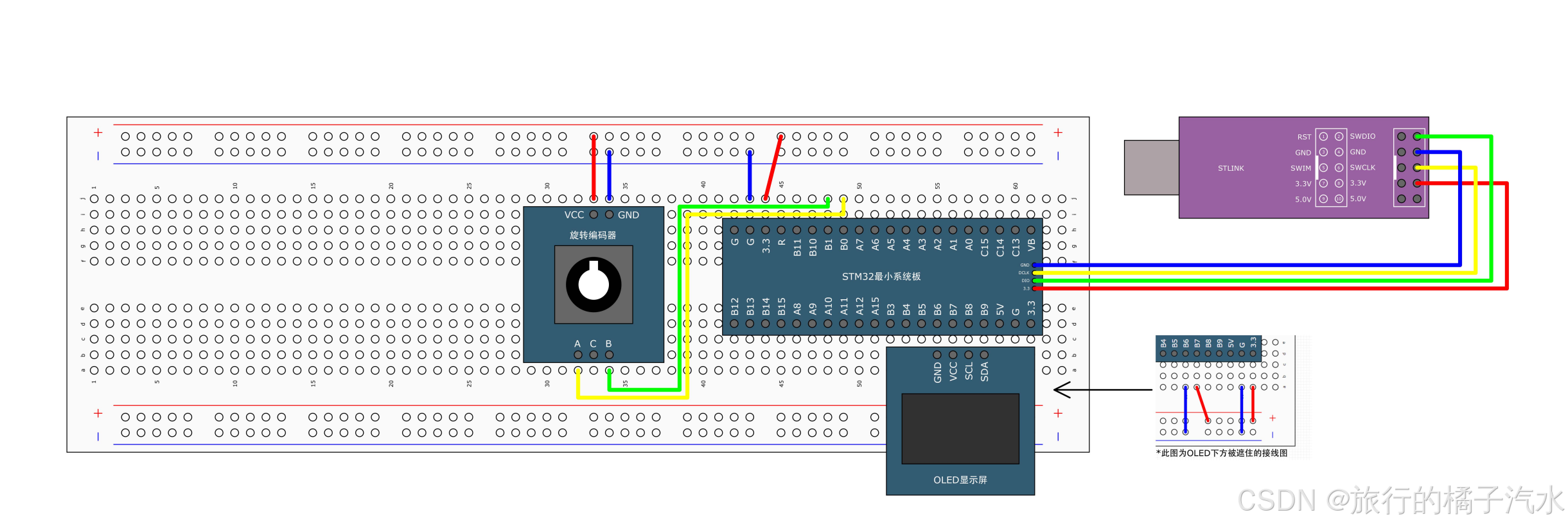
接线图片来自江协议科技
代码2
1、模块化代码架构
编码器驱动:通过外部中断检测旋转方向,更新计数值。
PWM生成:配置定时器(如TIM2)的PWM模式,动态调节占空比。
OLED显示:格式化显示占空比和模式信息。
主控制逻辑:整合按键、编码器和PWM功能,实现状态机控制。
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "oled.h"
#include "PWM.h"
#include "AD.h"
#include "Key.h"
#include "Encoder.h"
#include <stdio.h>uint8_t Key_Num;
signed Key_Encoder_Count = 0;
/*** 函 数:按键初始化* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
} // 定义模式枚举
typedef enum { MODE_PWM_CH2 = 0, MODE_PWM_CH3, MODE_PWM_CH4, MODE_MAX
} PWM_MODE; // 全局变量
volatile PWM_MODE currentMode = MODE_PWM_CH2;
volatile uint16_t pwmValue = 0;
volatile uint8_t resetFlag = 0;
volatile uint8_t systemActive = 0; //新增系统激活标志// 初始化显示函数
void Initial_Display(void) { // 清屏 OLED_Clear(); // 显示初始状态 OLED_ShowString(1, 1, "System Ready"); OLED_ShowString(2, 1, "Active KEY1 "); // 初始化时关闭所有LED PWM_SetCompare2(0); PWM_SetCompare3(0); PWM_SetCompare4(0);
} uint8_t Key_GetNum(void)
{uint8_t Temp; Temp = Key_Num; //读取按键键值Key_Num = 0; //清零,防止重复触发return Temp;
}uint8_t Key_GetState(void)
{if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) == 0){return 1;}if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_10) == 0){return 2;}return 0; //无按键按下
}void Key_Tick(void)
{static uint8_t Count; //静态计数器,记录中断次数static uint8_t CurrState, PrevState;Count++;if(Count >= 20) //20ms执行一次按键扫描(中断周期为1ms){Count = 0;PrevState = CurrState; //保存前一次按键状态CurrState = Key_GetState(); //读取当前按键状态//检测按键释放动作(下降沿)if(CurrState == 0 && PrevState != 0){Key_Num = PrevState; //记录按键值(1或者2)}}
}// 设置PWM的函数
void SetPWM(uint16_t value) { switch (currentMode) { case MODE_PWM_CH2: PWM_SetCompare2(value); break; case MODE_PWM_CH3: PWM_SetCompare3(value); break; case MODE_PWM_CH4: PWM_SetCompare4(value); break; }
} // 更新显示模式函数
void Update_ModeDisplay(void) { // 清除原有模式显示 OLED_Clear(); // 根据当前模式显示 switch (currentMode) { case MODE_PWM_CH2: OLED_ShowString(1, 1, "Mode: CH2"); break; case MODE_PWM_CH3: OLED_ShowString(1, 1, "Mode: CH3"); break; case MODE_PWM_CH4: OLED_ShowString(1, 1, "Mode: CH4"); break; } // 显示初始PWM值 OLED_ShowString(2, 1, "PWM: 0");
} /*OLED显示70.5%函数*/
void ShowPwm_Percent(uint8_t Line, uint8_t Colum, uint16_t pwmValue)
{char str[16];uint16_t integer = pwmValue / 10; //整数部分如70uint16_t decimal = pwmValue % 10; //小鼠部分如5sprintf(str, "%4d.%1d%%",integer,decimal);OLED_ShowString(Line,Colum,str);
}// 按键控制函数
void Key_control(void) { uint8_t keyNum = Key_GetNum(); // 处理按键1:模式切换 if (keyNum == 1) { // 重置标志清零 resetFlag = 0; if(systemActive == 0){systemActive = 1;currentMode = MODE_PWM_CH2;Update_ModeDisplay();}else{// 切换模式 currentMode++; if (currentMode >= MODE_MAX) { currentMode = MODE_PWM_CH2; } // 更新模式显示 Update_ModeDisplay(); } } // 处理按键2:重置为全暗 if (keyNum == 2) { // 设置重置标志 resetFlag = 1; // 将当前通道设置为0 SetPWM(0); pwmValue = 0; // 显示PWM值 OLED_ShowNum(2, 5, pwmValue, 3); } // 仅在非重置状态下读取ADC和设置PWM if (resetFlag == 0 && systemActive) { Key_Encoder_Count += Encoder_Get();if(Key_Encoder_Count < 0){Key_Encoder_Count = 0;}if(Key_Encoder_Count > 100){Key_Encoder_Count = 100;}pwmValue = (Key_Encoder_Count * 10) ; // 设置当前通道PWM SetPWM(pwmValue); // 显示PWM值 OLED_ShowNum(3, 1, pwmValue, 4); // 直接显示pwmValue的值 ShowPwm_Percent(2, 4, pwmValue);//OLED_ShowNum(2, 5, pwmValue, 3); }
} Key.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);
void Key_control(void);
void Initial_Display(void);
void SetPWM(uint16_t value);
void Key_Tick(void);
uint8_t Key_GetState(void);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
#include "sys.h"
#include "AD.h"
#include "PWM.h"
#include "Timer.h"
#include "Encoder.h"int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化Key_Init(); //按键初始化TIM2_PWM_Init(); //定时器2PWM初始化Timer_Init();Encoder_Init();/*OLED显示静态字符*/Initial_Display();while (1){Key_control(); //按键PWM控制}
}//中断服务函数
//每次TIM3溢出时触发中断,调用Key_Tick()进行按键扫描
//清除中断标志,避免重复进入中断
void TIM3_IRQHandler(void)
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET){Key_Tick();TIM_ClearITPendingBit(TIM3, TIM_IT_Update);}
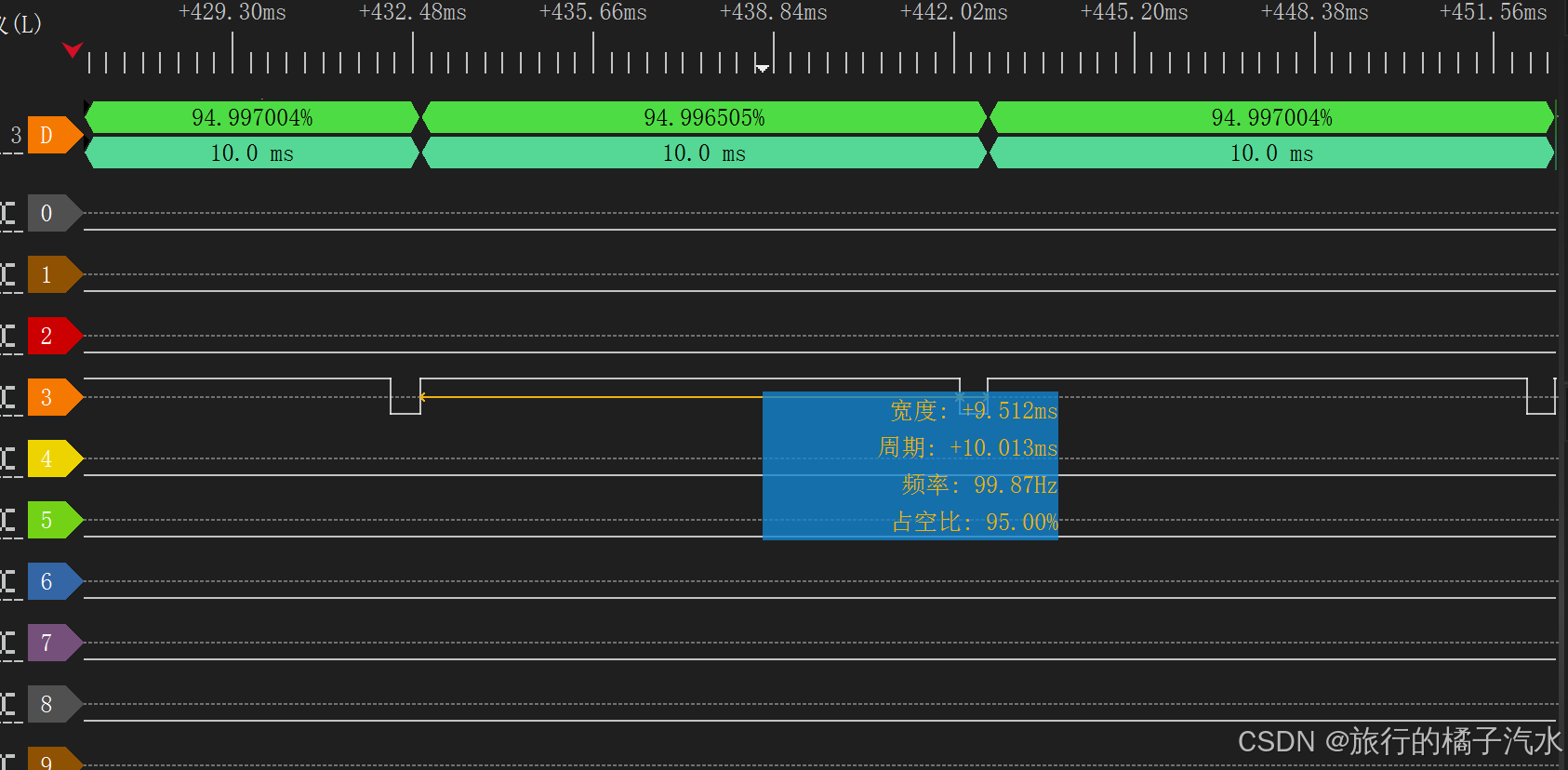
}实验现象2

问题与解决
一上电程序卡死,原因是Timer3的中断服务函数忘记清除相应的标志位。
总结
旋转编码器和电位器控制LED亮暗的区别
 核心逻辑在于旋转编码器时中断服务函数检测旋转方向,更新计数值,而电位器时ADC采样。
核心逻辑在于旋转编码器时中断服务函数检测旋转方向,更新计数值,而电位器时ADC采样。


)


及相关算法题目)












模拟娱乐篇11)
