Go语言入门之Map详解
1.基础定义
map是一个无序的,k-v键值对格式的集合
(1)特点
- 类型特点:map为引用类型,所以在函数中更新value值会永久改变
- 顺序特点:map的遍历是无序的,因为底层是哈希表,哈希表无序
- 初始化使用:0值或者未初始化值为nil,未初始化不可赋值使用,否则直接panic
- 键值对:key和value总是成对出现,key是唯一的,可以是任何可比较类型
- 动态性:可以在运行时动态地增加或删除键值对,而不需要预先声明大小
- 快速查找:map提供了快速查找、插入和删除操作,平均时间复杂度O(1)
- 并发:非线程安全的,保证安全需要加锁
(2)定义声明
var name map[key_type]value_type
- name:变量名
- key_type:键的类型
- value_type:值的类型
// 方式一
var m map[int]string = map[int]string{}// 方式二
m := map[int]string{1 : "老一",2 : "老二",3 : "老三",
}// 方式三:5代表容量,也就是在内存中占用多大的空间,可以省略
m := make(map[int]string,5)
2.基本使用
(1)添加元素
- 1.最常见的就是通过字面量声明map的时候进行添加,如上方式2
- 2.其次是直接给指定键设置对应的值
mapName[key] = value// 假设map名为m,key为int,value为string
m[5] = "老五"
(2)删除元素
根据键删除元素,删除不存在的key也不会报错
delete(mapName, key) // 假设map名为m,key为int,value为string
delete(m, 5)
(3)修改元素
修改直接修改指定键对应的值就可以
mapName[key] = newValue // 假设map名为m,key为int,value为string
m[5] = "五"
(4)获取元素
根据键获取值,ok 为是否找到的标志位,类型为布尔
如果未找到值,不会报错,会返回对应类型的空值
value, ok := mapName[key]
if !ok {fmt.Println(ok)}
(5)遍历所有元素
注意:map的遍历是无序的
for key, value := range myMap {// 处理每对键值
}// 例子
for i, s := range m {fmt.Println(i, s)}
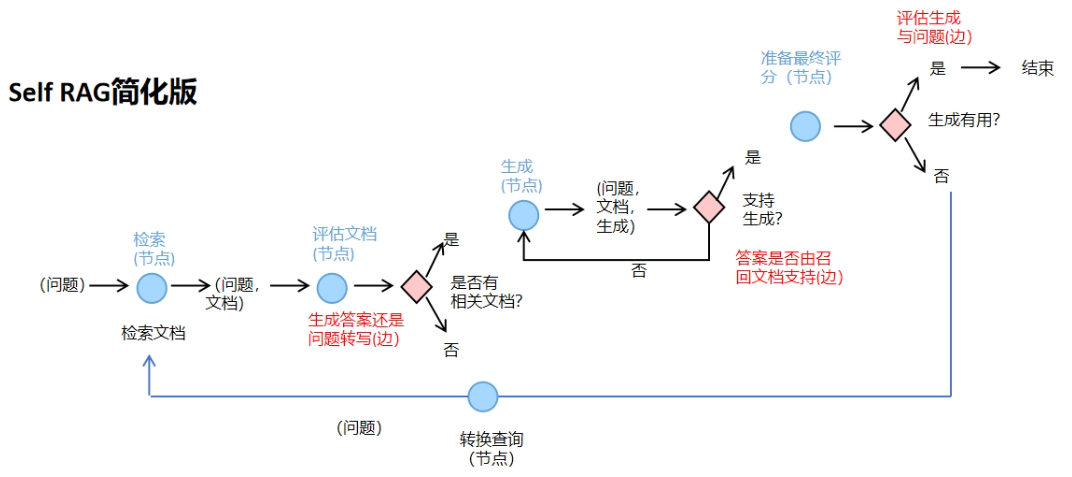
3.底层原理
golang语言的map底层本质是用
hashmap进行实现的,所以map本质上是哈希表。
哈希表是一种使用哈希函数组织数据,以支持快速插入和搜索的数据结构。
哈希函数,又名散列函数,是一种将任意长度的输入(如字符串)通过特定的散列算法,变换成固定长度的输出的函数。通常会使用类似数组的形式来存储哈希值,从而保证哈希值的访问性能。
如果输入的范围超出映射输出的范围,就可能会导致不同的输入得到相同的输出,这就是
哈希冲突。解决这种问题通常两种方式:
开放地址法和拉链法
(1)map的实现方案
开放地址法:
通常使用数组实现数据结构
- 1.首先数组是由不同的哈希值组成,称为哈希表
- 2.然后进行很多键,进行哈希函数确认地址放入相应位置,如果哈希表的这个槽位已经被占用,使用探测序列(如线性探测、二次探测或双重散列等)来找到下一个可用的槽位,并将冲突的键存储在那里。
缺点:
这种方法要求更多的空间来解决冲突,因为不仅要存储数据,还需要额外的空间来解决碰撞。
拉链法(go语言的map使用了该方法):
通常使用数组和链表作为底层数据结构
- 1.首先数组是由不同的哈希值组成,称为哈希表,哈希表每个槽位都将存储一个链表
- 2.然后会进来许多键,不同键进行hash后,求模算出hash值,链接到数组上,哈希值相同的情况(哈希碰撞),新进来的键就会挂在已有键链表的后面
- 3.当需要查找特定键时,首先使用哈希函数确定其位置,然后在该位置的链表上进行线性搜索,直到找到匹配的键或者达到链表的末尾。
数组不同索引处链接的链表也被称之为桶(Bucket)
(2)map的底层结构
hmap
type hmap struct {count int // 当前哈希表中的元素数量,即键值对数量,可用内置函数len()获取flags uint8 // 标志位,标记map状态和属性的字段,如正在迭代等状态B uint8 // 表示哈希表桶(buckets)的数量为2的B次方noverflow uint16 // 溢出桶的大致数量,扩容时会用到hash0 uint32 // 哈希种子,对key做哈希是加入种子计算哈希值,确保map安全性buckets unsafe.Pointer // 存储桶数组的指针oldbuckets unsafe.Pointer // 扩容时用于保存旧桶数组的指针 , 大小为新桶数组的一半nevacuate uintptr // 扩容时的迁移进度器,迁移桶下标小于此值说明完成迁移extra *mapextra // 溢出桶的指针,指向mapextra结构体,用于存储一些额外的字段和信息
}
// mapextra 处理桶溢出的结构体
type mapextra struct {overflow *[]*bmap // 溢出桶数组指针,仅当key和elem非指针时才使用oldoverflow *[]*bmap // 旧的溢出桶数组指针,仅当key和elem非指针时才使用nextOverflow *bmap // 下一个可用的溢出桶地址
}bmap
在源码中,bmap类型只有一个tophash字段。但在编译时期,Go编译器会根据用户代码自动注入相应的key,value等结构
表面的bmap
type bmap struct {// tophash generally contains the top byte of the hash value// for each key in this bucket. If tophash[0] < minTopHash,// tophash[0] is a bucket evacuation state instead.tophash [bucketCnt]uint8// Followed by bucketCnt keys and then bucketCnt elems.// NOTE: packing all the keys together and then all the elems together makes the// code a bit more complicated than alternating key/elem/key/elem/... but it allows// us to eliminate padding which would be needed for, e.g., map[int64]int8.// Followed by an overflow pointer.
}实际的bmap
// 编译期间会动态地创建一个新的结构:
type bmap struct {topbits [8]uint8 // 这里存储哈希值的高八位,用于在确定key的时候快速试错,加快增删改查寻址效率,有时候也叫tophashkeys [8]keytype // 存储key的数组,这里bmap最多存储8个键值对elems [8]valuetype // 存储value的数组,这里bmap也最多存储8个键值对...overflow uintptr // 溢出桶指针
}map底层图解

map的扩容
在go语言中,map的扩容是自动进行的,用于维护map的性能
首先,map在写入时会通过runtime.mapassign判断是否需要扩容
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
...// If we hit the max load factor or we have too many overflow buckets,// and we're not already in the middle of growing, start growing.if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {hashGrow(t, h)goto again // Growing the table invalidates everything, so try again}
...
}// overLoadFactor reports whether count items placed in 1<<B buckets is over loadFactor.
func overLoadFactor(count int, B uint8) bool {return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {if B > 15 {B = 15}return noverflow >= uint16(1)<<(B&15)
}根据上面代码判断扩容有下面两个条件:
- 负载因子超过阈值6.5:
overLoadFactor(h.count+1, h.B), 负载因子 = 元素数量÷桶数量 - 使用了太多溢出桶(超出32768):
tooManyOverflowBuckets(h.noverflow, h.B))
扩容方式:
- 增量扩容:
当负载因子过大时,就新建一个bucket,新的bucket长度是原来的2倍,然后旧bucket数据搬迁到新的bucket。
- 等量扩容
数据不多,但是溢出桶太多。扩容时buckets数量不变,重新做一遍类似增量扩容的搬迁动作,把松散的键值对重新排列一次,以使bucket的使用率更高,进而保证更快的存取
扩容步骤:
- 1.新桶数组:新建一个大小为原来两倍的新的桶数组,map会标记为扩容状态。
func hashGrow(t *maptype, h *hmap) {...// 原有桶设置给oldbucketsoldbuckets := h.buckets // 创建新桶newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil)flags := h.flags &^ (iterator | oldIterator)if h.flags&iterator != 0 {flags |= oldIterator}// commit the grow (atomic wrt gc)h.B += biggerh.flags = flagsh.oldbuckets = oldbucketsh.buckets = newbucketsh.nevacuate = 0h.noverflow = 0...
}- 2.重新哈希:用oldbuckets指向原来的桶数组,buckets指向新的桶数组,遍历旧的桶数组中的所有键值对,并使用哈希函数重新计算每个键的位置,将它们插入到新的桶数组中。
// 这个是mapdelete函数中的处理迁移的位置
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
...if h.growing() {// growWork(t, h, bucket)}
...
}- 3.逐步迁移:为了避免在扩容时暂停整个程序,Go的Map实现可能会选择
渐进式驱逐进行迁移键值对。这意味着在扩容期间,旧的桶数组和新的桶数组会同时存在,新插入的键值对会直接放入新的桶中,而对旧桶的访问会触发迁移操作。
// 进入后是一个简单的判断,之后的evacuate是核心逻辑处理,特别多,感兴趣自己看源码
func growWork(t *maptype, h *hmap, bucket uintptr) {// make sure we evacuate the oldbucket corresponding// to the bucket we're about to useevacuate(t, h, bucket&h.oldbucketmask())// evacuate one more oldbucket to make progress on growingif h.growing() {evacuate(t, h, h.nevacuate)}
}- 4.更新内部状态:当oldbuckets中的键值对全部搬迁完毕后,Map的内部状态会更新,删除oldbuckets。
4.使用场景
- 1.快速查找:当需要快速根据键查找值时,Map提供了平均时间复杂度为O(1)的查找性能。
- 2.去重:当需要存储唯一键时,Map的键不允许重复,自然可以实现去重功能。
- 3.动态集合:当需要动态地添加或删除键值对时,Map提供了灵活的操作。
- 4.关联数据:当数据以键值对的形式存在,并且需要经常更新或查询时,Map是一个很好的选择。
5.使用建议
- 预分配:尽量使用make函数对已知大小的map分配容量
- 数据类型选择:使用较大的数据类型,如
int或int64。 - 指针存值:对数据量大的结构体或者变量尽量使用指针传值存值
- 并发控制:对于并发访问,使用
sync.Map或自行实现的并发安全Map。
6.参考资料
- https://cloud.tencent.com/developer/article/2400014
- https://blog.csdn.net/qq_35289736/article/details/137480760/
- https://zhuanlan.zhihu.com/p/675715169/







![[k8s源码]1.client-go集群外部署](https://i-blog.csdnimg.cn/direct/41d669b72c0144e59ade88107a40d5f3.png)

![[Linux][Shell][Shell逻辑控制]详细讲解](https://i-blog.csdnimg.cn/direct/730ecebffc184780a28da2a79dfafd7d.png)