之前用过51做过一个垃圾桶的小项目,这里用32重新搞了一下。视频的效果和之前一样,可参考这个垃圾桶效果 。
一、项目描述(同51)
项目主要是模拟不用手动打开垃圾桶盖,而进行自动操作。自动打开的条件如下:
- 1、垃圾桶检测到有人靠时自动打开桶盖
- 2、发生震动时会自动打开
- 3、可以手动按下按钮打开
二、项目用到的模块(同51)
- HC-SR04(超声波模块)
- SG90(舵机模块)
- MH-sensor-series(振动传感器)
- 蜂鸣器,一个指示灯
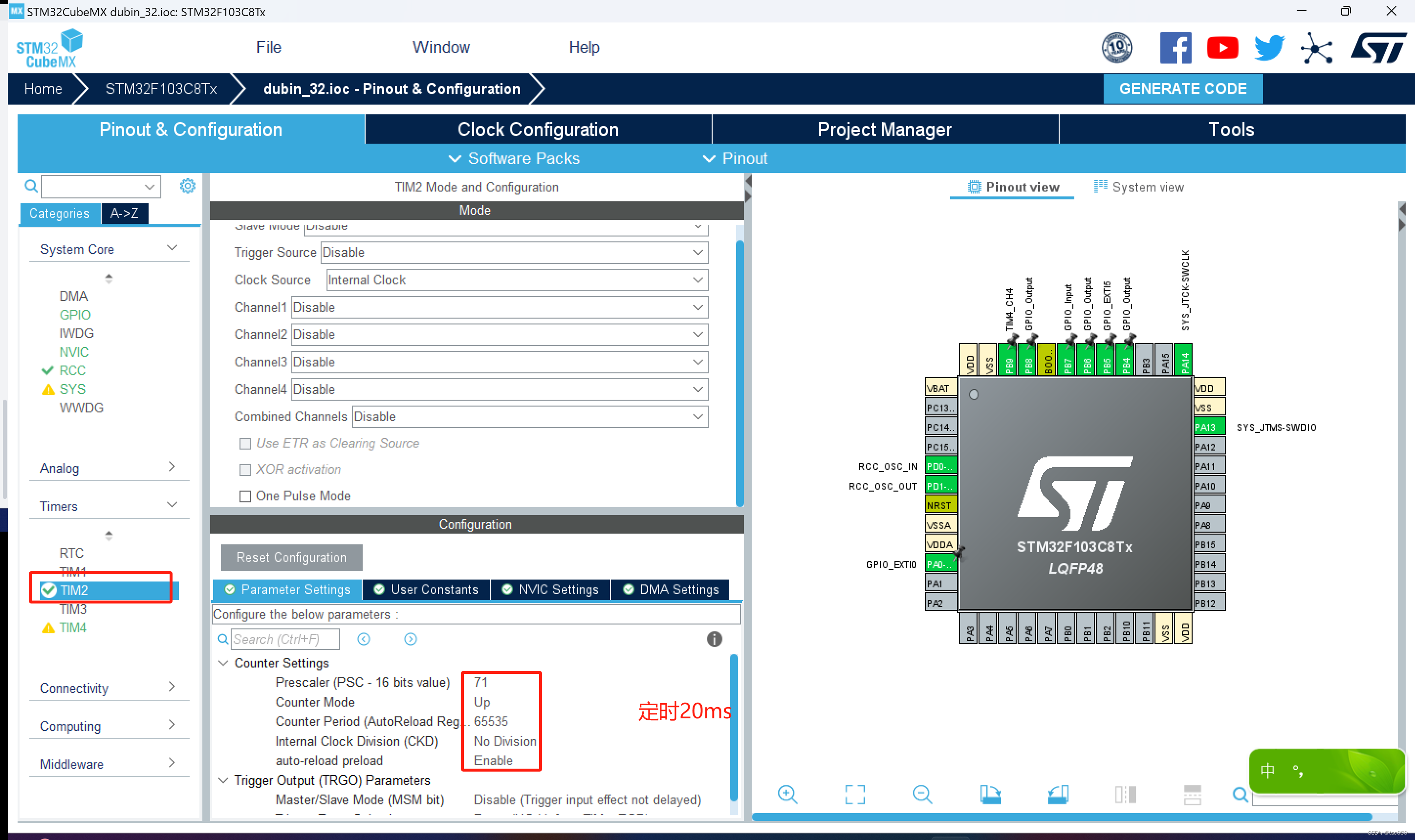
三,模拟引脚配置说明
- HC-SR04:trig <---> PB6(output), echo <---> PB7(input),TIM2 用于定时
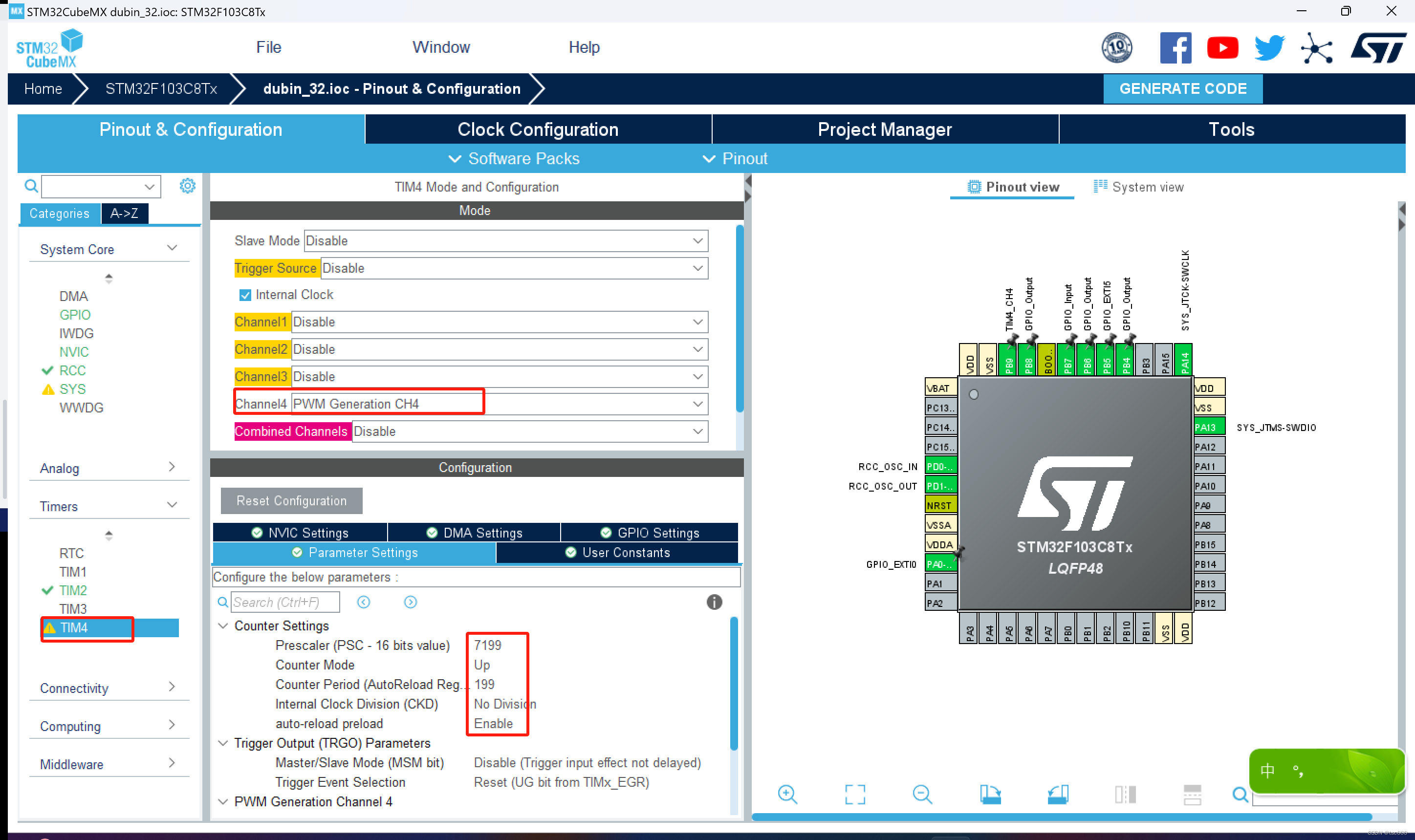
- SG90:PWM(黄色线) <---> PB9(TIM_CH4)
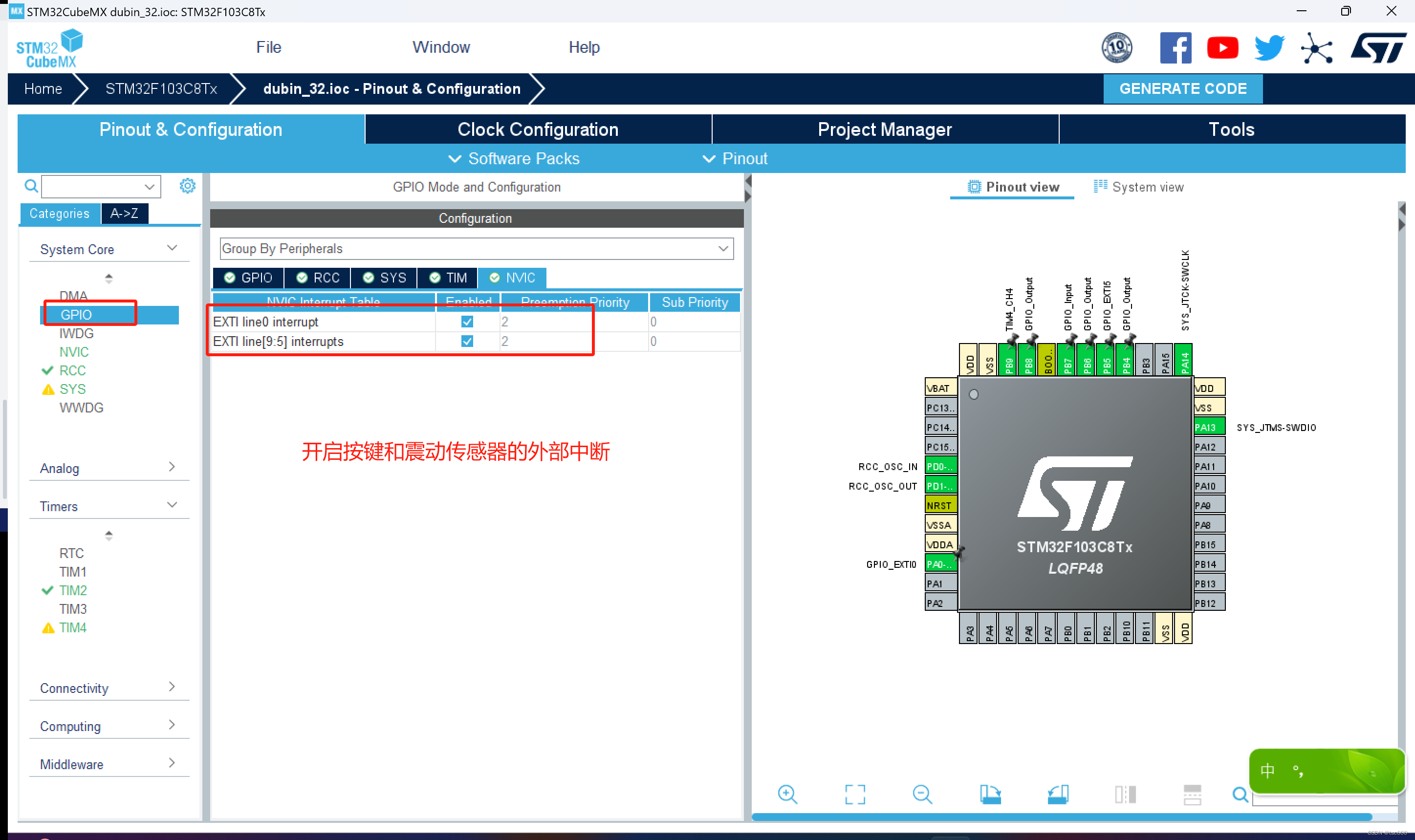
- MH-sensor-series: D0<--->PB5(外部中断)
- key: PA0(外部中断)
- led1: PB8
下面是大致的配置说明
四、代码
完整代码
main函数主要代码如下:
int opened = 0;//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}double getDistance() {int count = 0;HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);HAL_TIM_Base_Stop(&htim2);count = __HAL_TIM_GetCounter(&htim2);return 340 * 0.000001 * count * 100 / 2;
}void beep() {HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);HAL_Delay(100);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_SET);
}/* sg90 -----------------------------------------------*/void initSG90() {HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);
}void openDusbin() {__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15);HAL_Delay(2000);
}void closeDusbin() {__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);opened = 0;HAL_Delay(150);
}/* led -----------------------------------------------*/
void openStausLight() {HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
}void closeStausLight() {HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
}void tryToOpenDusbin() {if(opened) {HAL_Delay(2000);return;}opened = 1;beep();openDusbin();
}void tryToCloseBusbin() {opened = 0;closeDusbin();
}/* key exti -----------------------------------------------*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {if(GPIO_Pin == GPIO_PIN_0 || GPIO_Pin == GPIO_PIN_5) {if(HAL_GPIO_ReadPin(GPIOA, GPIO_Pin) == GPIO_PIN_SET|| HAL_GPIO_ReadPin(GPIOB, GPIO_Pin) == GPIO_PIN_RESET) {openStausLight();tryToOpenDusbin();}}
}int main(void)
{double distance;HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_TIM4_Init();MX_TIM2_Init();initSG90();HAL_NVIC_SetPriority(SysTick_IRQn,0,0);while (1){distance = getDistance();if(distance < 10) {openStausLight();tryToOpenDusbin();} else {closeStausLight();tryToCloseBusbin();}HAL_Delay(100);}
}问题点记录:
1、CubeMX生成的注释不要手贱随便删除,否则如果配置更改了,重新利用CubeMx生成代码,可能会把之前的代码给删除了。
2、将stm32 滴答定时器的优先调高(项目里调到最高,默认15最低),同时把外部中断的优先级降低(项目里设置成2,默认是0最高),否则会造成卡死
3、一个函数的功能不做过于集中,比如项目中的openDusbin,拆成了tryToOpenDusbin(可以加些业务逻辑)+ openDusbin.
4、keil5 问题,光标输入错乱,F12进不了代码,关闭重新打开工程(O(∩_∩)O哈哈~)

摘要)

 成像--附C++与Python的实现源码)




)
笔记14_备份与恢复(中))









