兄弟们整理和收集资料不容易,请关注手册!!
Potree 以其高显示速度而脱颖而出,使其成为处理大量点云数据集的绝佳选择。
我们的重点将是 Potree 提供的多样化导航和显示选项。
如果你遇到任何问题,请随时尝试其他浏览器或探索 Potree 桌面版本,根据我的经验,我发现它可以提供令人满意的结果。
1、介绍
如果你还没有点云并希望获取点云,我建议使用 Geotiles 获取来自荷兰的数据,使用 LiDAR HD 获取来自法国的数据,或者使用 3DE 程序获取来自美国的数据。 这些来源提供了可用于你的项目的有价值的点云数据。 但是,如果你已经拥有自己的数据,那就更好了,因为它允许你使用根据你的需求定制的熟悉的数据集。 你还可以仅在浏览器中操作一些 Potree 示例(Entwine 和 Potree)。
在本演示中,我在法国蒙彼利埃下载了 4 个 LiDAR HD 图块,然后将它们导入到 Potree Desktop 中。
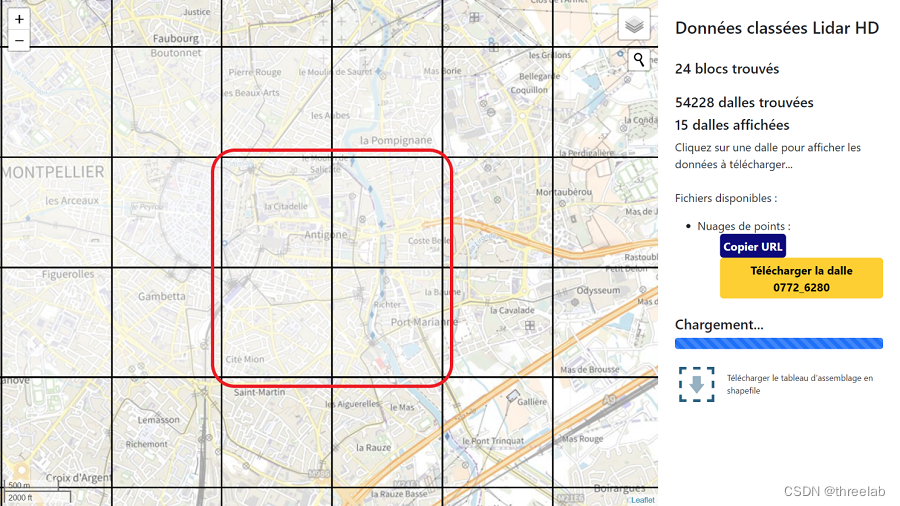
法国蒙彼利埃市上空的 4 块 LiDAR HD @LiDAR HD
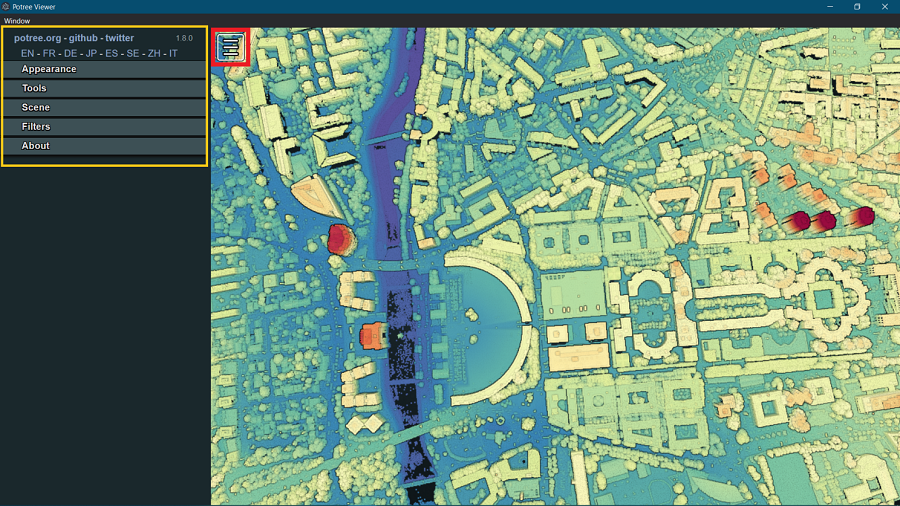
访问 Potree 界面后,你会注意到在生成 Potree 文件期间指定的默认设置。 这些文件由数据文件、HTML 和脚本组成,由 Web 服务器或 Web 浏览器解释。 要访问 Potree 工具,只需单击通常位于屏幕左上角的按钮,打开包含各种选项的菜单来探索和分析点云数据。
Potree 的部分(外观、工具、场景、滤镜)提供以下功能:
- 定义点云的视觉方面。
- 优化显示性能(标准、高质量)。
- 选择导航模式来探索数据。
- 执行测量(距离、轮廓、切片等)。
- 创建动画。
Potree 的菜单有不同的部分
在详细了解 Potree 菜单中的每个窗口之前,了解该窗口中的每个项目都是完全可自定义的非常重要。
Potree 菜单的顶行提供对基本链接的快速访问,包括 Potree 网站、GitHub 存储库和版本号(当前为 1.8.0)。 此外,它还提供在 EN-FR-DE-JP-ES-SE-ZH-IT 之间切换的语言选项。
单击某个部分可展开其内容,从而允许您访问所需的功能。 “外观”和“场景”部分控制点云的视觉方面。 虽然“外观”部分中的属性全局适用,但“场景”属性单独特定于每个场景(点云)。
在“场景”部分中,用户可以打开/关闭各个点云场景,从而实现特定数据集的无缝导航和分析。
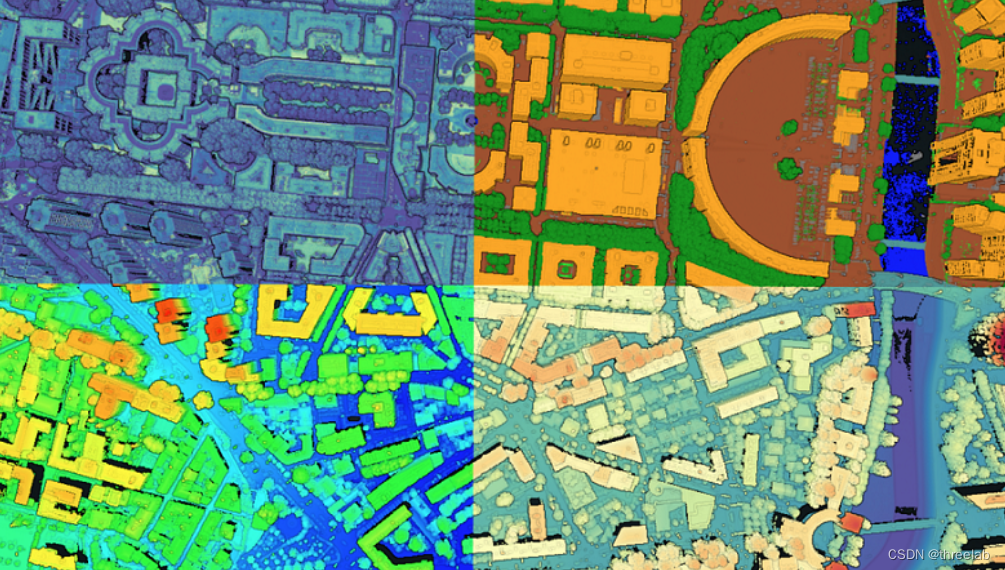
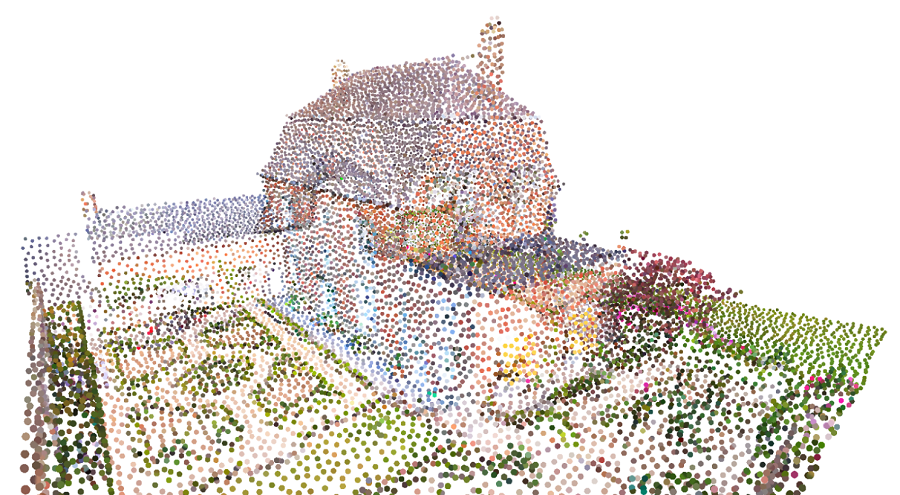
在下面的示例中,我们同时加载多个点云,但是,允许我们单独为每个云着色:
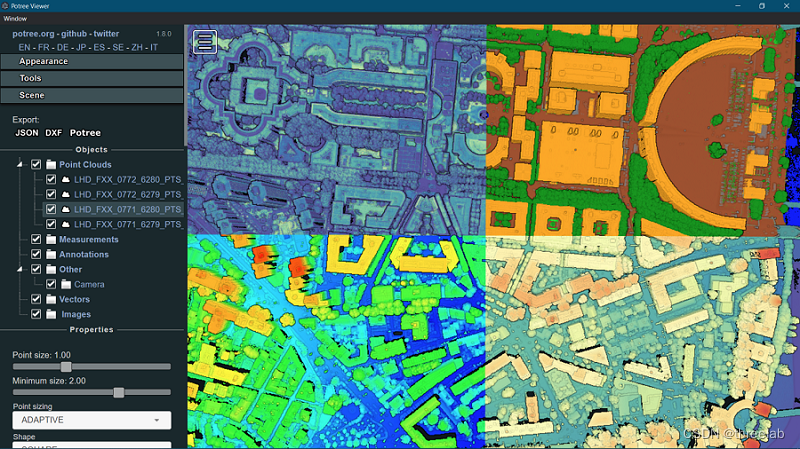
使用不同样式渲染的 4 个独立点云(强度、分类和高程)
2、外观
在 Potree 查看器的“外观”部分,你可以个性化点云(全部)的视觉表示。 本节包含一系列选项。

它包括调整选项:
- 点预算:此参数允许用户设置考虑显示的点数,影响屏幕上的点密度。 虽然它不是影响点密度的唯一因素,但调整点预算有助于优化细节级别以实现高效可视化。 最大值设置为 1000 万,但可以在代码中调整。
- 视野:它决定了从观看者的角度可见的场景范围。 最佳 FoV 设置为 60。
- Eye Dome 照明:通过启用 Eye Dome 照明,你可以受益于增强的着色计算方法,该方法可以锐化边缘,提高深度感。 可以通过调整“半径”和“强度”之间的权衡来管理由眼罩照明引起的变暗效果。 该工具在处理未着色的点云时非常有用,如下一个示例所示:

没有 EDL 的相同点云(左)和有 EDL 的点云(右),半径和强度参数影响边缘阴影@ULB 的程度
- 背景:设置背景样式(天空盒、渐变、黑色、白色或无)。 你甚至可以使用个人图像来个性化背景。
- Splat 质量:标准质量和高质量之间的设定点方面。 顾名思义,高质量选项在视觉上更加真实:
- 最小节点大小:此设置定义八叉树节点的大小。 Potree 采用基于八叉树数据结构的创新点存储技术。 这种结构将空间细分为不同大小的立方体,每个立方体都有特定的细节级别。 当你在点云中导航时,Potree 会根据相机和目标位置动态加载和显示立方体,甚至可以优化大量点云的性能(你可能已经注意到)。 通过调整此参数,你可以控制这些立方体的大小和显示的细节级别。 较小的节点大小可提供更高的细节,从而提供更复杂的数据视图。 另一方面,如果遇到性能问题,增加“最小节点大小”值可以通过显示更少的立方体来提高渲染速度,特别是对于密集的点云。 但是,请注意不要将其与“积分预算”混淆,即使它也会影响积分数量。
最小节点大小 = 1000(较低细节 = 大节点)

最小节点大小 = 20(更高细节 == 小节点)
- Box:选中时,显示八叉树的立方体结构。 此功能直观地说明了点云如何组织成不同大小的分层立方体。 通过启用“框”显示,你可以深入了解八叉树的划分和层次结构,从而增强对数据组织的理解。
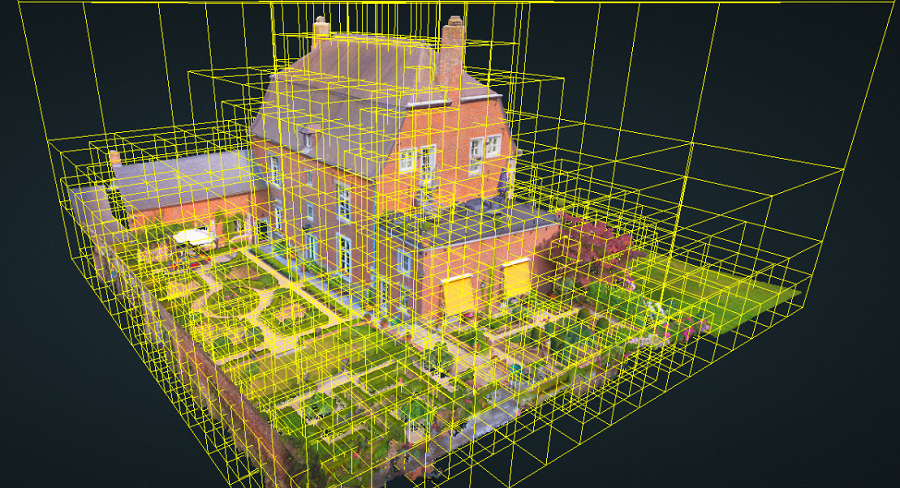
八叉树的立方体结构@Potree
- 锁定:冻结节点大小视图。 启用“锁定”选项后,无论缩放或导航,节点大小都保持不变。 此功能可确保点云的详细程度在整个探索过程中保持一致,从而提供稳定且受控的可视化体验。

用户视角
在此示例中,我放大了该窗口,然后检查了锁定,并且还以详细程度显示了点云,以便您可以了解 potree 的工作原理。 用户的视野得到了很好的显示(细节水平较高),但相机看不到的其余部分的细节水平较低。
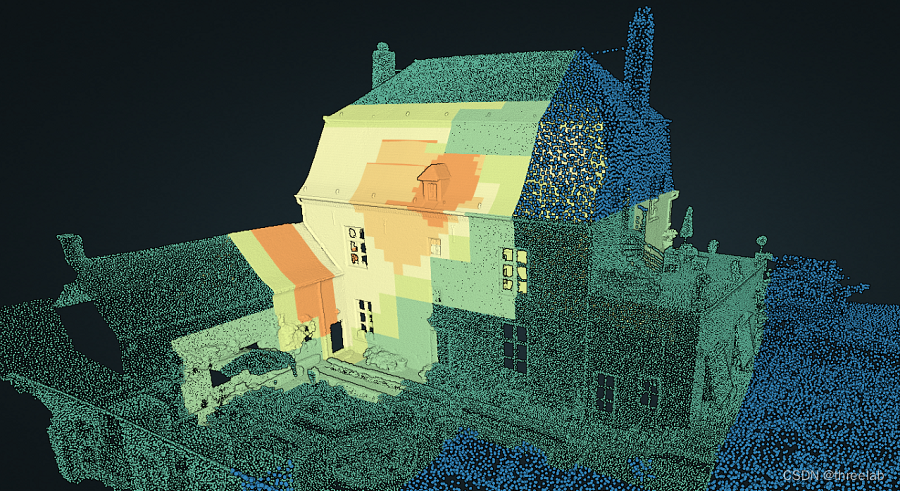
渲染后的点云是什么样的
3、工具
在“工具”部分下,Potree 提供了多种功能来支持数据探索和分析。 “测量”部分提供了直接在点云内精确测量距离、角度、面积和体积的基本工具。 此外,剖面工具允许提取和可视化高程剖面,有助于全面了解数据中的地形和结构。
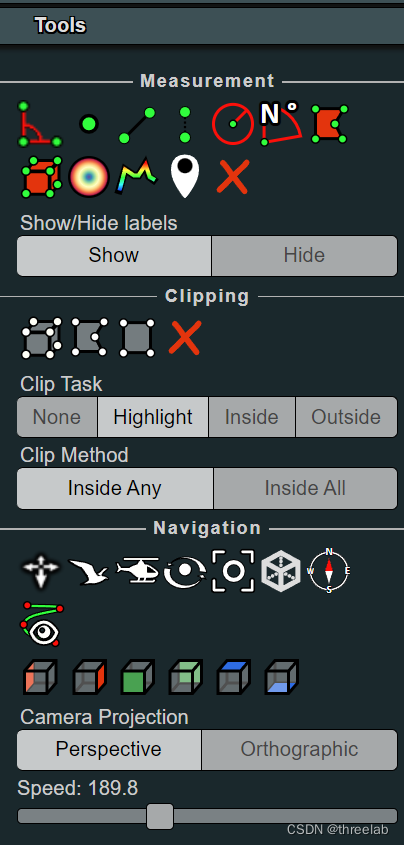
在“裁剪”部分,你可以使用裁剪工具剪切点云,有效地隔离和聚焦特定的感兴趣区域。 此功能增强了对点云内详细部分的检查,提高了数据解释和探索效率。
“导航”部分提供了多种导航模式和视图切换(左、右、前、后、上、下),因此你可以轻松地从多个角度导航和检查数据。 此外,此部分允许你在透视和正交相机投影之间切换。
在下图中,我们使用了从 Sketchfab(此处)以 LAS 格式下载的点云。 你还可以在查看器 potree(此处)中使用 OpenHeritage3D 提供的版本。
点、距离和角度测量
测量长度:
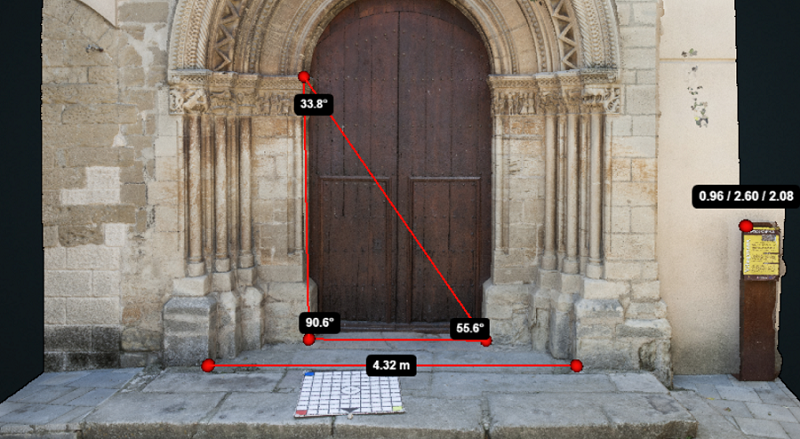
垂直高度测量
面积和圆测量:
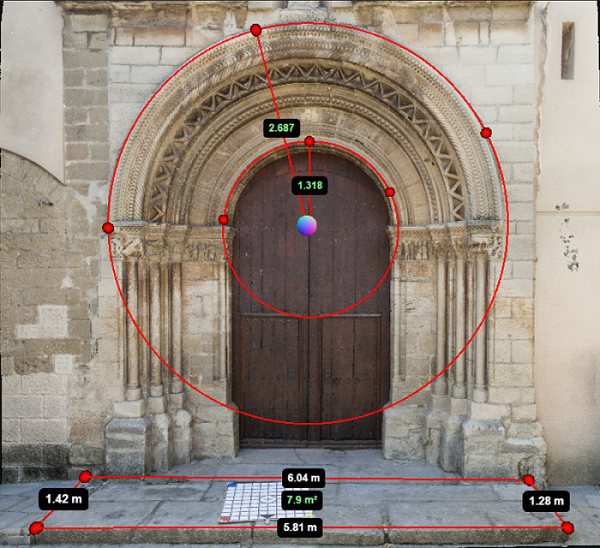
面积和圆测量
体积测量:

体积测量
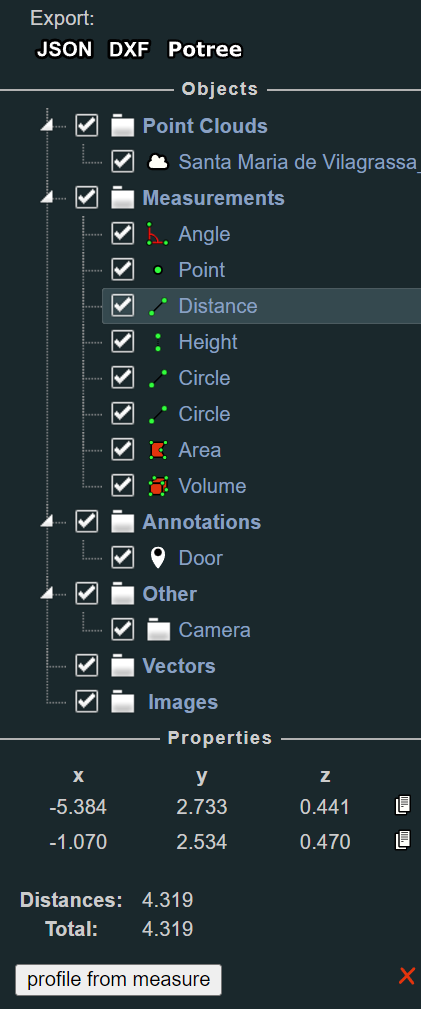
标注添加:

进行测量后,可以在 Potree 的“场景 >> 测量”部分找到它们。 从那里,可以根据需要灵活地管理测量。 可以使用底部的红色 X 图标删除特定测量值,或以 JSON、DXF 或 Potree 格式全局导出它们。
在下图中,“轮廓”工具非常方便,不仅提供即时高程轮廓可视化,还提供将点导出为 CSV (2D) 或 DXF (2D) 文件或 DXF 或 LAS 中的点云的选项 格式。 这有利于与 CAD/BIM 软件的无缝数据交换,增强跨不同平台的互操作性。
请注意,还可以指定在轮廓内捕获点所考虑的宽度,以便进行集中和精确的分析。 可以轻松启用或禁用先前测量的显示,以实现整洁的可视化(只需取消选中复选框即可)。
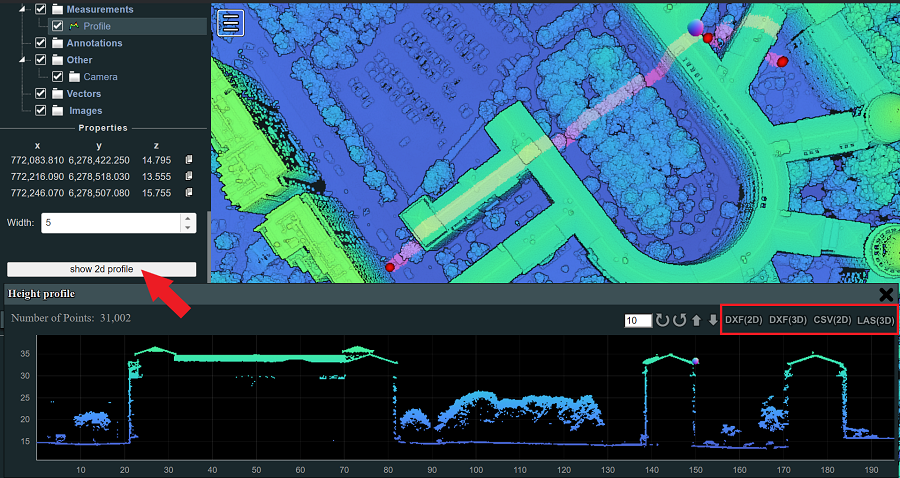
轮廓提取(法国蒙彼利埃激光雷达高清点云)
- 裁剪:允许你精确控制显示点云的哪些部分,或者仅突出显示,如下例所示。
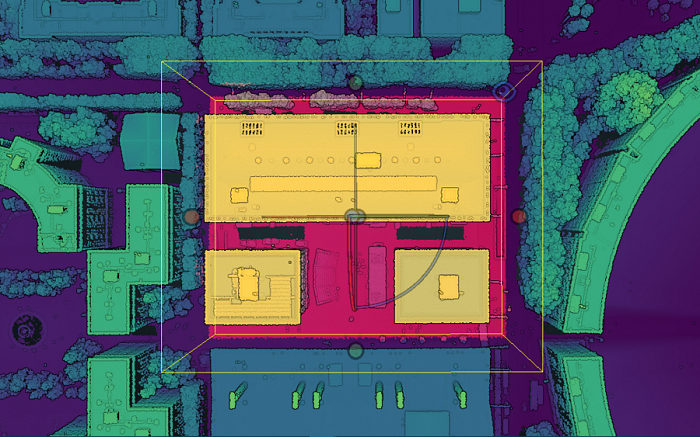
Potree 中的裁剪允许用户专注于点云数据中感兴趣的特定区域。 通过定义剪辑体积,可以通过显示体积内的点(剪辑内部)或排除其外部的点(剪辑外部)来关注特定的感兴趣区域。

剪裁结果,外部(左)和内部(右)(LiDAR HD 点云,法国蒙彼利埃)
- 导航:Potree提供多种导航模式,为您提供对3D点云可视化的灵活直观的控制。
Aucun 替代文字图像
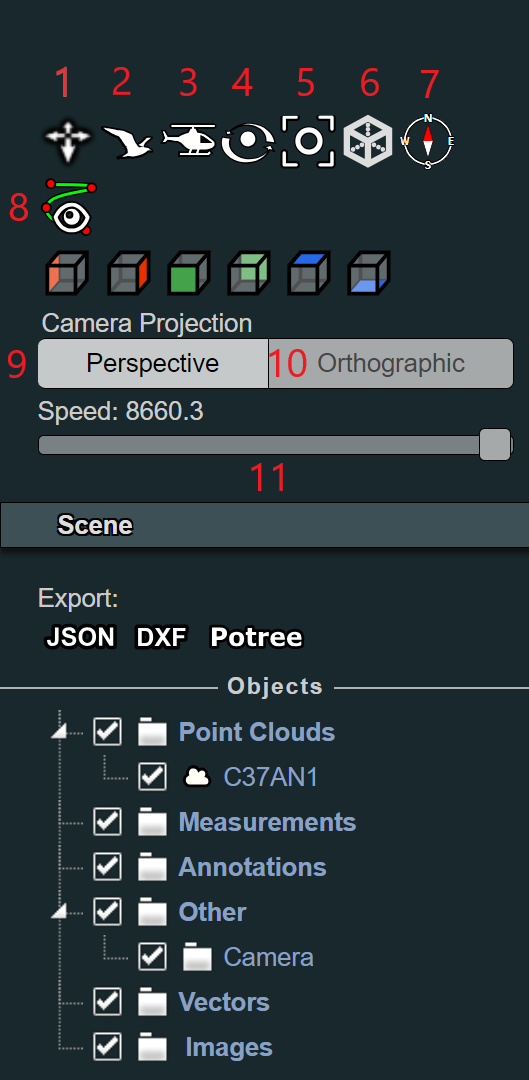
地球控制:将鼠标悬停在点云上并左键单击以移动,或右键单击以旋转模型。 初始单击点处会出现一个彩色圆圈,代表旋转中心。 缩放是使用鼠标滚轮实现的。
飞行控制:左键单击控制飞行方向,使用键盘方向键向前或向后移动。 右键单击与移动相结合可以平移视图。 在此模式下,鼠标滚轮用于加速或减速移动。
直升机控制:与飞行控制比较相似。
轨道:左键单击,围绕当前中心进行 3D 旋转(可以通过双击点云的一个点来调整中心,单击右键 = 平移
全范围:缩放扩展到点云范围; 6. Cube:显示视图立方体; 7. 指南针:用于定向; 8. 创建相机动画。
测量模型时,正交投影通常很有用。 透视模式 (10) 用于可视化和呈现点云和网格。
速度:您可以根据需要加速/减速。
4、场景
场景部分包含不同的对象。
- 点云:场景可以由一个或多个点云组成。
- 标注:这里进行标注管理。
- 其他:在这里可以找到摄像机和目标位置。
- 矢量:此功能允许在场景中包含和管理矢量数据。
- 图像:可以将图像(定向和地理参考或非定向)合并到场景中。
如果类别中有多个对象,则会出现一个三角形指示符,使你可以轻松展开和滚动列表。 当选择一个对象时,其属性变得可见,提供每种对象类型特有的特定详细信息。
4.1 点云
在 Potree 中,点云属性在定义其视觉方面起着至关重要的作用。 您可以控制多种显示设置,包括点大小、点大小选项(固定、衰减或自适应)、形状(方形、圆形、抛物面)和不透明度。 这些设置允许微调点云的外观以满足特定的可视化需求。
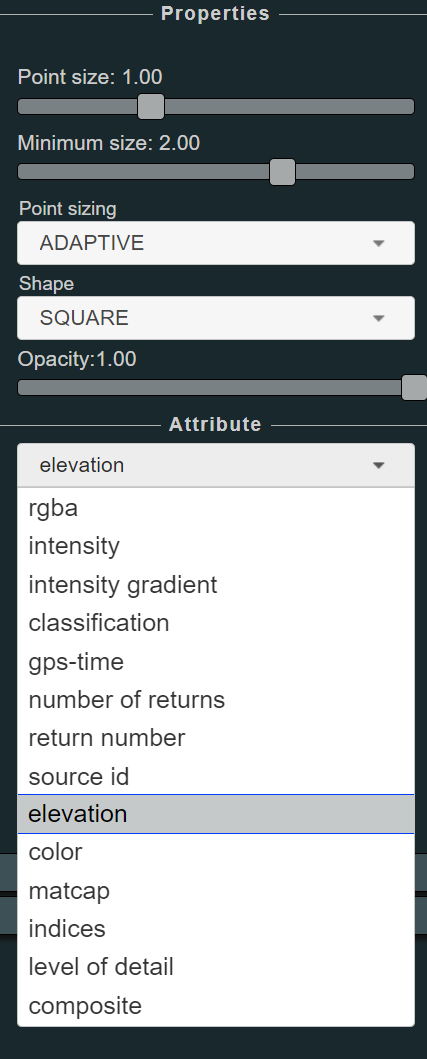
点云的“属性”小节允许你选择着色样式:
- RGB:真彩色,如果点云是彩色的。
- RGB 和高程:按高程在 RGB 和色带之间混合。
- 颜色:仅一种颜色 RGB(例如红色、黄色、白色...)
- 海拔:按海拔的颜色渐变。 您可以使用不同的坡道样式。
- 强度:按强度(灰度)划分的颜色渐变,仅在 LiDAR 点云中可用,无摄影测量。
- 强度梯度:强度色带
- 分类:是否对点云进行分类。
- Return number:信号返回次数(通常只有LIDAR数据)
- 详细程度:详细程度
- 复合:您可以混合以上所有内容。
- GPS时间、指数...等
Potree 的最新版本支持根据 ASPRS 规范存储在 LAS 文件中的所有属性。 如果您的点云包含附加属性,它甚至允许您添加附加属性。 我们举一个例子,如果您的点云包含树标识符,那么您将用不同的颜色显示树。 其他属性(例如细节级别)不会在转换时出现,而是根据相机的视野即时计算。
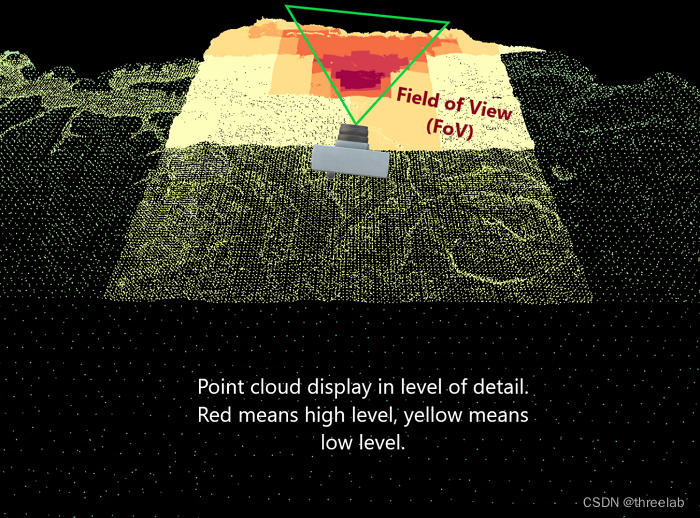
使用锁定以细节级别渲染点云以查看 FoV 的外部部分。
你可能已经注意到,我们只操纵点云。 但是,其他类型的数据(例如定向图像、矢量数据和网格)可以添加到 Potree 查看器中。 由于这需要自定义查看器,因此必须将这些数据添加到 HTML 页面。 这就是我们将在接下来的几篇文章中讨论的内容。
如果对恁有帮助,请点赞打赏支持,多谢!
技术合作交流qq:2945853209
网站分享:产品列表![]() https://threelab.cn/#/
https://threelab.cn/#/
)












可行性研究的报告)





