具身智能双臂主从手项目方案
一、公司介绍
- 成立于2018年,是一家专注于超轻量仿人机械臂研发、生产及销售的国家级高新技术企业。总部位于北京石景山区首特产业园,工厂坐落于江苏省常州科教城智能数字产业园,团队的核心成员毕业于北京航空航天大学、哈工程等国内著名院校。
- 作为超轻量仿人机械臂的引领者,经过多年技术攻关,突破减速器、电机、驱动器、控制器等核心零部件技术瓶颈,打造出了拥有完全自主知识产权的全球最轻量的仿人机械臂。
- 已形成RM65、RM75、RML63、ECO65、ECO62、Gen72六大系列共计12款产品,并与我们的合作伙伴共同打造以超轻量仿人机械臂为核心的生态产业链。产品已广泛应用于新零售、新餐饮、工业生产、商业服务、医疗健康、科研教育、检验检疫、智能巡检、航空航天、军事等各领域。
- 二、功能概述
- 功能简介
- 双机械臂机器人在工业、家居、办公、医疗等场景都有着广泛的应用前景。在工业场景,双臂可以协同工作,完成相比单臂机器人更精细的装配任务。在服务行业,双臂机器人可以在家庭、养老和医疗机构中更自然地提供清洁、照顾老人等。双臂机器人的开发和应用涉及许多技术和挑战,真实数据的获取是其中一个重要问题,包括:数据采集方法、采集成本、数据多样性、数据的有效性等。从示教中模仿学习,在机器人技术中表现出了令人印象深刻的表现。然而,大多数研究都集中在桌面操作上,缺乏日常家居和办公任务所需的移动性和灵活性。因此,合适的带移动底盘的双臂数据收集平台,是当前具身智能研究一个不可回避的问题。
- 一、人员可通过主动手臂的示教操作,控制从动手臂完成相应的动作,配套控制夹取手柄,从动手臂夹具可完成物体的夹取动作;
- 二、为了提高适用性,主动手臂结构可拆卸至其他地方进行远程操作;
- 三、从动手臂末端配有夹具及配套视觉,另加一套配套平台主视觉,待检测到目标物体,计算目标物体在机械臂基坐标系下的坐标,然后向机器人发布目标位置,调用机械臂运动接口与夹爪控制接口,抓取目标物体。
- 四、从动手臂抓取平台可拆卸,灵活匹配其他设备平台。
- 产品场景介绍
- 具身智能数据收集平台,这是一种用于数据收集的低成本全身远程操作系统。该设备具有移动底盘、两个执行机械臂、视觉模组,以及配套的真实数据采集方案。该设备具有自主导航、定位能力,建图后可自主到达地图中指定位置。两个机械臂都可自主操作,末端带有二指夹爪,可通过程序控制完成桌面物体拿取、放置、整理等任务。同时,整套方案有很方便的遥控数据采集方法,可通过遥控方式,完成室内场景的各类任务,居家环境:拉开窗帘打开窗户浇花、进行室内除尘打扫、冲泡咖啡、做饭、倒垃圾使用洗衣机、晾衣服等;办公场景:桌面擦拭、椅子摆放、递送材料、物品收纳等。
- 三、系统设计
- 1.系统构成:
- (1)主从手机器人技术实训平台是专门面向科研与教育培训领域的教学实训平台。集成了从机械、电子电气与人工智能等各学科知识内容,学生可以利用平台学习掌握机器人理论知识,并在现有工作台上验证,帮助学生从理论知识上升到实际操作。此外,研究人员可以依托平台结合已有科研课题,完成科研实验与算法理论验证。
- (2)机械臂系统:睿尔曼RM65系列超轻量机械臂,负载5kg自重7.2kg具有超高的负载自重比,无传统控制柜将控制器与机械臂完美融为一体,一体化机械臂仍自带丰富接口满足多种应用需求扩展,提供丰富的API函数库,便于二次开发。末端具备通用接口,灵活扩展,即插即用,一体化机械臂结构且自带丰富接口,满足多行业应用需求扩展。
- (3)视觉系统:选用 Intel Realsense D435深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,有效距离0.11m~10m,可满足视觉感知环境需求。使用LX-224HV舵机作为头部旋转关节,可进行头部旋转和俯仰控制,扩大机器人的视野感知范围与操作空间。
- (4)主控系统:使用Nvidia Jetson XAVIER NX 模组,该模组预装Ubuntu18.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384 核Volta 架构的GPU及48个 TensorCore,能带来 21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm。主控模块是整个系统的控制中枢,主要负责给移动底盘、机械臂及其末端执行器发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制复合升降机器人以及二次开发。
- (5)电动夹爪:选取EG2-4C电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。
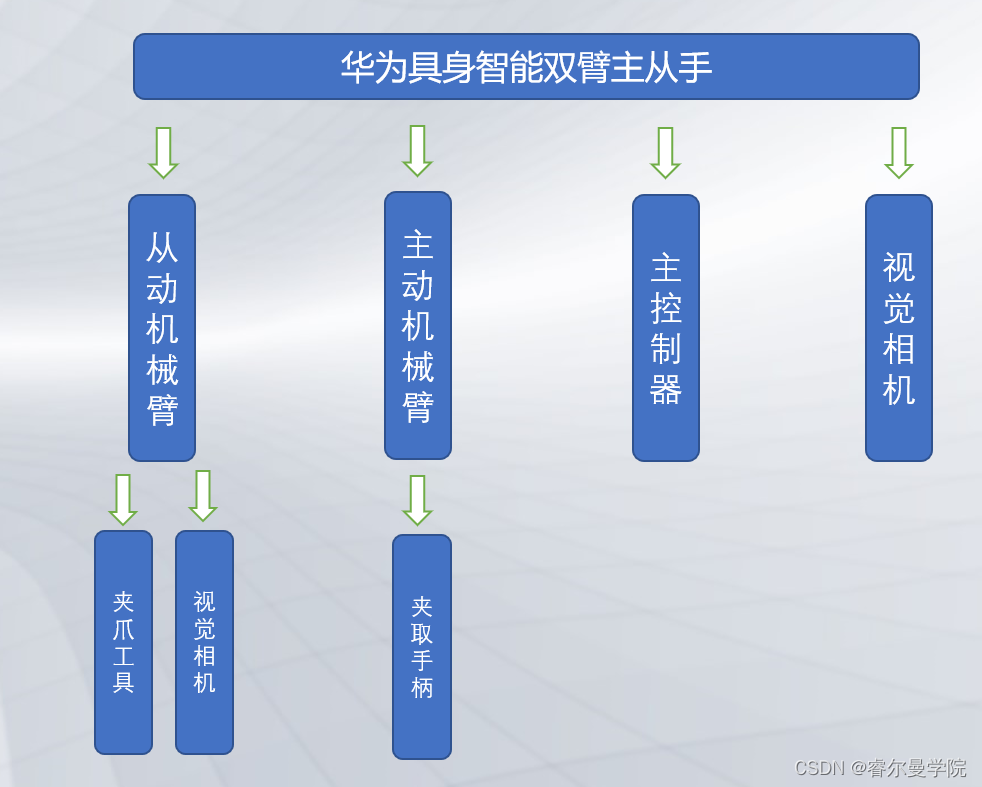
- 2.系统机构图:
- 四、设备功能
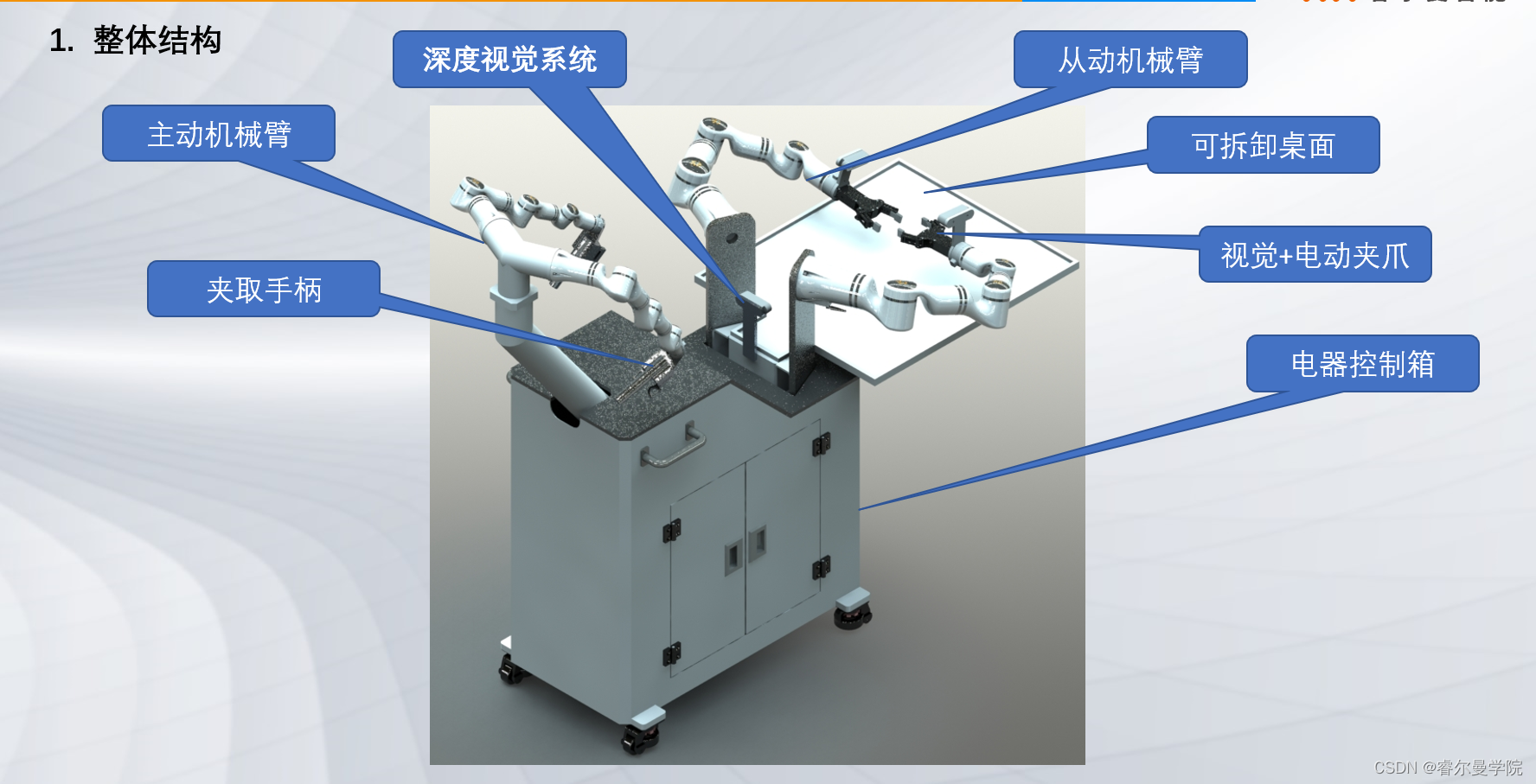
- 整体结构
1. 机械臂
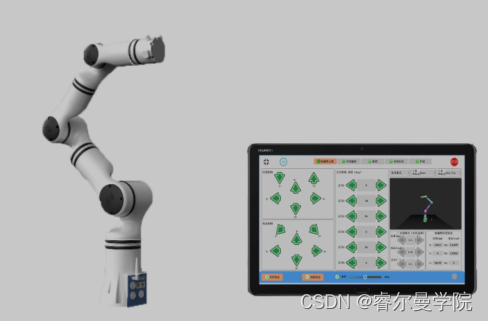
睿尔曼RM65-B仿人机械臂自重7.2Kg,额定负载5Kg,臂展610mm,重复定位精度±0.05mm,具有一体化结构控制器,搭载在机器人上能够完美契合“人形”的概念。其示教方式极其方便,可通过网线和wifi方式连接机械臂,通过访问机械臂本体IP,即可完成示教界面的访问。
主要技术参数:
(1) 控制轴数:6轴
(2) 有效负载:5kg
(3) 机械臂净重:7.2kg
(4) 控制器:与机械臂一体化
(5) 重复定位精确度:±0.05mm
(6) 有效工作半径:610mm
(7) 供电电压:DC24V
(8) 工作温度:0℃~45℃
(9) 工作湿度:10%~80%,且无凝露
(10) 通信接口: Ethernet/WIFI/RS485
(11) I/O接口:数字输出:4路、数字输入:3路、模拟量输出:4路(0-10V电压)、模拟量输入:4路(0-10V电压)
(12) 示教方法:平板/电脑
(13) 运动范围:关节1转动范围:±178°,关节2转动范围:±130°,关节3转动范围:±135°,关节4转动范围:±178°,关节5转动范围:±128°,关节6转动范围:±360°
(14) 关节最大速度:J1-J2 180°/s、J3-J6 225°/s
(15) 功耗:最大功耗≤200W 综合功耗≤100W
(16) 防护等级:IP54(机械臂本体)
2. 主控制器

主控主要负责以下功能:
(1) 与用户通过WIFI通信,接收用户指令,上传系统状态;
(2) 通过USB3.0接收视觉传感器,对目标物体进行识别和定位;
(3) 通过网口与机械臂通信,发送机械臂控制指令,获取机械臂状态信息;
(4) 通过网口与移动底盘通信,发送底盘控制指令,获取底盘状态信息。
3. 深度视觉系统

深度视觉系统选用 Intel Realsense D435深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,并且提供开发SDK和ROS功能包,方便使用者实时获取相机图像数据,并且兼容常见操作系统与机器人运行系统,便于使用者者快速进行二次开发。
主要技术参数:
(1) 环境:室内和室外
(2) 深度技术:主动IR立体
(3) 组件:英特尔®实感™视觉处理器D4/英特尔®实感™模块D435
(4) 深度视野(横向×纵向×对角线):91.2°×65.5°×100.6°
(5) 深度流输出分辨率:达1280×720
(6) 深度流输出帧速率:达90fps
(7) 最小深度距离(Min-Z):0.2米
(8) 红外信号发射器功率:可配置至达425毫瓦(mW)
(9) 图像传感器类型:全局快门
(10) 最大范围:10米及更远,随校准、场景、光照条件而变
(11) RGB传感器分辨率和帧速率:30fps时为1920×1080
(12) RGB传感器视野(横向×纵向×对角线):69.4°×42.5°×77°
4. 末端工具

选取EG2-4C电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。该夹爪内部集成了 1 个直线伺服驱动器,用户接口采用 RS485 通信接口,内置灵敏的压力传感器,通过设置不同的压力阈值方便用户进行不同硬度物体的夹取。这款夹爪可设置爪子张合时的速度、力度、位置。其中速度设置范围为 0~255, 力度设置范围为 0~255,位置设置范围为 0~255。电动夹爪最大开口为 70 毫米, 最高可实现 1.5Kg 的夹持力。
主要技术参数:
(1) 通信接口:RS485
(2) 总行程(两侧):70mm
(3) 重量:231g
(4) 夹持力:0~20N
(5) 工作电压: DC24V±10%
(6) 峰值电流:0.7A
(7) 重复定位精度:±0.5mm
(8) 最大速度:70mm/s
(9) 防护等级:IP40
五、主要技术参数
(1) 充电电源:单相三线~220V±10% 50Hz
(2) 工作电压:DC24V
(3) 工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
(4) 平台尺寸:平台高度1000mm,最大臂展1040mm
(5) 安全保护:具有激光扫描避障、视觉避障、紧急停止等功能
(6) 对外接口:网口、USB口、HDMI


本地化库 - 平面类别 - (std::ctype) 定义字符分类表(三))










设置)





