目录
python 空间距离计算
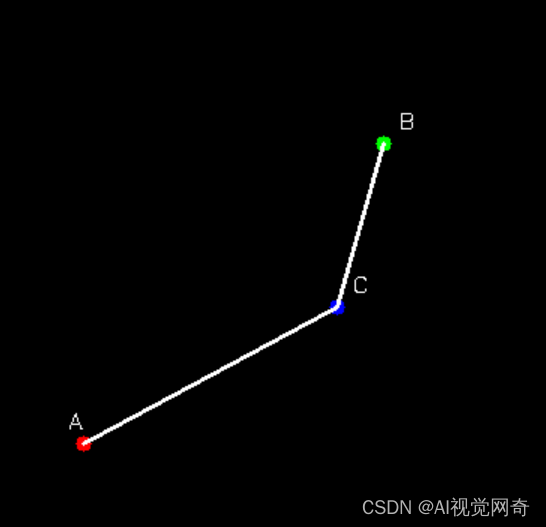
已知两点,画三角形
批量矩阵计算
python 空间距离计算
要在空间中找到一个点,使其位于点 b 和 c 之间的连线上,并且与点 b 的距离等于点 a 到点 b 的距离的2倍。
import numpy as npif __name__ == '__main__':a = np.array([1, 2, 1])b = np.array([3, 4,2])c = np.array([7, 8, 15])bc = c - bprint('dis a',np.linalg.norm(b - a) )# 计算点 d 的坐标,使得 db = abd = b + 2*(np.linalg.norm(b - a) / np.linalg.norm(bc)) * bcprint("点 d 的坐标为:", d)print('dis a', np.linalg.norm(d - b))已知两点,画三角形
import numpy as np
import cv2# 定义点 a 和 b
a = np.array([100, 400])
b = np.array([300, 200])# 计算向量 ab 和点 d 的坐标
ab = b - a
d = a + 0.65 * ab# 计算向量 ab 的单位法向量
n = np.array([-ab[1], ab[0]])
n = n / np.linalg.norm(n)up=-1
# 计算点 c 的坐标
c = d -up* int(0.2 * np.linalg.norm(ab)) * n# 创建一个黑色背景的图像
height, width = 500, 500
img = np.zeros((height, width, 3), dtype=np.uint8)# 在图像上绘制点和线段
cv2.circle(img, tuple(a), 5, (0, 0, 255), -1)
cv2.circle(img, tuple(b), 5, (0, 255, 0), -1)
cv2.circle(img, tuple(c.astype(int)), 5, (255, 0, 0), -1)
cv2.line(img, tuple(a), tuple(c.astype(int)), (255, 255, 255), 2)
cv2.line(img, tuple(b.astype(int)), tuple(c.astype(int)), (255, 255, 255), 2)# 添加文字标签
cv2.putText(img, 'A', tuple(a - np.array([10, 10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
cv2.putText(img, 'B', tuple(b + np.array([10, -10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
cv2.putText(img, 'C', tuple(c.astype(int) + np.array([10, -10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)# 显示图像
cv2.imshow('Points and Lines with Labels', img)
cv2.waitKey(0)
cv2.destroyAllWindows()批量矩阵计算
import numpy as np
import cv2if __name__ == '__main__':up=1# 定义多组点 a 和 b 的坐标A = np.array([[100, 100], [150, 250], [200, 300]])B = np.array([[300, 400], [400, 450], [400, 600]])# 计算向量 AB 和点 D 的坐标AB = B - AD = A + 0.65 * AB# 计算向量 AB 的单位法向量N = np.array([-AB[:, 1], AB[:, 0]]).TN_norm = np.linalg.norm(N, axis=1, keepdims=True)N_unit = N / N_norm# 计算点 C 的坐标C = D + 0.2 *up* np.linalg.norm(AB, axis=1, keepdims=True) * N_unit# 创建一个黑色背景的图像height, width = 600, 600img = np.zeros((height, width, 3), dtype=np.uint8)# 在图像上绘制点和线段for i in range(A.shape[0]):a, b, c = A[i], B[i], C[i]cv2.circle(img, tuple(a), 5, (0, 0, 255), -1)cv2.circle(img, tuple(b), 5, (0, 255, 0), -1)cv2.circle(img, tuple(c.astype(int)), 5, (255, 0, 0), -1)cv2.line(img, tuple(a), tuple(c.astype(int)), (255, 255, 255), 2)cv2.line(img, tuple(b), tuple(c.astype(int)), (255, 255, 255), 2)cv2.putText(img, f'A{i + 1}', tuple(a - np.array([10, 10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)cv2.putText(img, f'B{i + 1}', tuple(b + np.array([10, -10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)cv2.putText(img, f'C{i + 1}', tuple(c.astype(int) + np.array([10, -10])), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)# 显示图像cv2.imshow('Batch Points and Lines with Labels', img)cv2.waitKey(0)cv2.destroyAllWindows()
)
)

)












集群健康检查常用的五种指标)

