个人专栏—塑性力学
1.1 塑性力学基本概念 塑性力学基本概念
1.2 弹塑性材料的三杆桁架分析 弹塑性材料的三杆桁架分析
1.3 加载路径对桁架的影响 加载路径对桁架的影响
2.1 塑性力学——应力分析基本概念 应力分析基本概念
2.2 塑性力学——主应力、主方向、不变量 主应力、主方向、不变量
目录
斜截面上的应力 \color{blue}斜截面上的应力 斜截面上的应力
-
主平面(Principal Plane) :剪应力为0的截面。
-
主单元体(Principal Body) :各侧面上剪应力均为0的单元体。
-
主应力(Principal Stress) :主平面上的正应力。
取四面体单元体微元进行应力分析,斜面外法线$\mathbf{N} $的方向余弦为 l x , l y , l z l_x,l_y,l_z lx,ly,lz,应力 P \mathbf{P} P沿笛卡尔坐标系分量为 $p_x,p_y,p_z $.
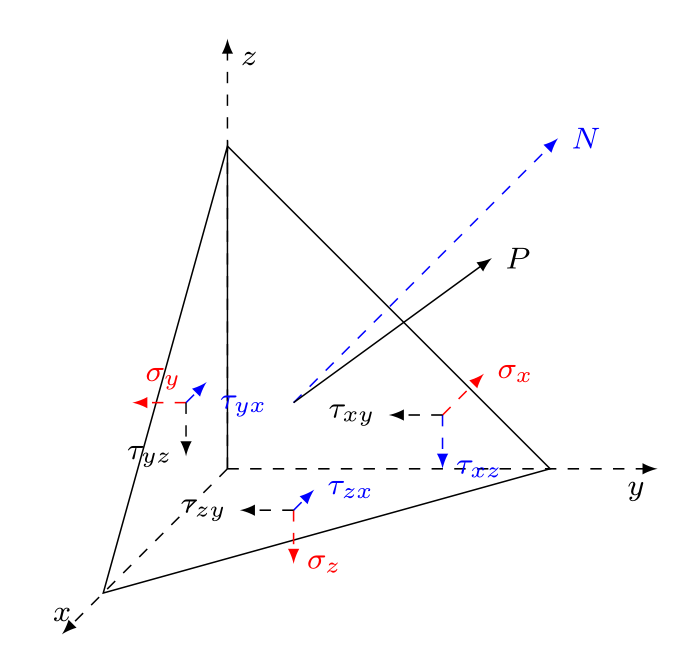
由弹性力学平衡方程可得斜面应力分量:
{ p x = σ x l x + τ x y l y + τ x z l z p y = τ y x l x + σ y l y + τ y z l z p z = τ z x l x + τ z y l y + σ z l z → p i = σ i j l j \begin{equation*} \begin{cases} p_x=\sigma_xl_x+\tau_{xy}l_y+\tau_{xz}l_z\\ p_y=\tau_{yx}l_x+\sigma_yl_y+\tau_{yz}l_z\\ p_z=\tau_{zx}l_x+\tau_{zy}l_y+\sigma_zl_z \end{cases}\to p_i=\sigma_{ij}l_j \end{equation*} ⎩ ⎨ ⎧px=σxlx+τxyly+τxzlzpy=τyxlx+σyly+τyzlzpz=τzxlx+τzyly+σzlz→pi=σijlj
-
斜面总应力:
P = p x 2 + p y 2 + p z 2 \mathbf{P}=\sqrt{p_x^2+p_y^2+p_z^2} P=px2+py2+pz2 -
斜面上的正应力:$\mathbf{P} $沿外法线方向的分量
σ N = p x l x + p y l y + p z l z = p i l i \sigma_N=p_xl_x+p_yl_y+p_zl_z=p_il_i σN=pxlx+pyly+pzlz=pili -
斜面上的总剪应力:
τ N = P 2 − σ N 2 \tau_N=\sqrt{\mathbf{P}^2-\sigma_N^2} τN=P2−σN2
当外法线 $\mathbf{N} $方向沿着主方向,则该面上剪应力为0,只有正应力,且正应力为 $\mathbf{P} $,设 $\mathbf{P} $大小为 $\lambda $,在各坐标轴投影为 $p_i=\lambda l_i $
{ p i = σ i j l j p i = λ l i → ( σ i j − λ δ i j ) l j = 0 → σ i j − λ δ i j ∣ = 0 p i = σ i j l j → { p 1 = σ 11 l 1 + τ 12 l 2 + τ 13 l 3 p 2 = τ 21 l 1 + σ 22 l 2 + τ 23 l 3 p 3 = τ 31 l 1 + τ 32 l 2 + σ 33 l 3 p i = λ l i → { p 1 = l 1 σ N p 2 = l 2 σ N p 3 = l 3 σ N { l 1 ( σ 11 − λ ) + τ 12 l 2 + τ 13 l 3 = 0 τ 21 l 1 + l 2 ( σ 22 − λ ) + τ 23 l 3 = 0 τ 31 l 1 + τ 32 l 2 + l 3 ( σ 33 − λ ) = 0 → ( σ i j − λ δ i j ) l j = 0 ∣ σ 11 − λ σ 12 σ 13 σ 21 σ 22 − λ σ 23 σ 31 σ 32 σ 33 − λ ∣ = 0 → λ 3 − J 1 λ 2 + J 2 λ − J 3 = 0 \begin{align*} &\begin{cases} p_i=\sigma_{ij}l_j \\ p_i=\lambda l_i \end{cases} \to (\sigma_{ij}-\lambda\delta_{ij})l_j=0 \rightarrow \sigma_{ij}-\lambda\delta_{ij}|=0\\ & p_i=\sigma_{ij}l_j \to \begin{cases} p_1=\sigma_{11}l_1+\tau_{12}l_2+\tau_{13}l_3\\ p_2=\tau_{21}l_1+\sigma_{22}l_2+\tau_{23}l_3\\ p_3=\tau_{31}l_1+\tau_{32}l_2+\sigma_{33}l_3 \end{cases}\\ & p_i=\lambda l_i \to \begin{cases} p_1=l_1\sigma_N\\ p_2=l_2\sigma_N\\ p_3=l_3\sigma_N \end{cases}\\ & \begin{cases} l_1(\sigma_{11}-\lambda)+\tau_{12}l_2+\tau_{13}l_3=0\\ \tau_{21}l_1+l_2(\sigma_{22}-\lambda)+\tau_{23}l_3=0\\ \tau_{31}l_1+\tau_{32}l_2+l_3(\sigma_{33}-\lambda)=0 \end{cases} \to (\sigma_{ij}-\lambda\delta_{ij})l_j=0 \\ & \begin{vmatrix} \sigma_{11}-\lambda & \sigma_{12} & \sigma_{13}\\ \sigma_{21} & \sigma_{22}-\lambda & \sigma_{23}\\ \sigma_{31} & \sigma_{32} & \sigma_{33}-\lambda \end{vmatrix}=0 \\ \to & \lambda^3-J_1\lambda^2+J_2\lambda-J_3=0 \end{align*} →{pi=σijljpi=λli→(σij−λδij)lj=0→σij−λδij∣=0pi=σijlj→⎩ ⎨ ⎧p1=σ11l1+τ12l2+τ13l3p2=τ21l1+σ22l2+τ23l3p3=τ31l1+τ32l2+σ33l3pi=λli→⎩ ⎨ ⎧p1=l1σNp2=l2σNp3=l3σN⎩ ⎨ ⎧l1(σ11−λ)+τ12l2+τ13l3=0τ21l1+l2(σ22−λ)+τ23l3=0τ31l1+τ32l2+l3(σ33−λ)=0→(σij−λδij)lj=0 σ11−λσ21σ31σ12σ22−λσ32σ13σ23σ33−λ =0λ3−J1λ2+J2λ−J3=0
求解三次方程: λ 3 − J 1 λ 2 + J 2 λ − J 3 = 0 \lambda^3-J_1\lambda^2+J_2\lambda-J_3=0 λ3−J1λ2+J2λ−J3=0可得 J 1 , J 2 , J 3 J_1,J_2,J_3 J1,J2,J3
应力张量的三个不变量 \color{blue}应力张量的三个不变量 应力张量的三个不变量
-
应力张量第一不变量
J 1 = σ 11 + σ 22 + σ 33 = σ i i J_1=\sigma_{11}+\sigma_{22}+\sigma_{33}=\sigma_{ii} J1=σ11+σ22+σ33=σii -
应力张量第二不变量
J 2 = σ 11 σ 22 + σ 22 σ 33 + σ 33 σ 11 − ( σ 12 2 + σ 23 2 + σ 31 2 ) = 1 2 ( σ i i σ k k − σ i j σ j i ) J_2=\sigma_{11}\sigma_{22}+\sigma_{22}\sigma_{33}+\sigma_{33}\sigma_{11}-(\sigma_{12}^2+\sigma_{23}^2+\sigma_{31}^2)=\frac{1}{2}(\sigma_{ii}\sigma_{kk}-\sigma_{ij}\sigma_{ji}) J2=σ11σ22+σ22σ33+σ33σ11−(σ122+σ232+σ312)=21(σiiσkk−σijσji) -
应力张量第三不变量
J 3 = σ 11 σ 22 σ 33 + 2 σ 12 σ 23 σ 31 − σ 11 σ 23 2 − σ 22 σ 31 2 − σ 33 σ 12 2 = ∣ σ i j ∣ = d e t ( σ i j ) J_3=\sigma_{11}\sigma_{22}\sigma_{33}+2\sigma_{12}\sigma_{23}\sigma_{31}-\sigma_{11}\sigma_{23}^2-\sigma_{22}\sigma_{31}^2-\sigma_{33}\sigma_{12}^2=|\sigma_{ij}|=det(\sigma_{ij}) J3=σ11σ22σ33+2σ12σ23σ31−σ11σ232−σ22σ312−σ33σ122=∣σij∣=det(σij) -
主应力表示应力不变量
{ J 1 = σ 1 + σ 2 + σ 3 J 2 = σ 1 σ 2 + σ 2 σ 3 + σ 3 σ 1 J 3 = σ 1 σ 2 σ 3 \begin{cases} J_1=\sigma_1+\sigma_2+\sigma_3\\ J_2=\sigma_1\sigma_2+\sigma_2\sigma_3+\sigma_3\sigma_1 \\ J_3=\sigma_1\sigma_2\sigma_3 \end{cases} ⎩ ⎨ ⎧J1=σ1+σ2+σ3J2=σ1σ2+σ2σ3+σ3σ1J3=σ1σ2σ3
$J_1,J_2,J_3 $取值与坐标轴的取向无关,称为应力张量的三个不变量。
应力偏张量的三个不变量 \color{blue}应力偏张量的三个不变量 应力偏张量的三个不变量
S i j = [ σ x − σ m τ x y τ x z τ y x σ y − σ m τ y z τ z x τ z y σ z − σ m ] = [ S 11 S 12 S 13 S 21 S 22 S 23 S 31 S 32 S 33 ] ⟹ σ i j − σ m δ i j → ( S i j − S N δ i j ) l j = 0 \begin{gather*} S_{ij}=\begin{bmatrix} \sigma_{x}-\sigma_m & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y-\sigma_m & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z-\sigma_m \end{bmatrix}=\begin{bmatrix} S_{11} & S_{12} & S_{13}\\ S_{21} & S_{22} & S_{23}\\ S_{31} & S_{32} & S_{33} \end{bmatrix}\\ \Longrightarrow \sigma_{ij}-\sigma_m\delta_{ij} \to (S_{ij}-S_N\delta_{ij})l_j=0\\ \end{gather*} Sij= σx−σmτyxτzxτxyσy−σmτzyτxzτyzσz−σm = S11S21S31S12S22S32S13S23S33 ⟹σij−σmδij→(Sij−SNδij)lj=0
同理求解三次方程: ( S i j − S N δ i j ) l j = 0 (S_{ij}-S_N\delta_{ij})l_j=0 (Sij−SNδij)lj=0
-
应力偏张量第一不变量
J 1 ′ = S 11 + S 22 + S 33 = σ 1 + σ 2 + σ 3 − 3 σ m = 0 J_1^{'}=S_{11}+S_{22}+S_{33}=\sigma_1+\sigma_2+\sigma_3-3\sigma_m=0 J1′=S11+S22+S33=σ1+σ2+σ3−3σm=0 -
应力偏张量第二不变量
J 2 ′ = − 1 2 S i j S j i = − 1 2 ( 2 S 12 2 + 2 S 23 2 + 2 S 31 2 + S 11 2 + S 22 2 + S 33 2 ) ∵ 0 = ( S 11 + S 22 + S 33 ) 2 = S 11 2 + S 22 2 + S 33 2 + 2 S 11 S 22 + 2 S 22 S 33 + 2 S 33 S 11 → S 11 2 + S 22 2 + S 33 2 = − ( 2 S 11 S 22 + 2 S 22 S 33 + 2 S 33 S 11 ) \begin{gather*} J_2^{'}=-\frac{1}{2}S_{ij}S_{ji}=-\frac{1}{2}(2S_{12}^2+2S_{23}^2+2S_{31}^2+S_{11}^2+S_{22}^2+S_{33}^2)\\ \because 0=(S_{11}+S_{22}+S_{33})^2=S_{11}^2+S_{22}^2+S_{33}^2+2S_{11}S_{22}+2S_{22}S_{33}+2S_{33}S_{11}\\ \to S_{11}^2+S_{22}^2+S_{33}^2=-(2S_{11}S_{22}+2S_{22}S_{33}+2S_{33}S_{11}) \end{gather*} J2′=−21SijSji=−21(2S122+2S232+2S312+S112+S222+S332)∵0=(S11+S22+S33)2=S112+S222+S332+2S11S22+2S22S33+2S33S11→S112+S222+S332=−(2S11S22+2S22S33+2S33S11)
J 2 ′ = − 1 2 ( S 11 2 + S 22 2 + S 33 2 ) − S 12 2 − S 23 2 − S 31 2 = − 1 6 ( 2 ( S 11 2 + S 22 2 + S 33 2 ) − 2 S 11 S 22 + 2 S 22 S 33 + 2 S 33 S 11 ) − S 12 2 − S 23 2 − S 31 2 = − 1 6 [ ( S 11 − S 22 ) 2 + ( S 22 − S 33 ) 2 + ( S 33 − S 11 ) 2 ] − S 12 2 − S 23 2 − S 31 2 = − 1 6 [ ( σ x − σ y ) 2 + ( σ y − σ z ) 2 + ( σ z − σ x ) 2 + 6 ( τ x y 2 + τ y z 2 + τ z x 2 ) ] = − 1 6 [ ( σ 1 − σ 2 ) 2 + ( σ 2 − σ 3 ) 2 + ( σ 3 − σ 1 ) 2 ] ⏟ 主轴方向 \begin{align*} J_2^{'}&=-\frac{1}{2}(S_{11}^2+S_{22}^2+S_{33}^2)-S_{12}^2-S_{23}^2-S_{31}^2\\ &=-\frac{1}{6}(2(S_{11}^2+S_{22}^2+S_{33}^2)-2S_{11}S_{22}+2S_{22}S_{33}+2S_{33}S_{11})-S_{12}^2-S_{23}^2-S_{31}^2\\ &=-\frac{1}{6}[(S_{11}-S_{22})^2+(S_{22}-S_{33})^2+(S_{33}-S_{11})^2]-S_{12}^2-S_{23}^2-S_{31}^2\\ &=-\frac{1}{6}[(\sigma_x-\sigma_y)^2+(\sigma_y-\sigma_z)^2+(\sigma_z-\sigma_x)^2+6(\tau_{xy}^2+\tau_{yz}^2+\tau_{zx}^2)]\\ &=\underbrace{-\frac{1}{6}[(\sigma_1-\sigma_2)^2+(\sigma_2-\sigma_3)^2+(\sigma_3-\sigma_1)^2]}_{\text{主轴方向}} \end{align*} J2′=−21(S112+S222+S332)−S122−S232−S312=−61(2(S112+S222+S332)−2S11S22+2S22S33+2S33S11)−S122−S232−S312=−61[(S11−S22)2+(S22−S33)2+(S33−S11)2]−S122−S232−S312=−61[(σx−σy)2+(σy−σz)2+(σz−σx)2+6(τxy2+τyz2+τzx2)]=主轴方向 −61[(σ1−σ2)2+(σ2−σ3)2+(σ3−σ1)2]
- 应力偏张量第三不变量
J 3 ′ = 1 3 S i j S j k S k l = S 11 S 22 S 33 + 2 S 12 S 23 S 31 − S 11 S 23 2 − S 22 S 31 2 − S 33 S 12 2 = S 11 S 22 S 33 ⏟ 主轴方向 \begin{align*} J_3^{'}&=\frac{1}{3}S_{ij}S_{jk}S_{kl}\\ &=S_{11}S_{22}S_{33}+2S_{12}S_{23}S_{31}-S_{11}S_{23}^2-S_{22}S_{31}^2-S_{33}S_{12}^2\\ &=\underbrace{S_{11}S_{22}S_{33}}_{\text{主轴方向}} \end{align*} J3′=31SijSjkSkl=S11S22S33+2S12S23S31−S11S232−S22S312−S33S122=主轴方向 S11S22S33
承接DIC数据图像处理模拟散斑制作(斑点直径≥0.1mm)及DIC散斑图像代处理:

如果你喜欢以上内容,或者对塑性力学感兴趣,欢迎一键三连,博主将持续更新,如果有任何问题,可以咨询博主,非常乐意为大家解答。




)














)