ubuntu20.04
QGC使用v4.3.0的版本
飛控pixhawk Mini4
飛控上只使用一條micro USB連接電腦,沒有其他線
安裝命令
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libfuse2 -y
sudo apt install libxcb-xinerama0 libxkbcommon-x11-0 libxcb-cursor0 -y運行,修改下USER,和 IMAGE_DIR的變量,IMAGE_DIR是存放QGroundControl.AppImage的位置
export USER=hao
export IMAGE_DIR=/home/hao/Documents/wks_third_party/resource/QGC/v4.3.0sudo usermod -a -G dialout $USER
cd $IMAGE_DIR
chmod +x ./QGroundControl.AppImage
./QGroundControl.AppImage
左上角Ready To Fly的位置按下去,中間會顯示一個小框框,裏面包括三個選項卡
Vehicle Setup
Analyze Tools
Aplication Settings
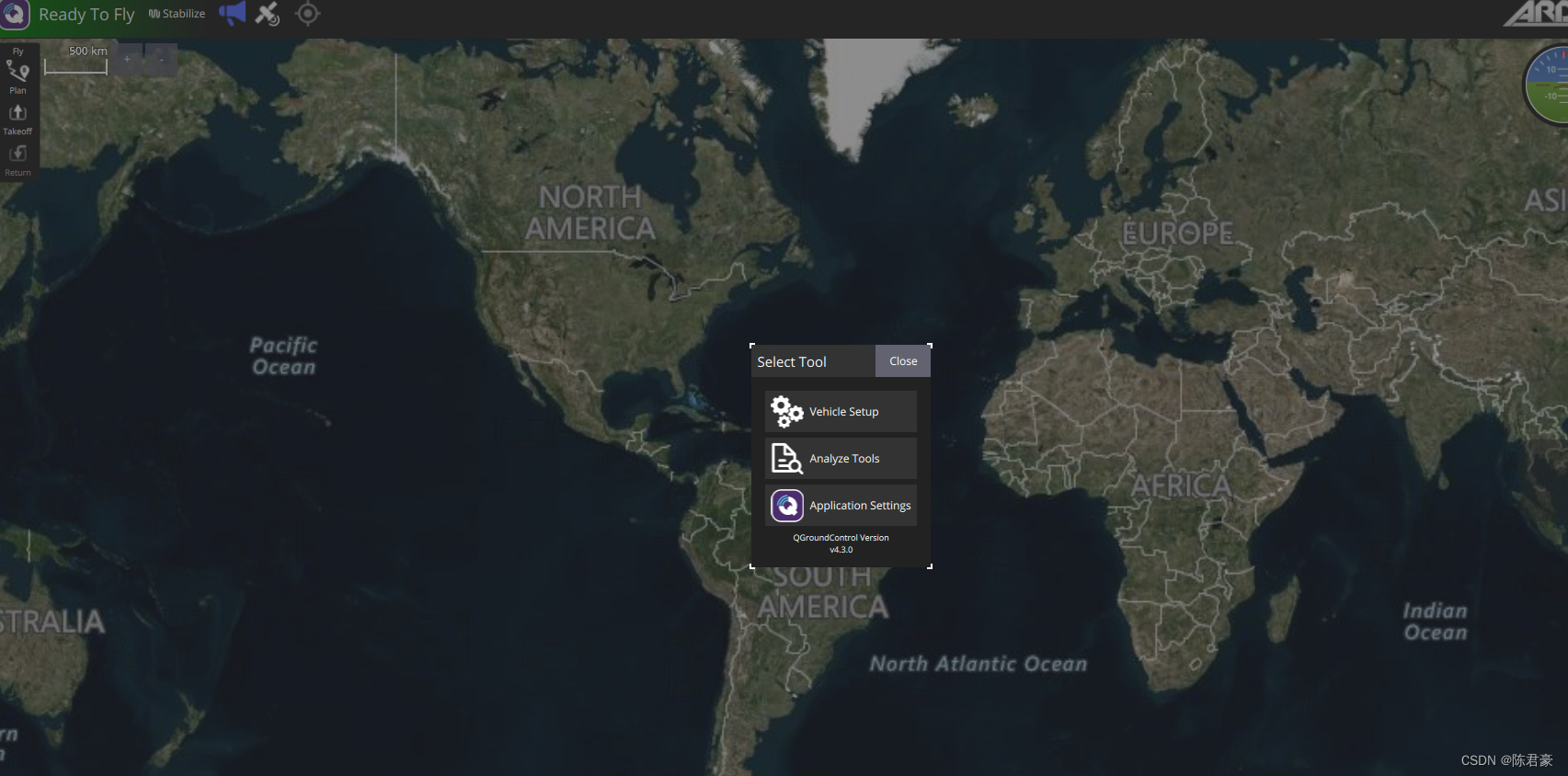
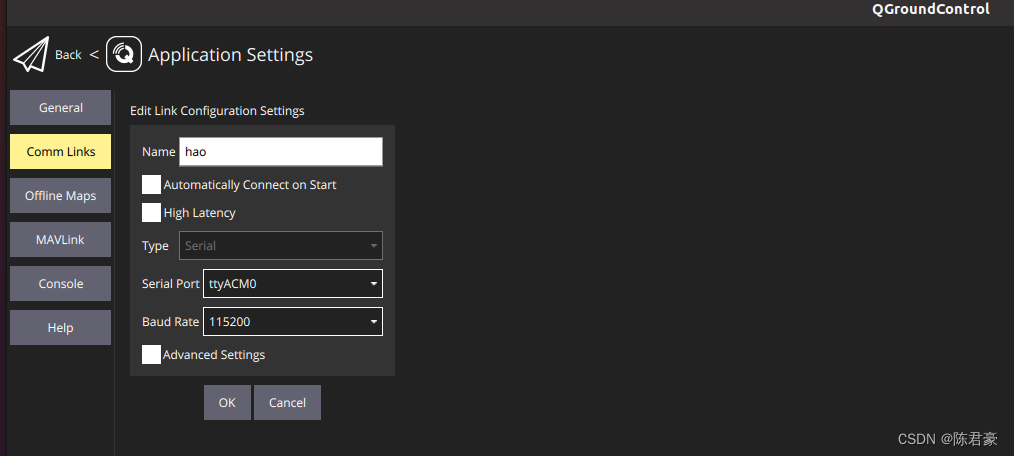
點擊Aplication Settings會出現六個選項卡. 其中包括CommLinks,點擊它

點擊Add
SerialPort = ttyACM0
Baud Rate = 115200
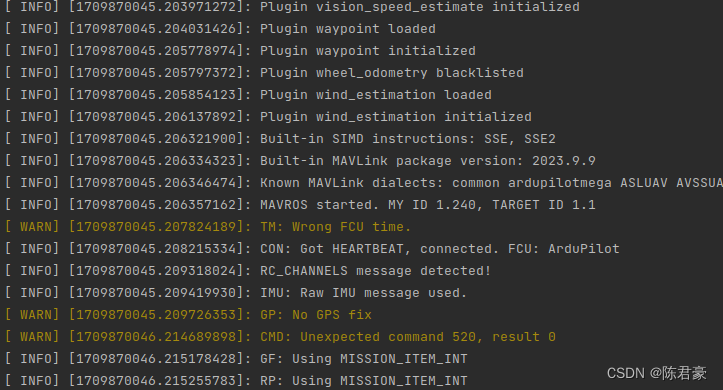
 運行 mavros
運行 mavros
sudo chmod 777 /dev/ttyACM0roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:115200這裏注意MAVROS started之後,如果正確的設定了,會有IMU的信息
這裏顯示的是IMU:Raw IMU message used
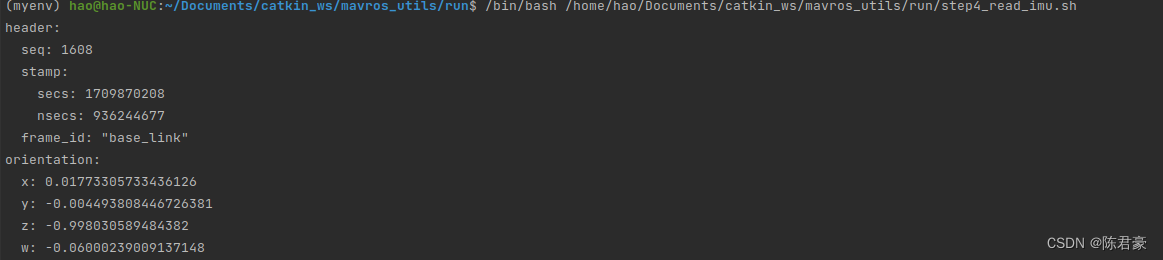
再開一個Ternimal運行
rostopic echo /mavros/imu/data









)







strlen函数模拟实现(三种方法))
![[AutoSar]BSW_Com010 CAN IF 模块介绍](http://pic.xiahunao.cn/[AutoSar]BSW_Com010 CAN IF 模块介绍)
