STM32 学习9 中断、外部中断及定时器中断
- 一、STM32中断介绍
- 一、STM32中断介绍
- 1. 什么是中断?
- 2. 中断在嵌入式系统中的作用和重要性
- 3. STM32中断的概述
- 4. 中断的优先级
- 4.1 中断优先级级别
- 4.2 中断优先级分类
- (1)硬件优先级
- (2)响应速度优先级
- (3)重要性优先级
- (4)任务优先级
- 4.3 中断优先级设置
- 4.4 中断优先级规则
- 二、STM32中断编程
- 1. 使用能外设某个中断
- (1)使能中断
- (2)配置中断触发条件
- 2. 设置中断优先级分组
- 3. 编写中断服务函数
- 三、外部中断
- 1. 概念
- 2. EXTI
- 3. EXTI 框图
- 4. EXTI中断/事件线路
- 5. 外部中断使用步骤
- 6. 示例
- (1)exti_utils.h
- (2)exti_utils.c
- 六、定时器中断
- 1. 简介
- 2. 通用定时器简介
- (1)时基单元
- (2)计数器模式
- (3)时钟选择
- (4)输入通道
- (5)捕获通道
- (6)定时器级联
- (7)定时器中断
- 3. 定时时间计算公式
- 4. 配置步骤
- (1)选择定时器模块
- (2) 初始化时钟
- (3)初始化定时器参数
- (4)设置定时器中断类型,并使能
- (5)使能
- (6)配置中断优先级
- (7)中断服务函数
- 5. 示例
- (1)timx_utils.h
- (2)timx_utils.c
- (3)main.c
- 七、中断嵌套
- 1. 概念
- 2. 中断的实现方式
一、STM32中断介绍
一、STM32中断介绍
1. 什么是中断?
中断是一种计算机编程中的技术,用于在程序执行期间暂停当前任务,转而执行预定义的中断服务程序(ISR),处理特定的事件或信号。
中断机制允许系统对实时事件做出及时响应,而不必用循环去等待特定事件的发生。
2. 中断在嵌入式系统中的作用和重要性
在嵌入式系统中,特别是在实时系统中,对一些事件的即时响应至关重要。例如:传感器数据的读取、定时器溢出、外部输入信号等都是需要及时处理的事件。
使用中断可以确保系统能够在这些事件发生时立即作出响应,而不会因为等待而造成延迟或丢失数据。
3. STM32中断的概述
STM32系列微控制器提供了丰富的中断支持,包括但不限于外部中断、定时器中断、串口中断和DMA中断等。
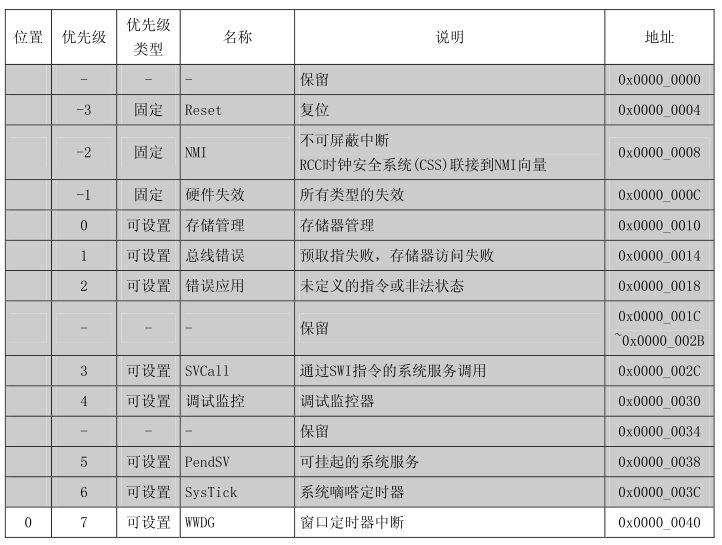
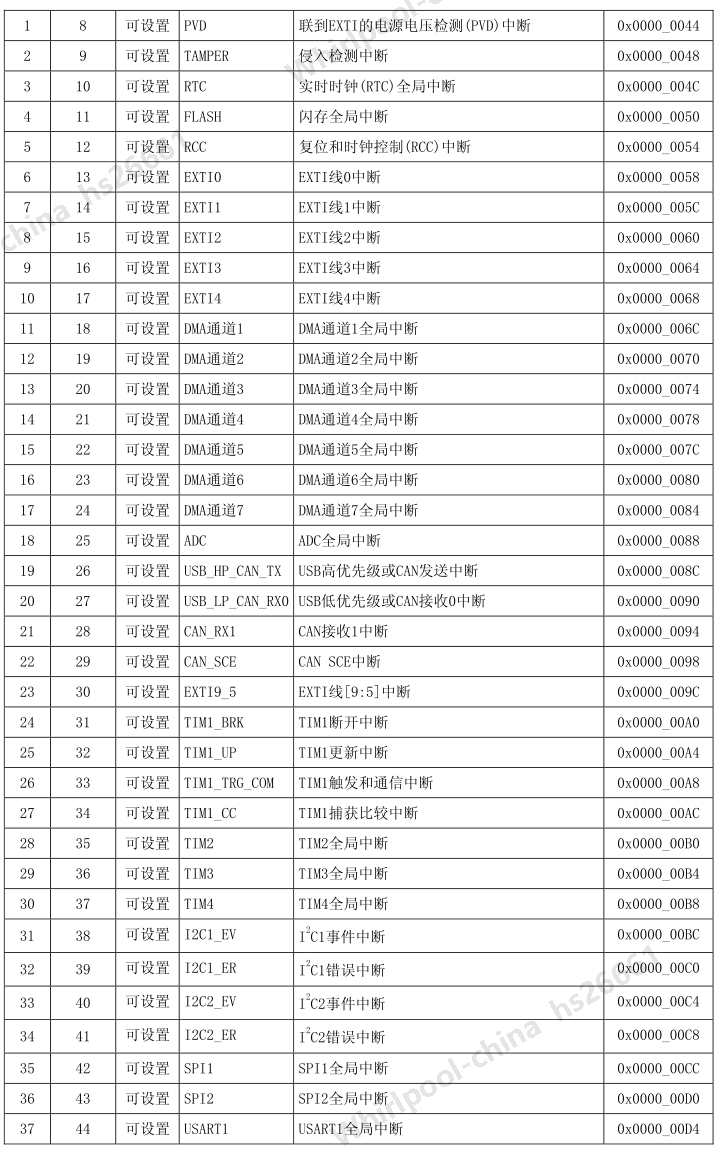
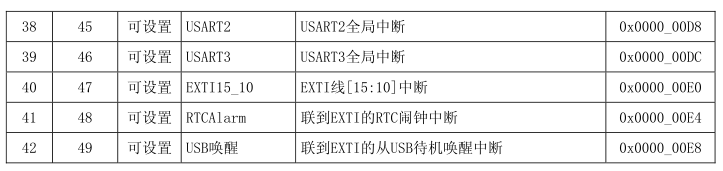
STM32F10x芯片有84个中断通道,包括16个内核中断和68个可屏蔽中断,在《STM32F10x中文参考手册》第65页有向量表进行了详细介绍,摘录如下:
4. 中断的优先级
在STM32系列微控制器中,中断优先级决定了当多个中断同时发生时,哪一个中断将被优先处理。
4.1 中断优先级级别
中断优先级通常是一个整数,STM32F103使用中断优先级控制字节的高4位,0为最高优先级,15为最低优先级。
STM32系列微控制器通常将中断分为多个组,每个组有自己的优先级范围。例如,对于外部中断,可以有4个组,每个组可以有16个优先级。
4.2 中断优先级分类
以下是几种常见的中断优先级分类方式:
(1)硬件优先级
硬件优先级是指微控制器硬件提供的中断优先级机制。在STM32系列微控制器中,中断的硬件优先级通常是一个数字,数字越小,优先级越高。例如,优先级0是最高优先级,15是最低优先级。开发者可以根据需要为每个中断设置不同的硬件优先级。
(2)响应速度优先级
响应速度优先级是根据中断需要被多快地响应来确定的。一些紧急事件可能需要立即得到处理,因此这些中断会被分配更高的优先级,以确保系统能够及时响应。例如,定时器溢出中断可能比普通外部中断更加紧急,因此可以为定时器中断分配更高的优先级。
(3)重要性优先级
重要性优先级是根据中断对系统功能的重要性来确定的。一些关键的系统功能可能需要被优先处理,以确保系统的正常运行。例如,系统故障中断可能比其他一般中断更加重要,因此可以为系统故障中断分配更高的优先级。
(4)任务优先级
任务优先级是根据中断所执行的任务的重要性来确定的。系统中可能存在多个任务,这些任务有不同的优先级。中断的优先级可以根据所执行的任务的重要性来确定,以确保系统能够优先处理重要任务。
4.3 中断优先级设置
在STM32中,中断优先级的设置是通过NVIC(Nested Vectored Interrupt Controller,嵌套向量中断控制器)进行的。
NVIC属于M3内核的一个外设,控制着芯片的中断功能。ARM给NVIC预留的功能比较多,而M3内核进行了裁剪。
中断控制器相关的寄存器在固件库的core_cm3.h 文件NVIC结构体里定义,常见的寄存器有:
- NVIC_ISERx 使用中断寄存器
- NVIC_ICERx 禁用中断
- NVIC_ISPRx 设置中断挂起
- NVIC_ICPRx 清除中断的挂起状态
- NVIC_IPRx 设置中断优先级
- NVIC_STIR 用于软件触发中断
- NVIC_ICSR 提供了一些中断相关的状态和控制位
我们可以通过NVIC接口函数来配置中断的优先级,常用的函数包括NVIC_SetPriority()和NVIC_SetPriorityGrouping()等。通过这些函数,可以将不同中断设置为不同的优先级,并根据实际需求进行灵活配置。
4.4 中断优先级规则
在设置中断优先级时,需要遵循一定的规则,以确保系统的正确性和稳定性:
- 优先级较低的中断可以被较高优先级的中断抢占。换句话说,当一个中断正在执行时,如果发生了优先级更高的中断,系统会立即转去执行更高优先级的中断服务程序。
- 优先级相同的中断,先被触发的中断会先被处理。即如果多个中断同时发生,并且优先级相同,则先触发的中断会先得到处理。
二、STM32中断编程
1. 使用能外设某个中断
(1)使能中断
(2)配置中断触发条件
2. 设置中断优先级分组
初始化 NVIC_InitTypeDef 结构体:
typedef struct
{uint8_t NVIC_IRQChannel; // 中断源设置uint8_t NVIC_IRQChannelPreemptionPriority; // 抢占优先级uint8_t NVIC_IRQChannelSubPriority; // 响应优先级FunctionalState NVIC_IRQChannelCmd; // 中断使能或失能
}
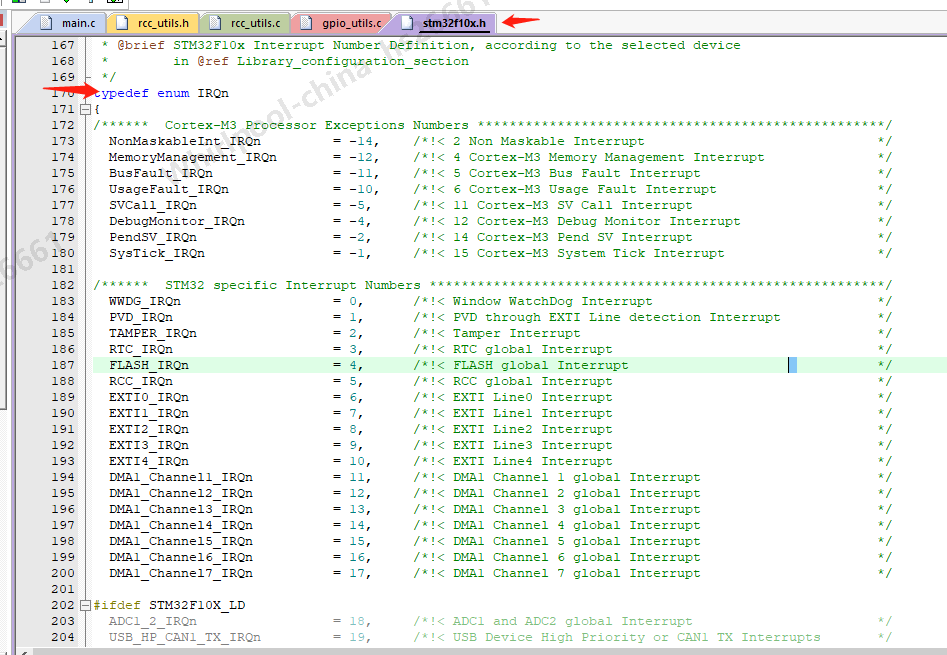
NVIC_IRQChannel中断源可以在 stm32f10x.h 头文件中查到:
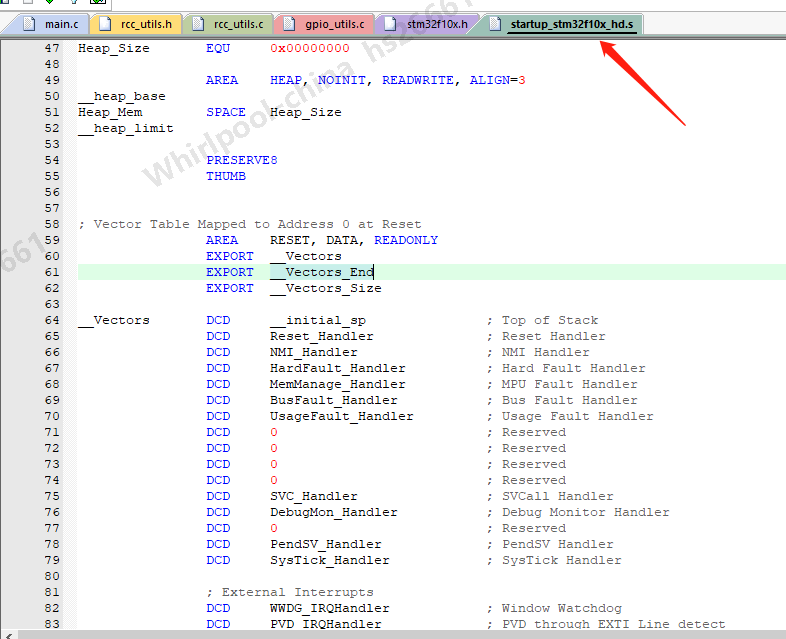
3. 编写中断服务函数
void EXTI0_IRQHandler(void)
{// 处理外部中断0发生时的事件// 例如,读取外部输入引脚状态、清除中断标志等// 清除中断挂起标志位EXTI_ClearITPendingBit(EXTI_Line0);
}中断服务的函数名称在启动文件中定义,建议不要修改:
三、外部中断
1. 概念
外部中断是STM32系列微控制器中的一种中断类型,它允许外部事件(如外部输入引脚状态的变化)触发中断,从而使系统能够实时响应外部的输入信号。外部中断常用于处理外部设备的输入,如按钮、传感器等。
2. EXTI
外部中断线路管理器(External Interrupt/Event Controller,EXTI)是STM32系列微控制器中的一个重要外设,用于管理外部中断和事件的触发和处理。
STM32F10x EXTI包含多达19个用于产生事件/中断请求的边沿检测器。
EXTI允许外部事件(例如GPIO引脚状态的变化)触发中断,可以选择类型(中断或事件)和相应的触发事件(上升沿触发、下降沿触发或边沿触发),从而实现对外部输入信号的实时响应。还可以独立地屏蔽EXTI中断。
下面是部分EXTI中断向量表:
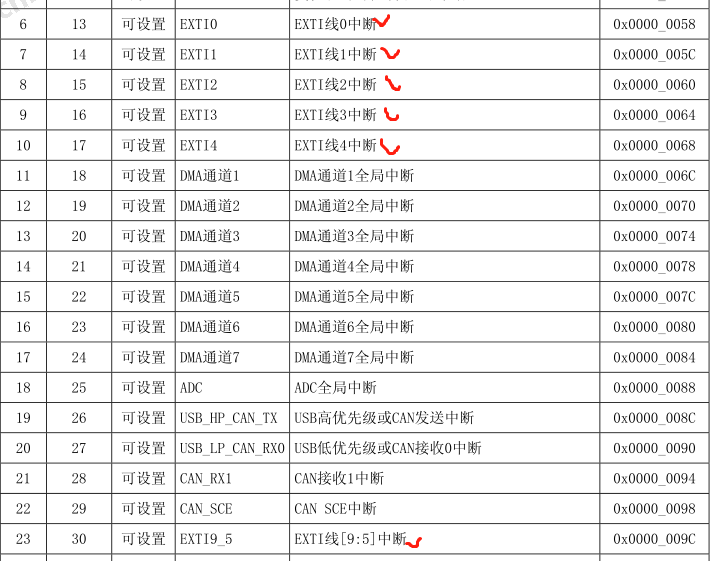
除了EXTI, 另外 RTCAlarm、USB唤醒、PVD电源检测中断、ETH_WKUP 等外部中断。
3. EXTI 框图
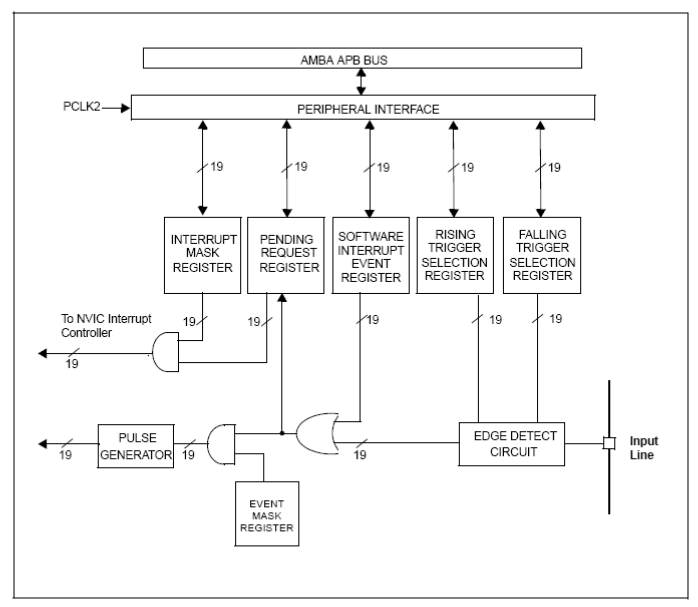
4. EXTI中断/事件线路
| EXTI线路 | 说明 |
|---|---|
| EXTI 线 0~15 | 对应外部IO 口的输入中断 |
| EXTI 线 16 | 连接PVD输出 |
| EXTI 线17 | 连接到RTC闹钟事件 |
| EXTI 线 18 | 连接到USB唤醒事件 |
| EXTI 线19 | 连接到以太网唤醒事件,联网型芯片 |
5. 外部中断使用步骤
- 使能外部中断:通过配置外部中断线路管理器(EXTI)和GPIO外设,使能外部中断功能;
// 使能外部中断线0NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; // 外部中断0NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x01; // 抢占优先级为1NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x01; // 响应优先级为1NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);
- 开启AFIO 时钟,设置IO口与中断线映射关系;
- 配置中断分组,使能中断;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 选择优先级分组方式,这里选择分组2- 初始化EXTi,选择触发方式;
初始化使用EXTI_InitStruct函数;
// 初始化外部中断线路管理器(EXTI)EXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line = EXTI_Line0; // 使用外部中断线0EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 设置为中断模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising; // 上升沿触发EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能外部中断线0EXTI_Init(&EXTI_InitStruct);
- 编写EXTI中断服务函数
- EXTI0_IRQHandler
- EXTI1_IRQHandler
- EXTI2_IRQHandler
- EXTI3_IRQHandler
- EXTI4_IRQHandler
- EXTI9_5_IRQHandler
- EXTI5_10_IRQHandler
6. 示例
本实例使用的开发板 GPIO 按键电路:
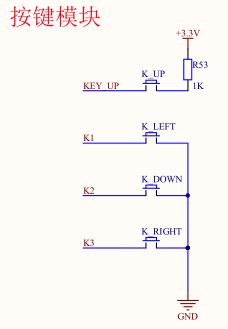
对于开发板的K1、K2、K3 使用下降沿触发,
KEY_UP 使用上升沿触发。对应的引脚:
- KEY_UP:GPIOA GPIO_Pin0 引脚
- KEY_LEFT:GPIOE GPIO_Pin2 引脚
- KEY_RIGHT:GPIOE_GPIO_Pin4 引脚
- KEY_DOWN:GPIOE_GPIO_Pin3 引脚
(1)exti_utils.h
#ifndef __exti_utils_h__
#define __exti_utils_h__#include "stm32f10x.h"
void custom_exti_init(void);
#endif(2)exti_utils.c
#include "exti_utils.h"
#include "stdio.h"
#include "sys_tick_utils.h"
#include "led_utils.h"
#include "key_utils.h"/*** @brief 外部中断初始化
*/
void custom_exti_init(void) {// 开启AFIO时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);// GPIO 引脚映射到 EXTI 中断线GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);// GPIOE 映射到 EXTI 中断线GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource2);GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource3);GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource4);// 配置外部中断0的优先级NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x02; // 抢占优先级为1NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x03; // 响应优先级为3NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);NVIC_InitStruct.NVIC_IRQChannel = EXTI2_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x02; // 抢占优先级为1NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x02; // 响应优先级为2NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);NVIC_InitStruct.NVIC_IRQChannel = EXTI3_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x02; // 抢占优先级为1NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x1; // 响应优先级为1NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);NVIC_InitStruct.NVIC_IRQChannel = EXTI4_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x02; // 抢占优先级为1NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x0; // 响应优先级为0NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);// 初始化外部中断线路管理器(EXTI)EXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line = EXTI_Line0; // 外部中断线0EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising; // 上升沿触发EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能外部中断线0EXTI_Init(&EXTI_InitStruct);EXTI_InitStruct.EXTI_Line = EXTI_Line2; // 外部中断线2EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling; // 下降沿触发EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能外部中断线0EXTI_Init(&EXTI_InitStruct);EXTI_InitStruct.EXTI_Line = EXTI_Line3; // 外部中断线2EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling; // 下降沿触发EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能外部中断线0EXTI_Init(&EXTI_InitStruct);EXTI_InitStruct.EXTI_Line = EXTI_Line4; // 外部中断线2EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling; // 下降沿触发EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能外部中断线0EXTI_Init(&EXTI_InitStruct);
}
/*** @brief 外部中断0中断服务函数
*/
void EXTI0_IRQHandler(void) {if (EXTI_GetITStatus(EXTI_Line0) != RESET) {delay_ms(10);if (key_up_value == 1) {led_lightn(0);EXTI_ClearITPendingBit(EXTI_Line0); // 清除中断标志位return;}}
}
/*** @brief 外部中断2中断服务函数
*/
void EXTI2_IRQHandler(void) {if (EXTI_GetITStatus(EXTI_Line2) != RESET) {delay_ms(10);if (key_left_value == 0) {led_lightn(2);EXTI_ClearITPendingBit(EXTI_Line2); // 清除中断标志位return;}}
}
/*** @brief 外部中断3中断服务函数
*/
void EXTI3_IRQHandler(void) {if (EXTI_GetITStatus(EXTI_Line3) != RESET) {delay_ms(10);if (key_down_value == 0) {led_lightn(1);EXTI_ClearITPendingBit(EXTI_Line3); // 清除中断标志位return;}}
}
/*** @brief 外部中断4中断服务函数
*/
void EXTI4_IRQHandler(void) {if (EXTI_GetITStatus(EXTI_Line4) != RESET) {delay_ms(10);if (key_right_value == 0) {led_lightn(3);EXTI_ClearITPendingBit(EXTI_Line4); // 清除中断标志位return;}}
}本示例的功能,在按下按键后,分别使用LED显示 0,1,2,3。
六、定时器中断
1. 简介
STM32F1系列微控制器提供了多种定时器模块,包括:
- 2个 基本定时器(TIM6和TIM7):用于生成简单的定时中断,适用于一些简单的定时任务。
- 4个 通用定时器(TIM2至TIM5):具有更多的功能和配置选项,可以实现更复杂的定时任务和PWM输出等功能。
- 2个 高级定时器(TIM1、TIM8):功能最为丰富的定时器,可以用于高级的PWM控制、编码器接口、脉冲捕获等应用。
通用定时器通常挂接在APB1;
高级定时器通常挂载在AHB上。
2. 通用定时器简介
STM32F1的通用定时器包含一个 16位 自动重载计数器(CNT),该计数器由可编程预分频器(PSC)驱动。
通用定时器支持多种工作模式,包括定时器模式、定时器中断模式、PWM输出模式、输入捕获模式和输出比较模式等。
使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒至几个毫秒间调整。
通用定时器框图:
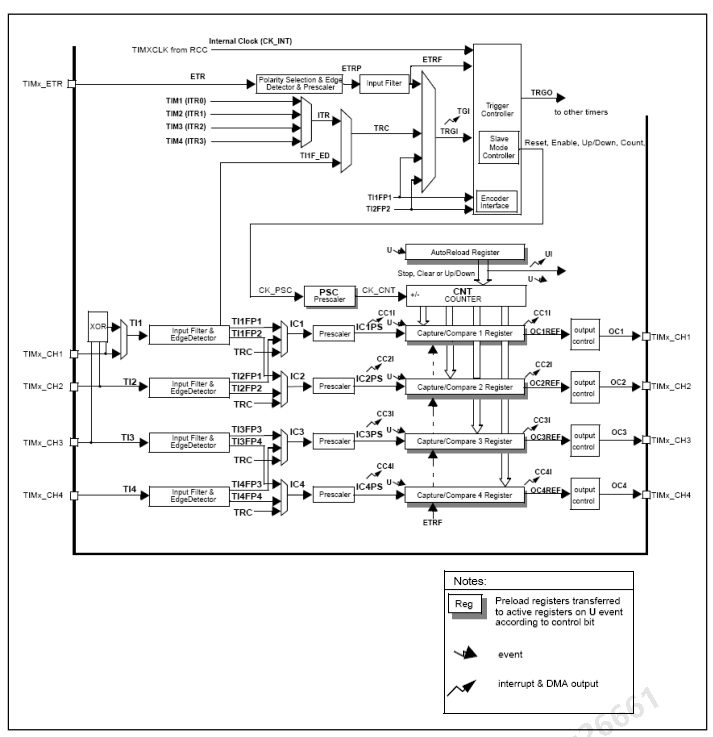
(1)时基单元
通用定时器的时基单元是指定时器的基本计时单元,它决定了定时器计数的频率和精度。时基单元包括 :
- 计数器寄存器(TIMx_CNT),16位;
- 预分频器寄存器(TIMx_PSC),16位,在1~65535之间取值;
- 自动装载寄存器(TIMx_ARR)。
预分频系数用来将定时器的时钟频率降低到一个合适的范围,以适应具体的应用需求,它的值是一个正整数,通常可以通过以下公式来计算:
[ \text{实际频率} = \frac{\text{时钟源频率}}{\text{预分频系数}} ]
(2)计数器模式
根据所选的计数器模式,定时器的计数器将以不同的方式进行计数。
- 在向上计数模式下,计数器从0开始递增;
- 在向下计数模式下,计数器从自动重装载值开始递减;
- 在中央对齐模式和双边沿对齐模式下,计数器的溢出值为自动重装载值的一半。
不同的计数器模式适用于不同的应用场景,可以根据具体的需求选择合适的模式来实现相应的功能。
(3)时钟选择
通用定时器的时钟决定了定时器的计数速率和精度。在STM32微控制器中,通用定时器可以选择多种时钟源,包括内部时钟源和外部时钟源。
常见的时钟源:
-
内部时钟源(Internal Clock Source):内部时钟源是由微控制器内部的时钟模块提供的时钟信号,通常为主时钟(HCLK)或高速内部时钟(HSI)。内部时钟源具有稳定性好、可靠性高的优点,适用于大多数应用场景。
-
外部时钟源(External Clock Source):外部时钟源是由外部晶振或外部时钟信号提供的时钟信号,通常通过外部引脚输入到微控制器内部。外部时钟源具有精度高、抗干扰能力强的特点,适用于对时钟精度有较高要求的应用场景。
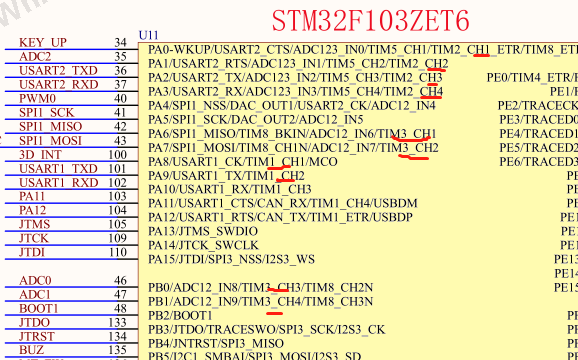
(4)输入通道
通用定时器包含4个独立通道(TIMx_CH1-4),每个通道对应芯片的引脚,如下图所示:
(5)捕获通道
捕获通道是通用定时器(TIM)中用于捕获外部事件(如输入脉冲)时间戳的通道。在捕获模式下,定时器可以监视一个外部信号的边沿触发,并记录下此时计数器的值,从而得到外部事件的时间戳信息。捕获通道通常用于测量脉冲宽度、频率、周期等应用场景,其主要特点:
- 外部事件捕获:捕获通道允许定时器监视外部信号的变化,如上升沿或下降沿,以捕获外部事件的时间戳。
- 多通道支持:通用定时器通常支持多个捕获通道,每个通道可以独立地捕获外部事件的时间戳。
- 精确度高:由于定时器的高精度计数器和硬件触发机制,捕获通道可以实现很高的时间精度和稳定性。
(6)定时器级联
如果使用外部信号控制定时器,可实现多个定时器互连(使用一个定时器控制另一个定时器)。
(7)定时器中断
通用定时器(TIM)在STM32微控制器中可以产生多种类型的中断,常见的中断包括:
-
更新中断(Update Interrupt):当定时器的计数器溢出或者自动重装载值被加载到计数器时,会产生更新事件,从而触发更新中断。更新中断是定时器最基本的中断类型,用于处理定时器计数周期结束时的事件。
-
比较/捕获中断(Compare/Capture Interrupt):定时器可以配置为输出比较模式或输入捕获模式,在这些模式下,当计数器的值与比较值相等或者外部事件触发捕获时,会产生比较/捕获事件,从而触发比较/捕获中断。比较/捕获中断用于处理定时器与外部事件的相关操作。
-
触发中断(Trigger Interrupt):定时器可以配置为外部时钟模式或触发输入模式,在这些模式下,当外部触发事件到来时,会产生触发事件,从而触发触发中断。触发中断用于处理外部触发事件的相关操作。
-
DMA请求中断(DMA Request Interrupt):当定时器的更新、比较或捕获事件发生时,可以产生DMA请求,从而触发DMA请求中断。DMA请求中断用于处理DMA传输相关的操作。
3. 定时时间计算公式
定时器定时时间的公式可以通过以下方式进行计算:
T o u t = ( p e r i o d ∗ ( p s c + 1 ) ) T c l k T_{out} = \frac{(period * (psc+1))}{T_{clk}} Tout=Tclk(period∗(psc+1))
4. 配置步骤
通用定时器的配置步骤通常包括以下几个关键步骤:
(1)选择定时器模块
首先确定要使用的通用定时器模块,通常有 TIM1、TIM2、TIM3、TIM4 等可供选择,根据具体的需求选择合适的定时器模块。
(2) 初始化时钟
// 使能TIM4时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
(3)初始化定时器参数
需要初始化自动重装值,分频系数,计数方式等。
// 定时器配置TIM_TimeBaseInitTypeDef TIM_InitStruct;TIM_InitStruct.TIM_Prescaler = 36000 - 1; // 预分频系数,1~65535,实际值会自动加1TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式TIM_InitStruct.TIM_Period = 1000; // 自动重装载值,即定时器周期TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频TIM_InitStruct.TIM_RepetitionCounter = 0; // 重复计数器,高级计数器使用TIM_TimeBaseInit(TIM2, &TIM_InitStruct);
这里计算的定时时间为:
1000 ∗ 36000 72 M = 0.5 ( 秒 ) \frac{1000 * 36000}{72M}=0.5(秒) 72M1000∗36000=0.5(秒)
其中的频率是APB1总线频率*2。
(4)设置定时器中断类型,并使能
// 定时器配置TIM_TimeBaseInitTypeDef TIM_InitStruct;// 此处配置定时器的参数,如预分频系数、计数器模式、自动重装载值等// 初始化定时器TIM_TimeBaseInit(TIM2, &TIM_InitStruct);// 使能更新中断TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
(5)使能
// 使能定时器TIM_Cmd(TIM2, ENABLE);
(6)配置中断优先级
// 配置定时器中断优先级NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);
(7)中断服务函数
void TIM2_IRQHandler(void) {if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {// 处理定时器更新中断事件// 清除中断标志位TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
5. 示例
本示例通过定时器中断控制LED闪烁。
(1)timx_utils.h
#ifndef __TIMX_UTILS_H__
#define __TIMX_UTILS_H__
#include "stm32f10x.h"
void timx_init(u16 preriod, u16 psc);
void timx_init_ms(u16 ms);
#endif(2)timx_utils.c
#include "timx_utils.h"
#include "led_utils.h"
#include "stm32f10x.h"/*** @brief 初始化定时器* @param preriod: 自动重装载寄存器周期值* @param prescaler: 时钟预分频数
*/
void timx_init(u16 preriod, u16 prescaler)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);TIM_TimeBaseStructure.TIM_Period = preriod;TIM_TimeBaseStructure.TIM_Prescaler = prescaler;TIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;// 初始化TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);// 中断使能TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);// 使能定时器TIM_Cmd(TIM4, ENABLE);// 中断优先级NVIC设置NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
}
/*** @brief 初始化定时器* @param ms: 定时器中断时间
*/
void timx_init_ms(u16 ms)
{// 直接调用 timx_init 函数timx_init(ms*2, 36000-1);
}static u8 n=0;void TIM4_IRQHandler(void)
{if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET){led_lightn(n);n++;if(n>9){n=0;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update);}
}(3)main.c
#include "gpio_utils.h"
#include "stm32f10x.h"
#include "sys_tick_utils.h"
#include "led_utils.h"
#include "exti_utils.h"
#include "timx_utils.h"// 主函数
int main(void)
{GPIO_Configuration(); //调用GPIO配置函数sys_tick_init(72);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 定时器的时钟频率是72MHz,预分频系数是36000,// 所以定时器的时钟频率是72MHz/36000=2KHz,周期是1000,// 所以定时器的周期是1000/2KHz=0.5stimx_init_ms(1000);led_all_off();while (1) //无限循环{delay_ms(10);}
}七、中断嵌套
1. 概念
中断嵌套是指在一个中断服务程序(ISR)中允许发生另一个中断的情况。简单来说,就是当一个中断正在处理时,如果发生了另一个中断,系统能够暂时中断当前的中断处理流程,转而处理新的中断请求,待新的中断处理完成后再返回继续处理原先的中断。
在嵌套中断系统中,通常存在多个中断优先级,每个中断都有其自己的优先级,高优先级的中断可以抢占正在执行的低优先级中断。这样可以确保高优先级的事件能够得到及时处理,提高了系统对紧急事件的响应能力。
2. 中断的实现方式
中断嵌套的实现通常需要硬件和软件的支持。
- 硬件需要提供支持多级中断优先级的中断控制器,如STM32系列微控制器中的嵌套向量中断控制器(NVIC)。
- 软件方面则需要编写合适的中断服务程序,并在其中实现中断优先级的管理和中断处理的逻辑。
本文代码开源地址:
https://gitee.com/xundh/stm32_arm_learn

:nuxt.config.js配置文件)



)


)







)


