Vue.js2+Cesium1.103.0 十五、绘制视锥,并可实时调整视锥姿态
Demo
<template><divid="cesium-container"style="width: 100%; height: 100%;"/>
</template><script>
/* eslint-disable no-undef */
/* eslint-disable new-cap */
/* eslint-disable no-unused-vars */
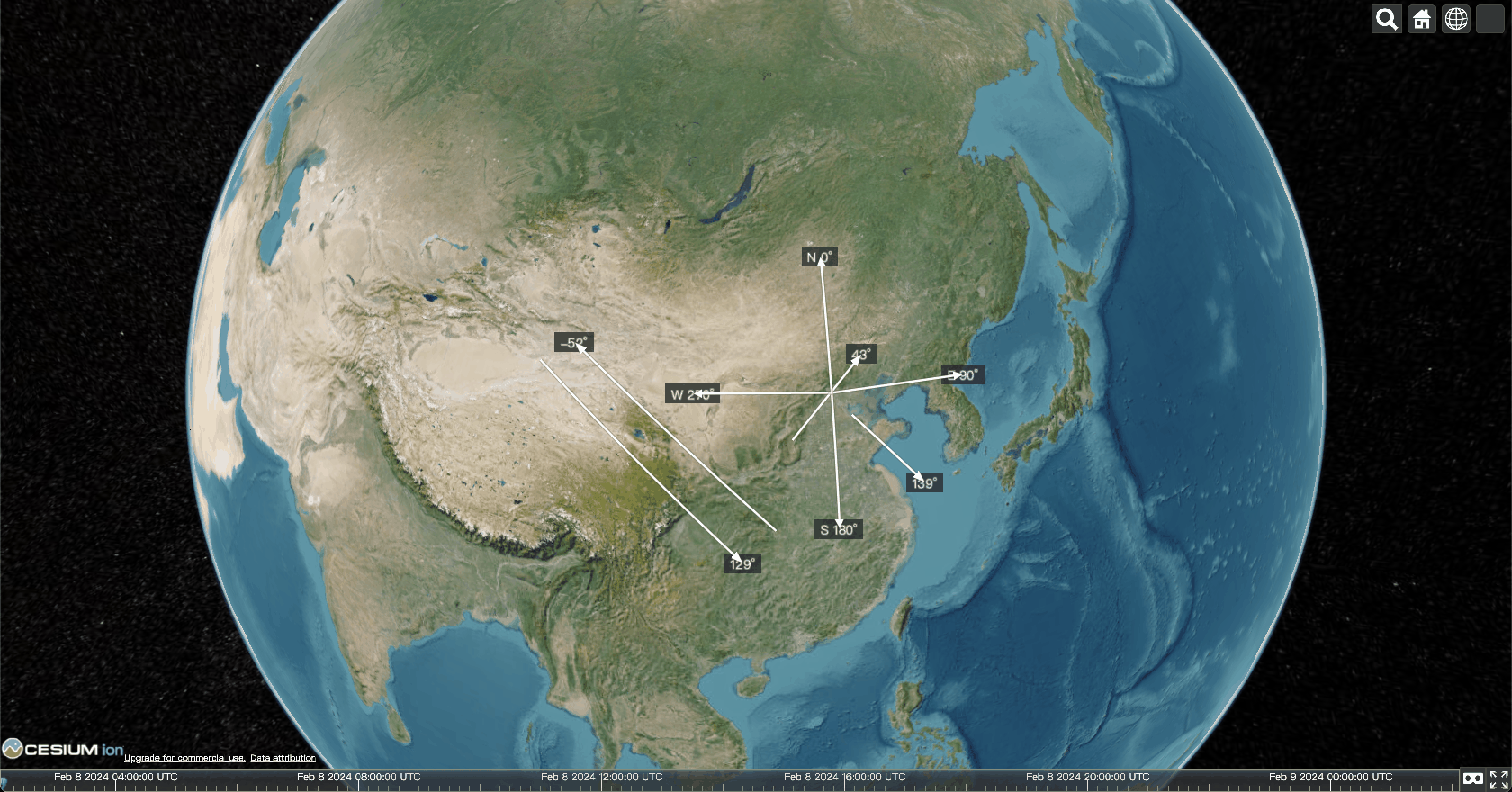
/*** 根据两个坐标,计算连接的线段与正北的夹角**/
import * as turf from '@turf/turf'
export default {data() {return {}},computed: {},watch: {},mounted() {window.$InitMap()viewer.camera.flyTo({destination: Cesium.Rectangle.fromDegrees(100, 10, 120, 70)})const altitude = 100000const distance = 1000const pointO = {longitude: 116.407387,latitude: 39.904179,altitude: altitude}const pointN = {label: 'N 0°',longitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,0).geometry.coordinates[0],latitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,0).geometry.coordinates[1],altitude: altitude}const pointE = {label: 'E 90°',longitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,90).geometry.coordinates[0],latitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,90).geometry.coordinates[1],altitude: altitude}const pointS = {label: 'S 180°',longitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,180).geometry.coordinates[0],latitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,180).geometry.coordinates[1],altitude: altitude}const pointW = {label: 'W 270°',longitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,270).geometry.coordinates[0],latitude: turf.rhumbDestination(turf.point([pointO.longitude, pointO.latitude]),distance,270).geometry.coordinates[1],altitude: altitude}const list = [pointN, pointE, pointS, pointW]for (let index = 0; index < list.length; index++) {const point = list[index]viewer.entities.add(new Cesium.Entity({position: Cesium.Cartesian3.fromDegrees(point.longitude,point.latitude,point.altitude),label: {font: '14px sans-serif',text: point.label,fillColor: new Cesium.Color.fromCssColorString('#fff'),outlineColor: new Cesium.Color.fromCssColorString('#fff'),outlineWidth: 1,// verticalOrigin: Cesium.VerticalOrigin.CENTER,// horizontalOrigin: Cesium.HorizontalOrigin.CENTER,showBackground: true},polyline: {positions: Cesium.Cartesian3.fromDegreesArrayHeights([pointO.longitude,pointO.latitude,pointO.altitude,point.longitude,point.latitude,point.altitude]),width: 10,material: new Cesium.PolylineArrowMaterialProperty(new Cesium.Color.fromCssColorString('#fff').withAlpha(1))}}))}const lines = [[{longitude: 112.9634812162806,latitude: 36.97040252777073,altitude},{longitude: 119.32663938454708,latitude: 42.26995861317594,altitude}],[{longitude: 117.9592990653408,latitude: 38.38163978720803,altitude},{longitude: 123.42464237870345,latitude: 33.296977534577685,altitude}],[{longitude: 111.53663125569267,latitude: 30.989726449061138,altitude},{longitude: 93.66207819341395,latitude: 42.32870629780615,altitude}],[{longitude: 90.91200448882437,latitude: 40.709266162020185,altitude},{longitude: 109.04284513782429,latitude: 28.780767151167282,altitude}]]for (let index = 0; index < lines.length; index++) {const line = lines[index]const angle = turf.rhumbBearing(turf.point([line[0].longitude, line[0].latitude]),turf.point([line[1].longitude, line[1].latitude]))viewer.entities.add(new Cesium.Entity({position: Cesium.Cartesian3.fromDegrees(line[1].longitude,line[1].latitude,line[1].altitude),label: {font: '14px sans-serif',text: `${angle.toFixed(0)}°`,fillColor: new Cesium.Color.fromCssColorString('#fff'),outlineColor: new Cesium.Color.fromCssColorString('#fff'),outlineWidth: 1,verticalOrigin: Cesium.VerticalOrigin.CENTER,horizontalOrigin: Cesium.HorizontalOrigin.CENTER,showBackground: true},polyline: {positions: Cesium.Cartesian3.fromDegreesArrayHeights([line[0].longitude,line[0].latitude,line[0].altitude,line[1].longitude,line[1].latitude,line[1].altitude]),width: 10,material: new Cesium.PolylineArrowMaterialProperty(new Cesium.Color.fromCssColorString('#fff').withAlpha(1))}}))}const handler = new Cesium.ScreenSpaceEventHandler(viewer.scene.canvas)handler.setInputAction(function (event) {// 平面坐标系转笛卡尔空间直角坐标系/**position: Cartesian2 {x: 683.0753784179688, y: 512.71826171875}转Cartesian3{x: -2174106.926252774, y: 4386734.375324652, z: 4074136.167795586}*/console.log('平面坐标系转笛卡尔空间直角坐标系',viewer.scene.pickPosition(event.position))// 空间直角坐标系转经纬度const earthPosition = viewer.camera.pickEllipsoid(event.position,viewer.scene.globe.ellipsoid)const cartographic = Cesium.Cartographic.fromCartesian(earthPosition,viewer.scene.globe.ellipsoid,new Cesium.Cartographic())const longitude = Cesium.Math.toDegrees(cartographic.longitude)const latitude = Cesium.Math.toDegrees(cartographic.latitude)console.log('空间直角坐标系转经纬度',longitude,latitude,cartographic.height)}, Cesium.ScreenSpaceEventType.LEFT_CLICK)},methods: {}
}
</script><style></style>


)









)





)
