(一)安装ubuntu18.04 系统(虚拟机或者是物理机,在此不再介绍)
(二)添加ROS镜像源
apt 列表中没有ROS源,所以要手动添加
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'(三)添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654密钥添加不成功的话,跟换密钥,一直不成功的话,考虑是不是网络问题,比如不能解析域名(DNS问题)
如下图表示添加成功

(四)ROS的安装与配置
- sudo apt install ros-melodic-desktop-full
-
sudo apt-get install ros-melodic-rqt*
-
sudo apt install python-rosdep2
-
sudo rosdep init
执行第4步的时候出现
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法:
1、打开terminal控制台,输入:sudo vim /etc/hosts
2、在打开的文件末尾一行添加: 151.101.84.133 raw.githubusercontent.com
3、保存退出,在terminal中输入: sudo rosdep init
4、执行完输入:rosdep update即可
(五)执行roscore
出现如下问题:
Command 'roscore' not found, but can be installed with:
解决方法:
因为第一次安装ros可以出现了问题,所以重新执行sudo apt install ros-melodic-desktop-full
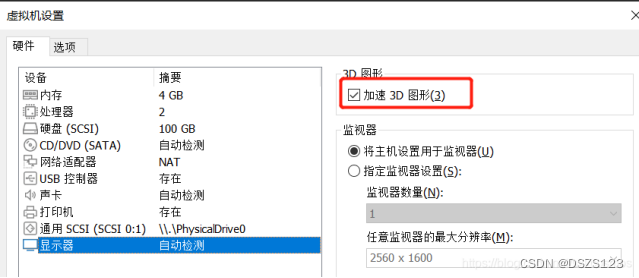
(六)执行gazebo 闪退,并报“VMware: vmw_ioctl_command error 无效的参数”错误
解决方法:去掉如下图中的对勾。

)



)








)
ADC)
。Javaee项目,springboot项目。)


