这部分内容结合了前面的内容。其实很简单,分三步走就可以:首先是通过ROS打开激光雷达,查看PCL配置需要的信息。然后是用PCL通过ROS发布的topic获取激光雷达的数据。最后将ROS和PCL结合。
实现上面两步的前提是我们已经部署好了ROS环境及PCL环境,具体操作如下:
一、通过ROS打开激光雷达
首先需要搭建好打开激光雷达的环境,这部分内容可以参照以下博址:
4.livox hap(大疆激光雷达)环境搭建_livox hap激光雷达-CSDN博客,然后根据该博址运行
source ../../devel/setup.sh
roslaunch livox_ros_driver2 rviz_HAP.launch运行成功后得到界面如下:
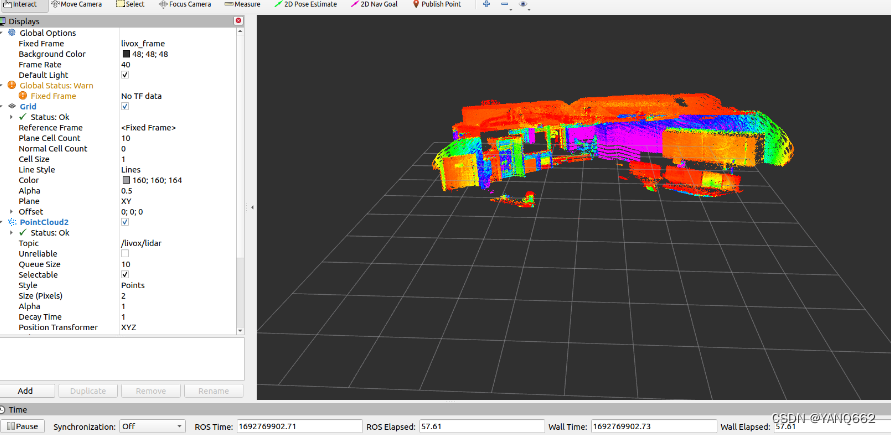
上面代码和图在以上博址有。在这个图片里我们注意两个地方:
一是记住左栏第二行的Fixed Frame后的livox_frame;二是记住左栏发布的Topic后的/livox/lidar,这两个内容是后面PCL读取数据需要的。在这里,打开雷达的环境就配置好了。
二、用PCL通过ROS发布的topic获取激光雷达的数据
PCL的详细运用可以看博址: ,在这里,直接写读取激光雷达数据的步骤(和博址有略微的差别)。
1、在home下新建文件夹
mkdir -p ~/catkin_ws/src2、进入src文件夹并初始化
cd ~/catkin_ws/src
catkin_init_workspace执行完该命令后,src目录下会多出一个 CMakeLists.txt 文件,这个文件一般不需要我们修改。
3、 返回到catkin_ws下,进行编译(注意:每次编译必须在这个ws工作空间下才能编译成功!)
cd ~/catkin_ws/
catkin_make执行完该命令后,发现工作空间catkin_ws中有三个目录: build devel src。可以从5、看到它们的作用。
4、source一下将工作空间加入环境变量
source devel/setup.bash注意: 这一步只重新加载了setup.bash文件。如果关闭并打开一个新的命令行窗口,也需要再输入该命令将得到同样的效果。
所以建议采用一劳永逸的方法:.
5、.bashrc文件在用户的home文件夹(/home/USERNAME/.bashrc)下。每次用户打开终端,这个文件会加载命令行窗口或终端的配置。所以可以添加命令或进行配置以方便用户使用。在bashrc文件添加source命令:
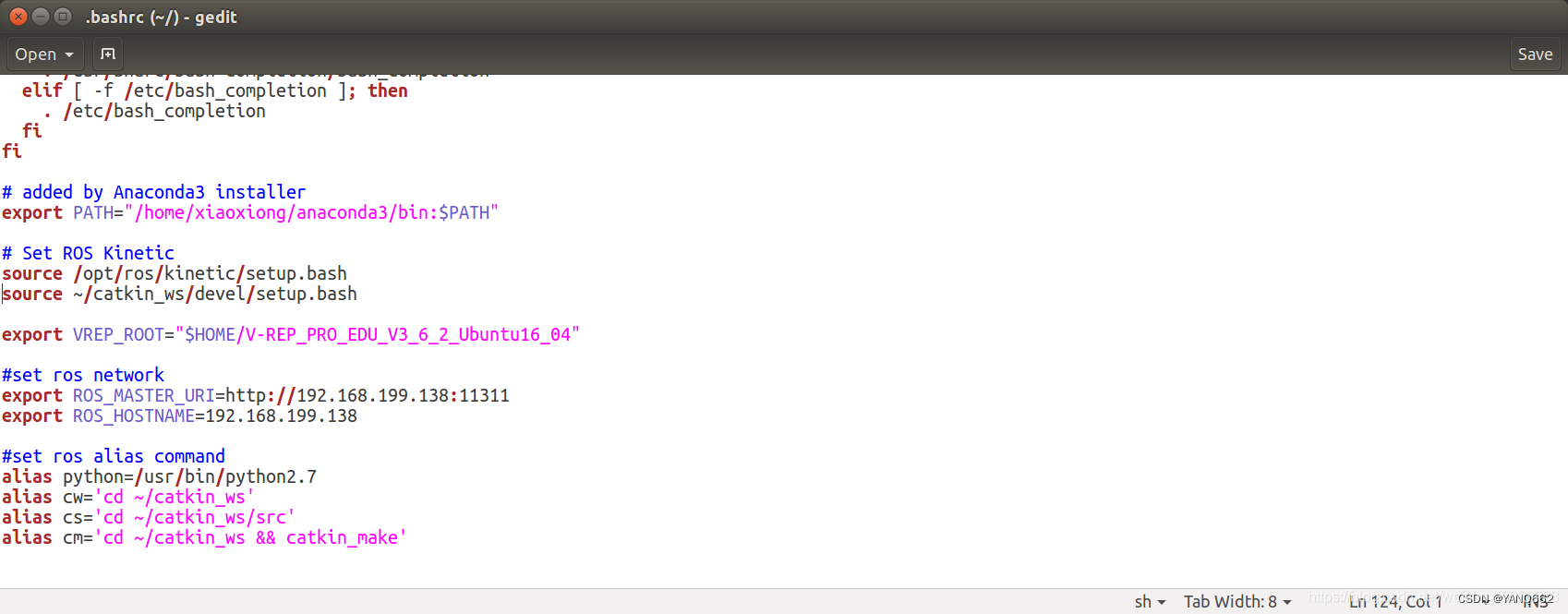
echo "source ~/catkin_ws/devel/setup.bash">> ~/.bashrc或者也可以打开.bashrc文件采用手动修改的方式添加source ~/catkin_ws/devel/setup.bash:
gedit ~/.bashrc添加完毕,你的bashrc文件应该有两句source:
添加完后,在 .bashrc的同目录下运行
~/.bashrc5、理解工作空间
工作空间结构:
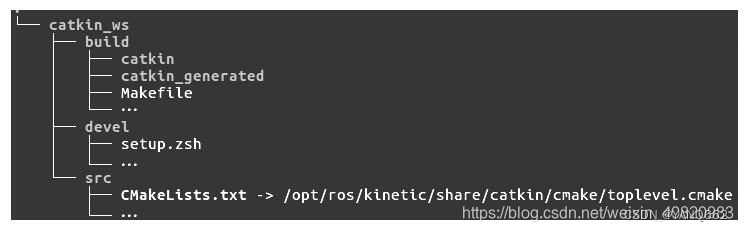
源空间(src文件夹),放置了功能包、项目、复制的包等。在这个空间中,,最重要的一个文件是CMakeLists.txt。当在工作空间中配置包时,src文件夹中有CMakeLists.txt因为cmake调用它。这个文件是通过catkin_init_workspace命令创建的。
编译空间(build space):在build文件夹里,cmake和catkin为功能包和项目保存缓存信息、配置和其他中间文件。
开发空间(Development(devel)space):devel文件夹用来保存编译后的程序,这些是无须安装就能用来测试的程序。一旦项目通过测试,就可以安装或导出功能包从而与其他开发人员分享。
一、创建节点发布点云数据并可视化
1、在ros工作空间的src目录下新建包(包含依赖项)
catkin_create_pkg chapter10_tutorials pcl_conversions pcl_ros pcl_msgs sensor_msgs2、在软件包中新建src目录
rospack profile
roscd chapter10_tutorials
mkdir src3、在src目录下新建pcl_write.cpp,topic为“/livox/lidar"发布。frame设为livox_frame(这两个信息是从第一步得到的)。
注意:以下代码也有个地方要改为/livox/lidar,在这里已经修改好了,如果你们的topic不同,则自己需要修改。
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/pcd_io.h>void cloudCB(const sensor_msgs::PointCloud2 &input)
{pcl::PointCloud<pcl::PointXYZ> cloud;pcl::fromROSMsg(input, cloud);pcl::io::savePCDFileASCII ("0.pcd", cloud);
}main (int argc, char **argv)
{ros::init (argc, argv, "pcl_write");ros::NodeHandle nh;ros::Subscriber bat_sub = nh.subscribe("/livox/lidar", 10, cloudCB);ros::spin();return 0;
}4、修改cmakelist.txt内容
cmake_minimum_required(VERSION 2.8.3)
project(chapter10_tutorials)
find_package(catkin REQUIRED COMPONENTSpcl_conversionspcl_rosroscppsensor_msgsrospy
)find_package(PCL REQUIRED)
catkin_package()include_directories(${catkin_INCLUDE_DIRS}${PCL_INCLUDE_DIRS}
)link_directories(${PCL_LIBRARY_DIRS})add_executable(pcl_write src/pcl_write.cpp)target_link_libraries(pcl_write ${catkin_LIBRARIES} ${PCL_LIBRARIES})
5、进入工作空间编译包
cd ~/catkin_ws
catkin_make --pkg chapter10_tutorials三、将ROS和PCL结合
1、若编译成功,新窗口打开ros
roscore
2.打开新窗口再次运行第一步的代码打开激光雷达
source ../../devel/setup.sh
roslaunch livox_ros_driver2 rviz_HAP.launch3.再打开个新窗口运行pcl_write.cpp
roscd chapter10_tutorials && rosrun chapter10_tutorials pcl_write4.可视化
rviz
注意:若打开后没有雷达返回的数据,则将左栏的设置为第一步的信息。











 ❀ 02. 对不同运营商IP网段访问进行分流 ❀ FortiGate 防火墙)







