前言:本文没有太多公式推理,只有一些简单的公式,以及公式和代码的对应关系。本文仅做个人学习笔记,如有理解错误的地方,请指出。
本文包含stable diffusion入门文献和不同版本的代码。
文献资源
- 本文学习的代码;
- 相关文献:
- Denoising Diffusion Probabilistic Models : DDPM,这个是必看的,推推公式
- Denoising Diffusion Implicit Models :DDIM,对 DDPM 的改进
- Pseudo Numerical Methods for Diffusion Models on Manifolds :PNMD/PLMS,对 DDPM 的改进
- High-Resolution Image Synthesis with Latent Diffusion Models :Latent-Diffusion,必看
- Neural Discrete Representation Learning : VQVAE,简单翻了翻,示意图非常形象,很容易了解其做法
代码资源
- stable diffusion v1.1-v1.4, https://github.com/CompVis/stable-diffusion
- stable diffusion v1.5,https://github.com/runwayml/stable-diffusion
- stable diffusion v2,https://github.com/Stability-AI/stablediffusion
- stable diffusion XL,https://github.com/Stability-AI/generative-models
前向过程(训练)
- 输入一张图片+随机噪声,训练unet,网络预测图片加上的噪声
反向过程(推理)
- 给个随机噪声,不断迭代去噪,输出一张图片
总体流程
- 输入的prompt经过clip encoder编码成(3+3,77,768)特征,正负prompt各3个,默认negative prompt为空‘’,解码时正的和负的latent图片用公式计算一下才是最终结果;time step通过linear层得到(3+3,1280)特征;把prompt和time ebedding和随机生成的图片放入unet,得到的就是我们要的图片。
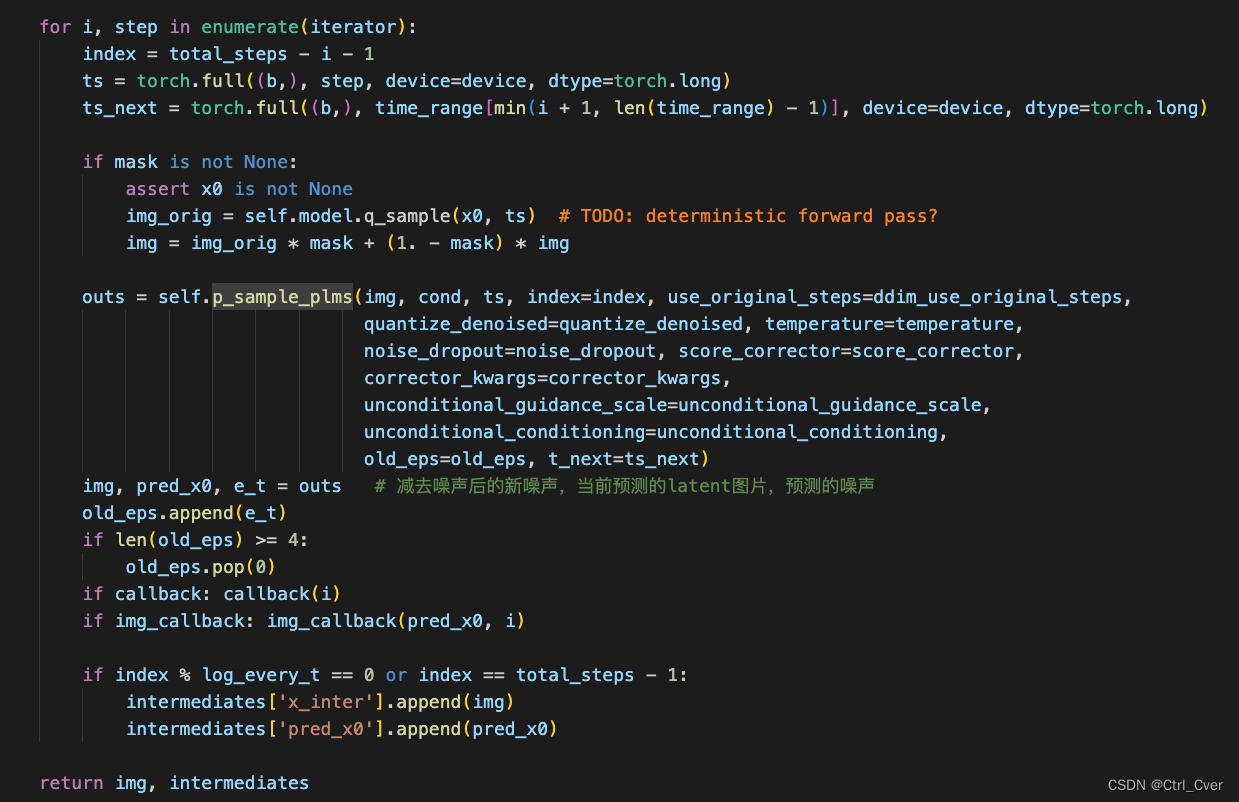
采样流程 text2img
- 该函数在PLMSSampler中,输入x(噪声,(3,4,64,64))-----c(输入的prompt,(3,77,768)----t (输入的time step,第几次去噪(3,)。把这三个东西输入unet,得到预测的噪声e_t。
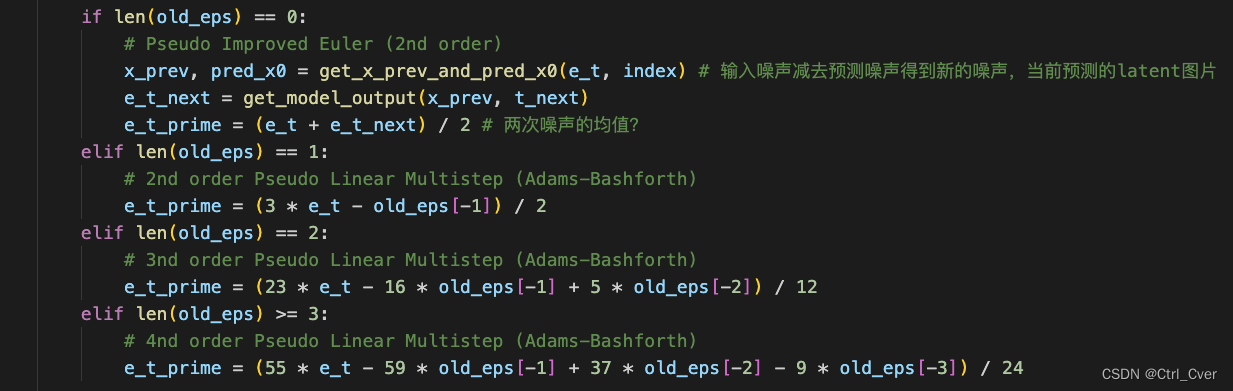
def p_sample_plms(self, x, c, t, index, repeat_noise=False, use_original_steps=False, quantize_denoised=False,temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,unconditional_guidance_scale=1., unconditional_conditioning=None, old_eps=None, t_next=None):b, *_, device = *x.shape, x.devicedef get_model_output(x, t):if unconditional_conditioning is None or unconditional_guidance_scale == 1.:e_t = self.model.apply_model(x, t, c)else:x_in = torch.cat([x] * 2)t_in = torch.cat([t] * 2)c_in = torch.cat([unconditional_conditioning, c]) # 积极消极的prompt,解码时按照公式减去消极prompt的图像e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in).chunk(2)e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)if score_corrector is not None:assert self.model.parameterization == "eps"e_t = score_corrector.modify_score(self.model, e_t, x, t, c, **corrector_kwargs)return e_talphas = self.model.alphas_cumprod if use_original_steps else self.ddim_alphasalphas_prev = self.model.alphas_cumprod_prev if use_original_steps else self.ddim_alphas_prevsqrt_one_minus_alphas = self.model.sqrt_one_minus_alphas_cumprod if use_original_steps else self.ddim_sqrt_one_minus_alphassigmas = self.model.ddim_sigmas_for_original_num_steps if use_original_steps else self.ddim_sigmasdef get_x_prev_and_pred_x0(e_t, index):# select parameters corresponding to the currently considered timestepa_t = torch.full((b, 1, 1, 1), alphas[index], device=device)a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)# current prediction for x_0pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()if quantize_denoised:pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)# direction pointing to x_tdir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_tnoise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperatureif noise_dropout > 0.:noise = torch.nn.functional.dropout(noise, p=noise_dropout)x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noisereturn x_prev, pred_x0e_t = get_model_output(x, t) # 模型预测的噪声if len(old_eps) == 0:# Pseudo Improved Euler (2nd order)x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t, index) # 输入噪声减去预测噪声得到新的噪声,当前预测的latent图片e_t_next = get_model_output(x_prev, t_next)e_t_prime = (e_t + e_t_next) / 2 # 两次噪声的均值?elif len(old_eps) == 1:# 2nd order Pseudo Linear Multistep (Adams-Bashforth)e_t_prime = (3 * e_t - old_eps[-1]) / 2elif len(old_eps) == 2:# 3nd order Pseudo Linear Multistep (Adams-Bashforth)e_t_prime = (23 * e_t - 16 * old_eps[-1] + 5 * old_eps[-2]) / 12elif len(old_eps) >= 3:# 4nd order Pseudo Linear Multistep (Adams-Bashforth)e_t_prime = (55 * e_t - 59 * old_eps[-1] + 37 * old_eps[-2] - 9 * old_eps[-3]) / 24x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t_prime, index)return x_prev, pred_x0, e_t
- 接下来看公式:
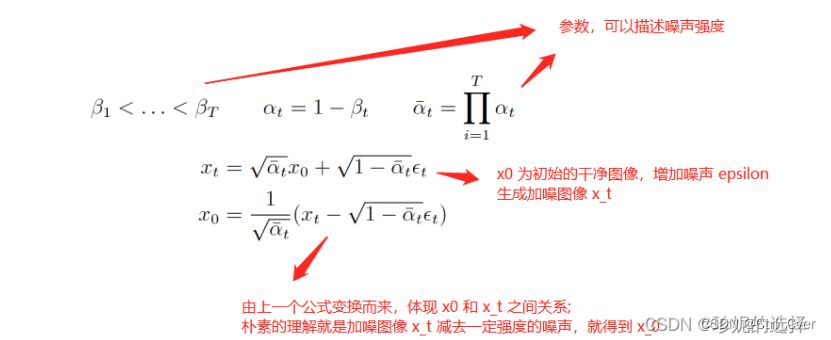
- 网络得到e_t后,进入到get_x_prev_and_pred_x0函数,可以看到
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()就是上述公式,也就是说网络的预测结果通过公式计算,我们可以得到预测的pred_x0原始图片和前一刻的噪声图像x_prev。
def get_x_prev_and_pred_x0(e_t, index):# select parameters corresponding to the currently considered timestepa_t = torch.full((b, 1, 1, 1), alphas[index], device=device)a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)# current prediction for x_0pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()if quantize_denoised:pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)# direction pointing to x_tdir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_tnoise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperatureif noise_dropout > 0.:noise = torch.nn.functional.dropout(noise, p=noise_dropout)x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noisereturn x_prev, pred_x0
-
前一刻的噪声图像的推理公式如图:


-
得到了上一刻的噪声图片x_prev后(也就是函数返回的img),继续迭代,最终生成需要的图片。
额外说明
这部分代码应该就是PLMS加速采样用的,论文中有公式推理
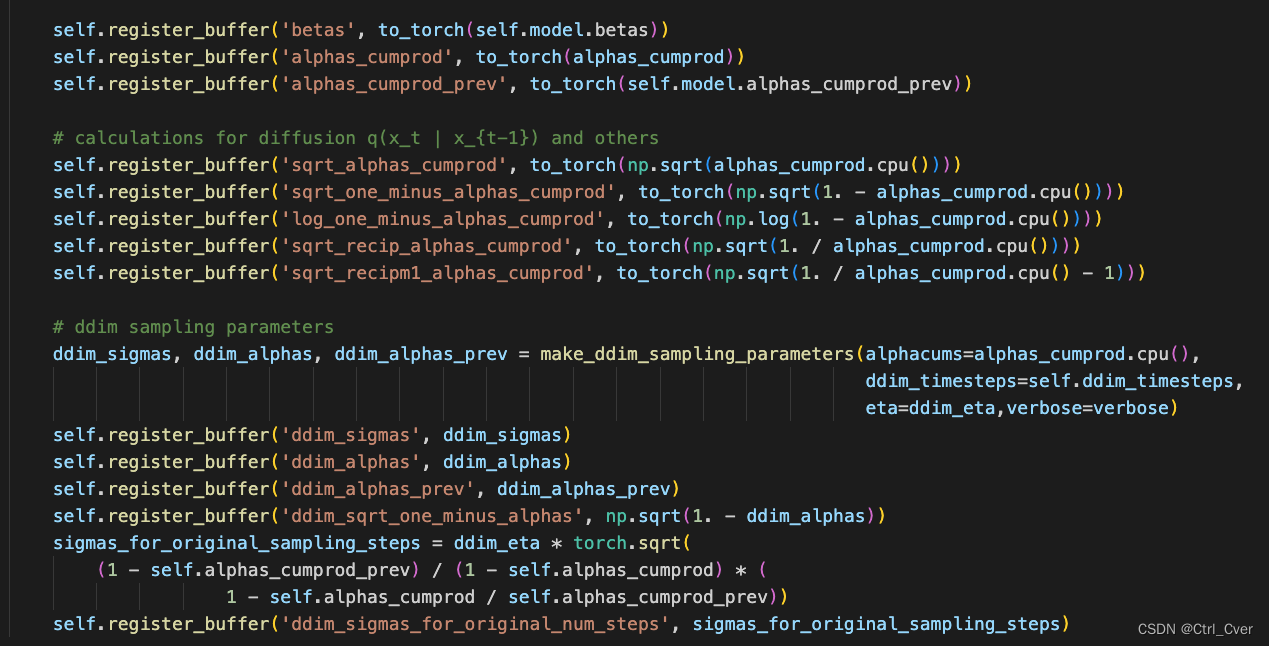
另外,还有一些参数是训练时候保存的,betas逐渐增大,用来控制噪声的强度。变量名解析 log_one_minus_alphas_cumprod其实就是log(1-alpha(右下角t)(头上直线)),没有带prev的都是当前时刻t,带prev的是前一时刻t-1。
参考文献:
https://blog.csdn.net/Eric_1993/article/details/129600524?spm=1001.2014.3001.5502
https://zhuanlan.zhihu.com/p/630354327
)



)


)


)








