1,任务的挂起与恢复的API函数(熟悉)
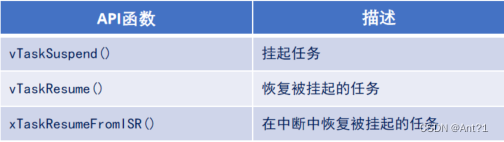
任务挂起和恢复的区别
挂起还能被恢复,删除任务后无法恢复。
带FromISR后缀是在中断函数中专用的API函数
1.1任务挂起函数介绍
void vTaskSuspend(TaskHandle_t xTaskToSuspend)
xTaskToSuspend 待挂起任务的任务句柄
此函数用于挂起任务,使用时需将宏 INCLUDE_vTaskSuspend 配置为 1。
无论优先级如何,被挂起的任务都将不再被执行,直到任务被恢复 。
注意:当传入的参数为NULL,则代表挂起任务自身(当前正在运行的任务)
1.2任务恢复函数介绍(任务中恢复)
void vTaskResume(TaskHandle_t xTaskToResume)
xTaskToResume 待恢复任务的任务句柄
使用该函数注意宏:INCLUDE_vTaskSuspend必须定义为 1
注意:任务无论被 vTaskSuspend() 挂起多少次,只需在任务中调用 vTakResume() 恢复一次,就可以继续运行。且被恢复的任务会进入就绪态!
1.3任务恢复函数介绍(中断中恢复)
BaseType_t xTaskResumeFromISR(TaskHandle_t xTaskToResume)
xTaskToResume 待恢复任务的任务句柄
xTaskResumeFromISR返回值描述如下:
pdTRUE 任务恢复后需要进行任务切换(被恢复任务优先级>当前任务优先级)
pdFALSE 任务恢复后不需要进行任务切换
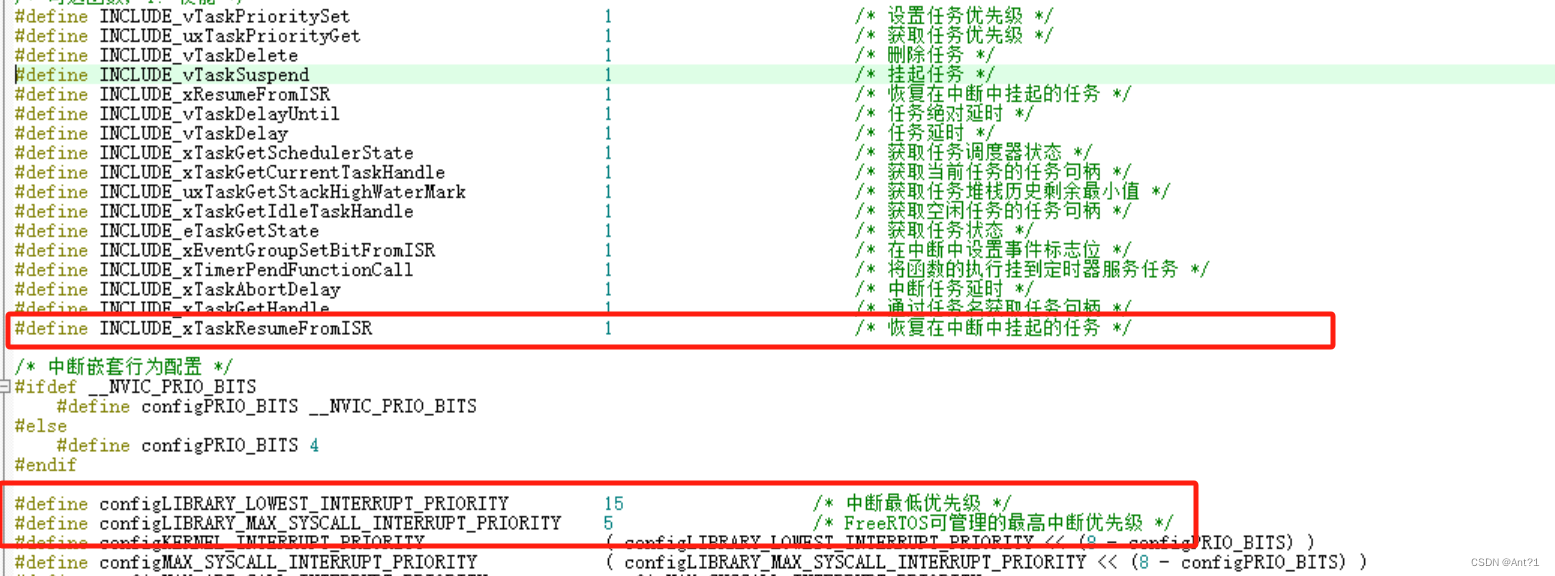
使用该函数注意宏:INCLUDE_vTaskSuspend 和 INCLUDE_xTaskResumeFromISR 必须定义为 1
注意:中断服务程序中要调用freeRTOS的API函数则中断优先级不能高于FreeRTOS所管理的最高优先级
2实验
2.1实验目的
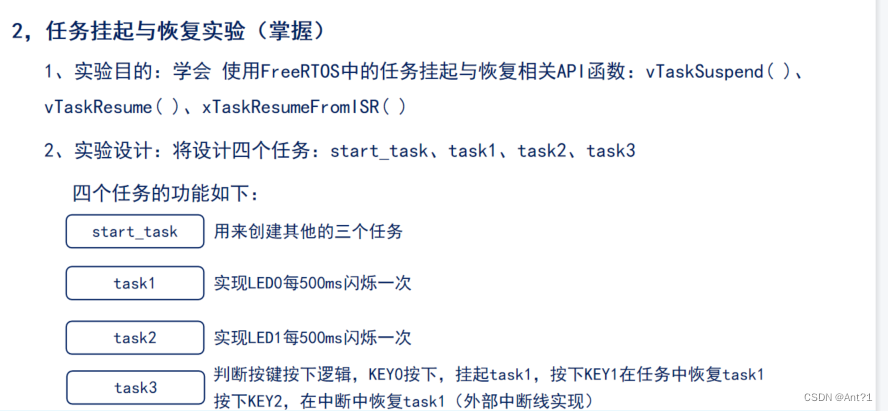
2.2实验实现过程
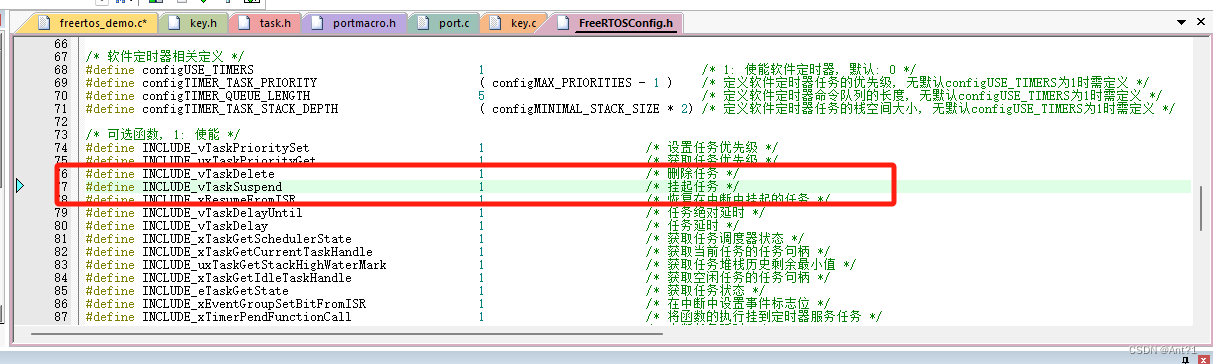
首先打开宏
设置NVIC分组为4
/******************************************************************************************************* @file freertos.c* @author 正点原子团队(ALIENTEK)* @version V1.4* @date 2022-01-04* @brief FreeRTOS 移植实验* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司***************************************************************************************************** @attention** 实验平台:正点原子 F407电机开发板* 在线视频:www.yuanzige.com* 技术论坛:www.openedv.com* 公司网址:www.alientek.com* 购买地址:openedv.taobao.com******************************************************************************************************/#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"/******************************************************************************************************/
/*FreeRTOS配置*//* START_TASK 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );/******************************************************************************************************//*** @brief FreeRTOS例程入口函数* @param 无* @retval 无*/
void freertos_demo(void)
{ xTaskCreate((TaskFunction_t) start_task,(char *) "start_task",(configSTACK_DEPTH_TYPE) START_TASK_STACK_SIZE,(void *) NULL,(UBaseType_t) START_TASK_PRIO,(TaskHandle_t *)&start_task_handler);//开启任务调度vTaskStartScheduler();}
void start_task( void * pvParameters )
{taskENTER_CRITICAL(); /* 进入临界区 任何任务和中断都不能打断当前程序运行*/xTaskCreate((TaskFunction_t) task1,(char *) "task1",(configSTACK_DEPTH_TYPE) TASK1_STACK_SIZE,(void *) NULL,(UBaseType_t) TASK1_PRIO,(TaskHandle_t *)&task1_handler );xTaskCreate((TaskFunction_t) task2,(char *) "task2",(configSTACK_DEPTH_TYPE) TASK2_STACK_SIZE,(void *) NULL,(UBaseType_t) TASK2_PRIO,(TaskHandle_t *)&task2_handler ); xTaskCreate((TaskFunction_t) task3,(char *) "task3",(configSTACK_DEPTH_TYPE) TASK3_STACK_SIZE,(void *) NULL,(UBaseType_t) TASK3_PRIO,(TaskHandle_t *)&task3_handler );vTaskDelete(NULL);//删除当前任务也就是开始任务taskEXIT_CRITICAL();}void task1( void * pvParameters )
{uint32_t task1_num=0;while(1){task1_num++;printf("task1_num= %d \n",task1_num);LED0_TOGGLE();vTaskDelay(500);}
}void task2( void * pvParameters )
{uint32_t task2_num=0;while(1){task2_num++;printf("task2_num= %d \n",task2_num);LED1_TOGGLE();vTaskDelay(500);}
}void task3( void * pvParameters )
{//静态变量在程序运行期间只会被初始化一次,即使经过多次函数调用或程序执行。因此,在程序下次运行时,静态变量的值将保持上一次程序运行结束时的值,并不会重新赋初值。//如果未显式指定初始值,则静态变量将根据其类型自动初始化为默认值。例如,静态变量 uint8_t key_up 初始值为 0。static uint8_t key =0;while(1){key = key_scan(0);if(key==KEY0_PRES){/*挂起任务1*/vTaskSuspend(task1_handler);}else if(key==KEY1_PRES){/*恢复任务1*/vTaskResume(task1_handler);}vTaskDelay(10);}
}外部中断触发函数
void KEY2_INT_IRQHandler(void)
{ HAL_GPIO_EXTI_IRQHandler(KEY2_INT_GPIO_PIN); /* 调用中断处理公用函数 清除KEY2所在中断线 的中断标志位,中断下半部在HAL_GPIO_EXTI_Callback执行 */__HAL_GPIO_EXTI_CLEAR_IT(KEY2_INT_GPIO_PIN); /* HAL库默认先清中断再处理回调,退出时再清一次中断,避免按键抖动误触发 */
}/*** @brief 中断服务程序中需要做的事情* 在HAL库中所有的外部中断服务函数都会调用此函数* @param GPIO_Pin:中断引脚号* @retval 无*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{delay_ms(20); /* 消抖 */BaseType_t xYieldRequired;if (KEY2 == 0){xYieldRequired = xTaskResumeFromISR(task1_handler);}if(xYieldRequired==pdTRUE){portYIELD_FROM_ISR(xYieldRequired );}}/*** @brief 外部中断初始化程序* @param 无* @retval 无*/
void extix_init(void)
{GPIO_InitTypeDef gpio_init_struct;key_init(); gpio_init_struct.Pin = KEY2_INT_GPIO_PIN;gpio_init_struct.Mode = GPIO_MODE_IT_FALLING; /* 下降沿触发 */gpio_init_struct.Pull = GPIO_PULLUP;HAL_GPIO_Init(KEY2_INT_GPIO_PORT, &gpio_init_struct); /* KEY2配置为下降沿触发中断 */HAL_NVIC_SetPriority(KEY2_INT_IRQn, 6,0); /* 抢占2,子优先级2 */HAL_NVIC_EnableIRQ(KEY2_INT_IRQn); /* 使能中断线2 */}注意NVIC配置HAL_NVIC_SetPriority(KEY2_INT_IRQn, 6,0);优先级要在5-15之间
官方参考链接
https://www.freertos.org/zh-cn-cmn-s/taskresumefromisr.html



进行抓包的配置)















