
1.1 毫米波雷达是利用毫米波电磁波波束工作的雷达,车载是首要应用场景
毫米波雷达是一种以波长位于1-10mm、频率在30-300GHz的电磁波作为放射波的雷达传感器。
毫米波雷达利用毫米波波束进行工作。①检测障碍物时: 直接通过有无回波确认; ②测距时: 通过波束的飞行时间(TOF)计算距离; ③测速时: 利用多普勒效应或通过跟踪障碍物位置并进行微分得到速度; ④测方位时: 通过有向天线或天线阵列与阵列算法将波束收窄进行方位测量。
毫米波雷达工作流程涉及信号发射、接收以及解读: 由芯片控制天线发射一定频率的毫米波电磁波,电磁波碰到障碍物后反射回来并被天线接收,数字信号处理模块对接收到的电磁波信号进行处理,通过算法计算出障碍物的距离、速度和方向等信息。

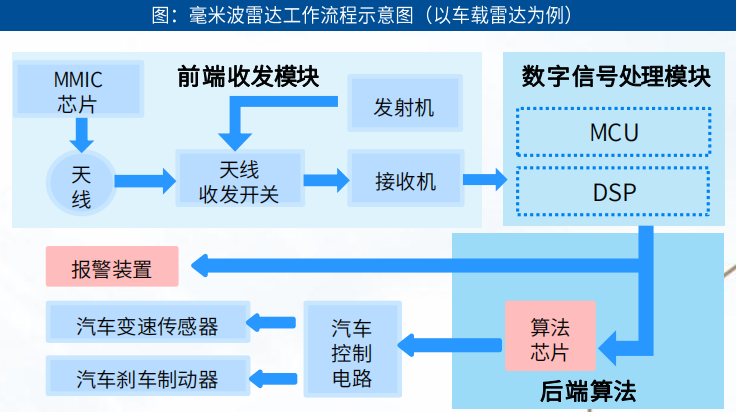
毫米波雷达主要组件为:射频芯片(MMIC)、微带贴片天线、数字信号处理器(DSP/FPGA)、PCB基板及控制电路等。
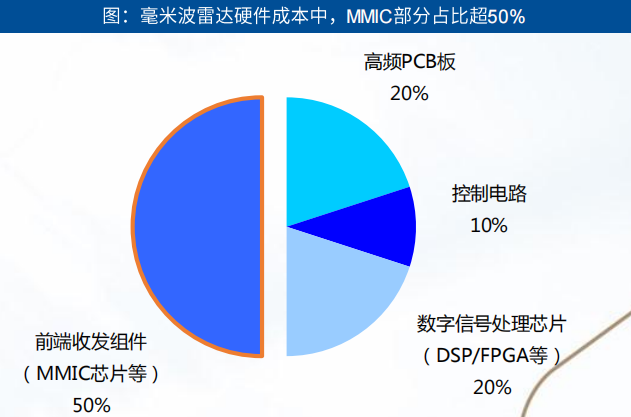
“MMIC芯片(单片微波集成电路)”是毫米波雷达硬件成本的主要组成部分。
“微带贴片天线”将高频PCB集成在普通PCB上,利用高频电路向外发射并接收毫米波(调频连续波);
“MMIC芯片”集成如低噪声放大器(LNA)、功率放大器、混频器、收发系统等,实现最核心的毫米波信号调制、发射、接收以及回波信号解调功能,在整体硬件成本中的占比为50%,是毫米波雷达的“心脏”。

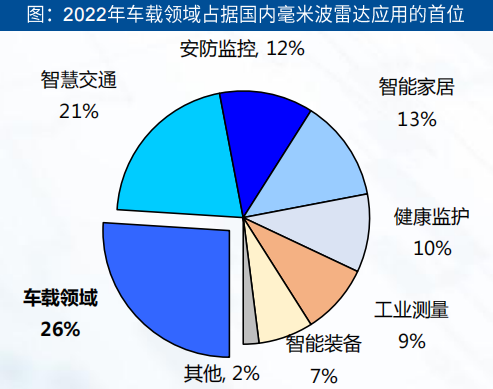
车载领域为当前毫米波雷达最大的应用场景,主要用于辅助驾驶和座舱监控。 2022年中国毫米波雷达市场中,车载毫米波雷达占比达26%。
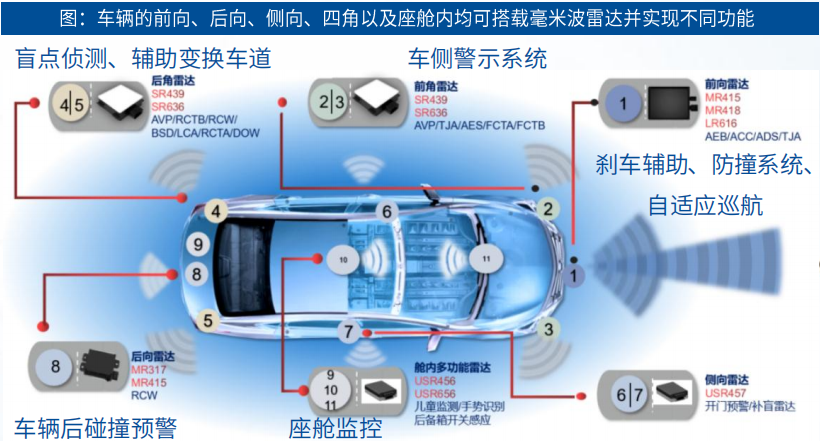
作为辅助驾驶传感器的重要组成部分,毫米波雷达已大量应用于辅助驾驶系统中作为前向雷达。 而随着毫米波雷达成本不断降低、性能的不断提升,毫米波雷达搭载位置正从传统的前向向四角、后向、侧向等位置延展,以实现盲区检测、自动泊车、后碰撞预警等更高阶、更丰富的辅助驾驶功能;
在近年座舱智能化的风潮下, 毫米波雷达正加速应用于座舱内儿童遗留检测、手势识别等领域。
除车载领域外,毫米波雷达亦广泛应用于智慧交通、安防监控以及智能家居等场景。 如在智能家居场景中,毫米波雷达相较摄像头在满足智能控制功能基础上能提供更好的私密性。在健康监护中,毫米波雷达能够以非接触、无感的形式检测心跳。
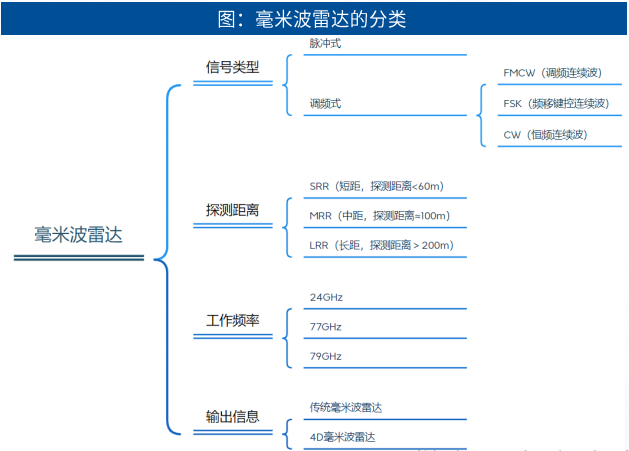
毫米波雷达可按照信号类型、探测距离、工作频率等角度进行分类:
调频式连续波技术是毫米波雷达的主要技术路线。 该技术的优势在于测量距离远、精度高、在性能相同的条件下成本更低;
不同探测距离的雷达上车搭载位置不同。 一般前向雷达为LRR类型,搭载量1-2颗,角雷达以及座舱内雷达为SRR或MRR类型;
不同工作频率毫米波雷达性能不同。 毫米波雷达主要工作频率为24GHz、60GHz、77GHz、79GHz,低频率雷达成本较低、高频率雷达性能更佳。
77-79GHz毫米波雷达将成为车载主流类型 。 77GHz收发天线长度与阵列间隔均为24GHz的1/3,体积约为1/9,产品体积较小且识别精度更高。政策层面看,24GHz频段2022年起已在欧洲、美国停止使用,我国工业和信息化部已在《汽车雷达无线电管理暂行规定》中明确汽车雷达使用频率为76-79GHz。

1.2 车载毫米波雷达与其他传感器良好互补,是感知层重要组成部分
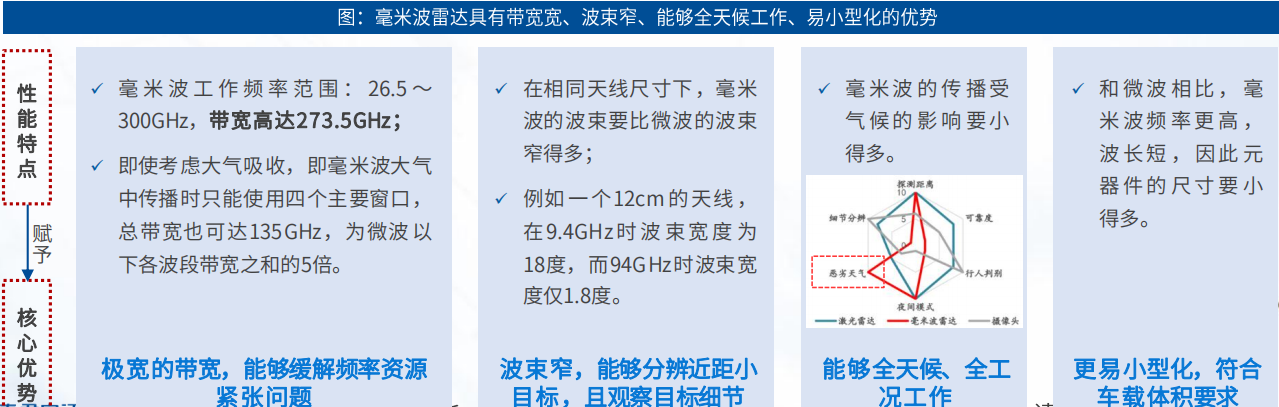
第一,毫米波雷达能够全天候工作,提升智能驾驶稳定性: 相较于摄像头和激光雷达受气候影响较大,容易受雨雪雾等不良天气影响。毫米波由于具有优秀的穿透性使毫米波雷达是主流车载传感器中唯一可在恶劣天气下工作的,能够确保在极端环境下车载感知系统持续工作。
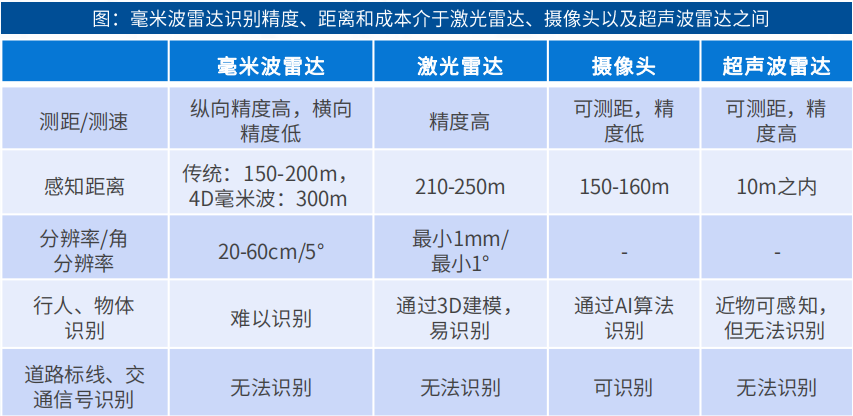
第二,毫米波雷达具有较远的探测距离: 超声波雷达使用超声波信号并根据该信号发出与返回的时间差计算与障碍物之间的距离,虽其精度可以达到毫米级且成本低廉,但探测距离仅为15-500cm,因而仅用于短距离测量。传统毫米波雷达探测距离可达150-200m,新一代4D毫米波雷达如安波福FLR7的最大测距普遍达到了300m级别,能较好地满足远处障碍物的探测。
第三,毫米波雷达更易小型化,符合车载对体积的严苛要求: 和微波相比,毫米波频率更高,波长短,因此元器件尺寸要小得多,上车装配灵活度大。
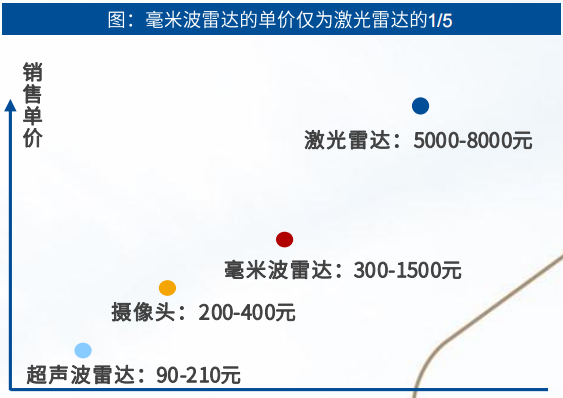
第四,在满足全天候工况、较长的探测距离基础上,相较摄像头、超声波雷达与激光雷达,毫米波雷达提供了一个兼具感知性能以及上车成本的性价比 选择:
相较成本比毫米波雷达低的超声波雷达和摄像头,毫米波雷达探测距离更长、受外界因素影响较小,能克服后两者的性能短板;
相较感知精度更高的激光雷达,毫米波雷达成本具有较大优势,且能全天候工作并实现相近的探测距离,在新兴4D毫米波雷达成熟之后,4D毫米波雷达亦能一定程度上实现成像功能,有望在中低端场景成为激光雷达的平替。
毫米波雷达识别精度、识别距离及单价均介于三者之间,是其他车载传感器的良好互补,共同组成智能汽车的感知系统。
1.3 “芯片+天线排列+算法”为毫米波雷达的研发门槛
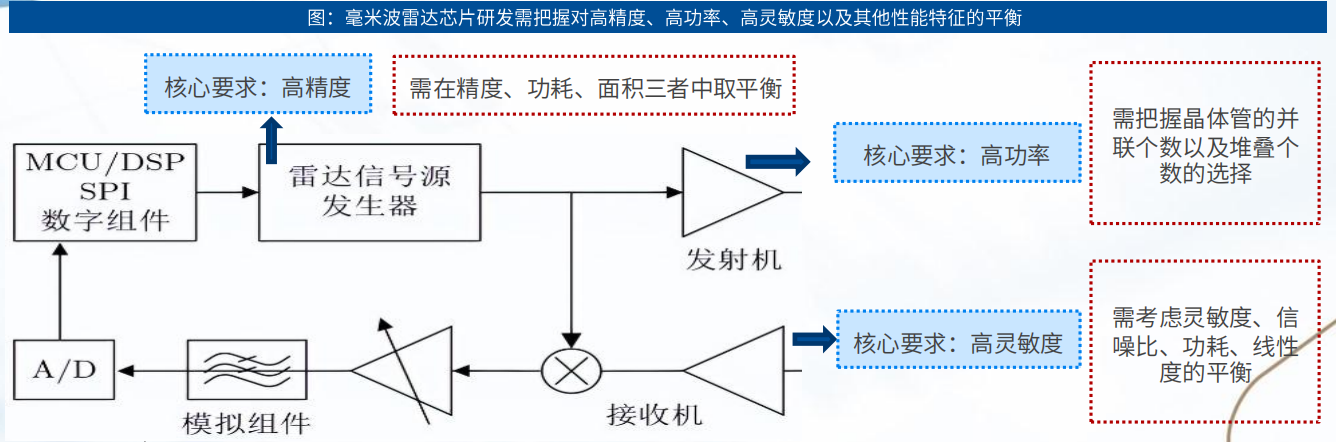
毫米波雷达芯片需要做到高精度、高功率、高灵敏度,研发的难点涉及毫米波放大器抗阻匹配、输出功率提高、相控阵等技术。
毫米波放大器抗阻匹配: 为了实现雷达信号源的高精度,需要提高毫米波放大器的工作带宽,但同时将会带来芯片的功耗上升、面积增大等问题。
输出功率的提高: 提高宽带发射机的功率一般采用晶体管堆叠或多路功率合成技术,核心难点在于如何选择晶体管的并联个数以及堆叠个数。
相控阵技术: 相控阵技术的采用可实现宽带接收机的高灵敏度,该技术主要关注毫米波移相器的设计,设计需考虑移相范围、移相精度和误差等问题,同时兼顾对相控阵芯片的信噪比、功耗、线性度的影响。
毫米波雷达芯片产品的设计同时需要考虑产品体积、功耗以及天线间相互干扰问题。
芯片体积缩小能够使整机前装上车更加便利、装载场景更加丰富,将推动毫米波雷达需求落地;
芯片实现低功耗运行有助于提高电池寿命、解决运行发热等问题,提升毫米波雷达的性能,提高系统运行的稳定程度;
天线间相互干扰会导致信号误差和失真,从而影响雷达系统的探测和成像精度,考虑该问题是为了确保系统运行的准确与稳定。
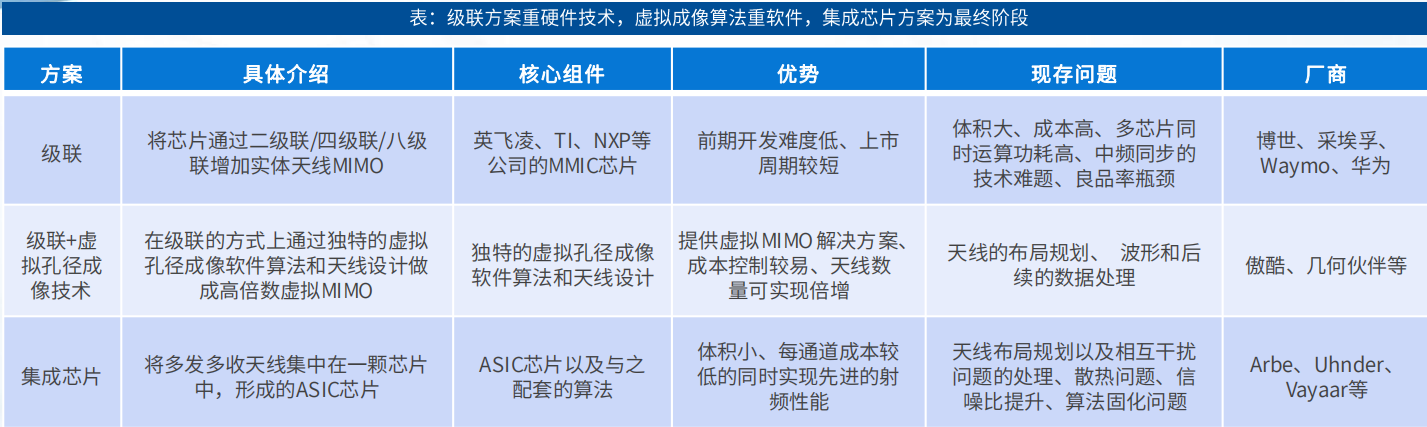
4D毫米波雷达的问世使芯片需通过增加虚拟通道数(MIMO)来提高分辨率,主流方法为级联、级联+虚拟孔径成像算法以及集成芯片。
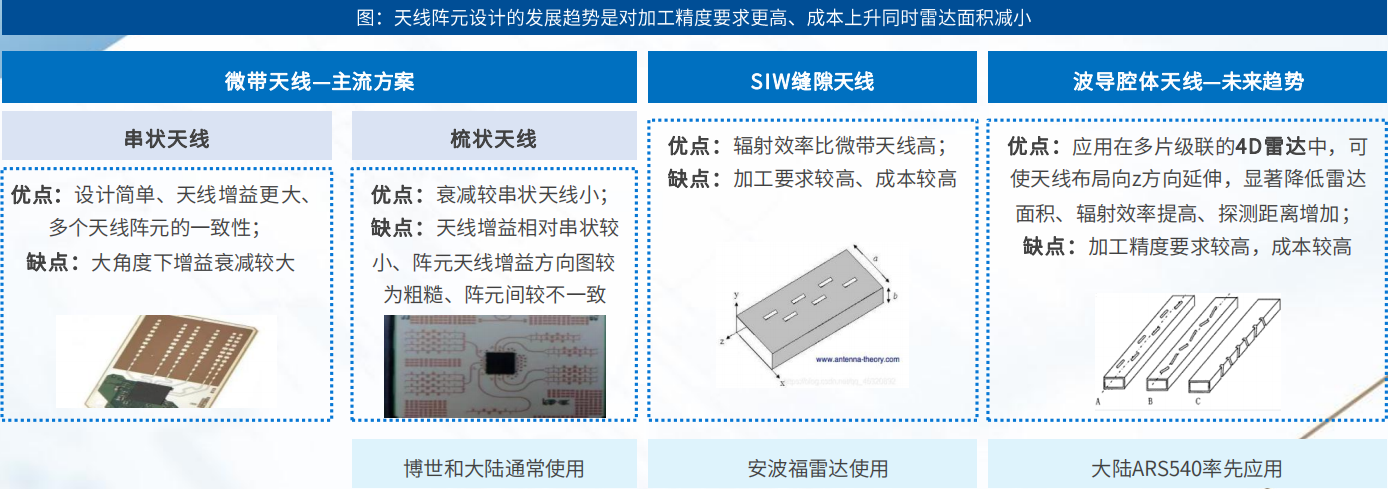
较短的天线长度使得用多根天线构成阵列以实现窄波束的方式成为主流。 为了实现高发射及接受转换效率,天线长度通常为电磁波波长的1/4,由于毫米波雷达的波长在1-10mm之间,对应的天线长度较短,可以使用多根天线构成阵列天线。
天线阵列的设计需满足低成本的批量生产要求,便于安装在车头部,同时使用集成工艺进而不对汽车外观造成影响。
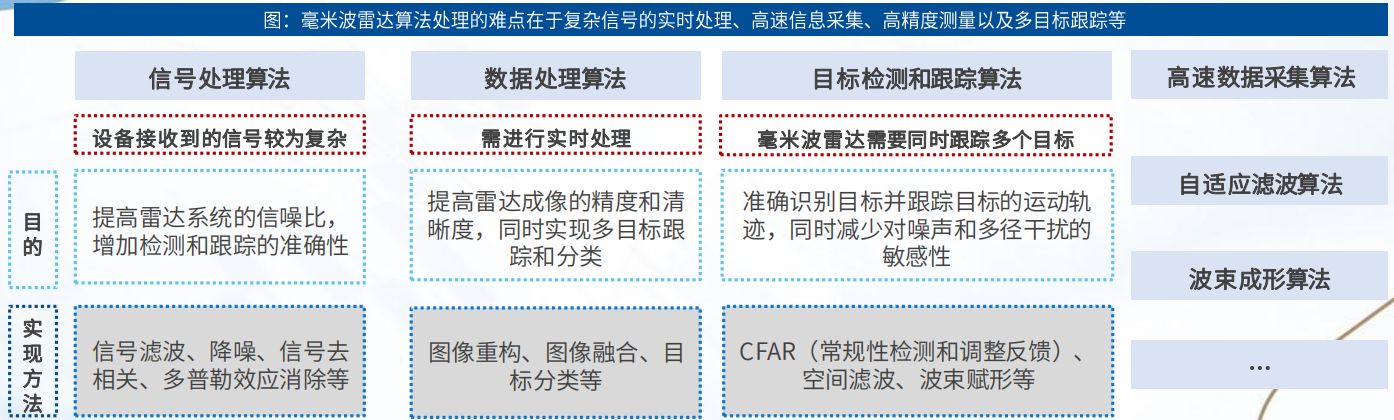
毫米波雷达的算法主要包括信号处理和数据处理两大方面,核心处理步骤涉及滤波、去除干扰、提取目标信息等,算法设计对成像结果的准确性影响加 大,决定整体系统的性能。
信号处理算法在DSP上完成,核心是将ADC采样获得的复杂原始数据转换成点云数据;
数据处理算法在MCU上完成,核心是对点云数据处理的过程,包括追踪、目标分类、数据融合等环节以及更上层的 ACC/AEB/BSD 等应用算法,以实现高精度的识别。
4D毫米波雷达的点云图像密度更高,输出数据和激光雷达类似,如何剔除不必要的点云信息,同时挑选出需要用的的点云再将其应用至学习过程中是 4D毫米波雷达算法的重点,需引入深度学习。 4D毫米波雷达产生的点云数据较多,在雷达设计之外需要厂商在AI算法和目标识别算法上具备较强研发能力,以满足与智能驾驶融合需要的目标识别、目标分类、场景识别要求并降低漏检率、误报率。
将较传统毫米波雷达,4D毫米波雷达的软件算法设计重难点在于发射信号以及后续点云信息的处理,对厂商要求较高。 若国产毫米波雷达厂商能在够提供4D毫米波雷达相关硬件的同时输出软件方案,将成为其弯道超车的重要助推力。

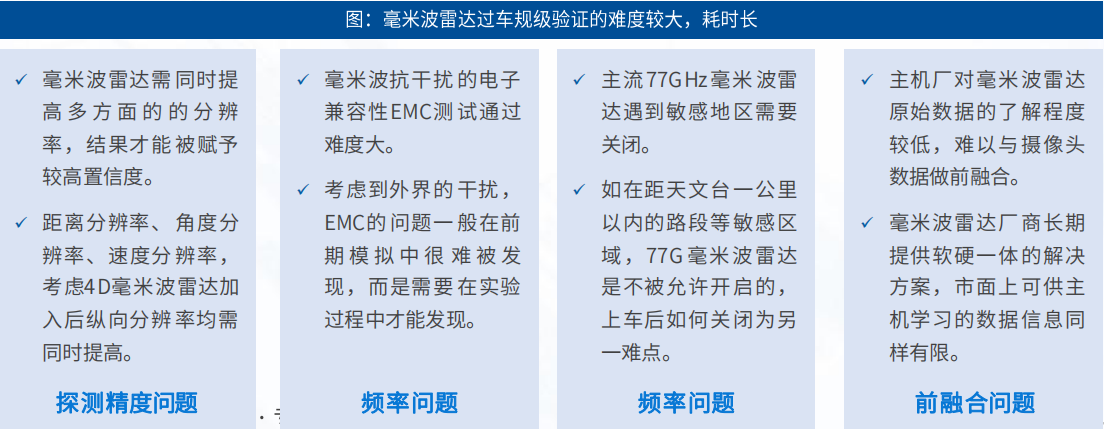
1.4 过车规验证与稳定量产上车为毫米波雷达产业的业务能力门槛
毫米波雷达上车需在探测精度问题,频率、发射功率等层面合相关车规验证标准。 车规级芯片在设计、开发、生产和测试阶段要求更高,开发周期更长。车规级元件对环境要求、抗振动冲击、可靠性和一致性等方面要求严格,如毫米波抗干扰的电子兼容性EMC测试通过难度大。要求雷达及芯片厂商与Tier-1或主机厂紧密配合,对厂商下游需求理解、下游资源关系有较高要求。
在对接与后续供货阶段,下游客户对雷达及芯片厂商供应链能力、持续供货能力和服务能力亦有要求。 主机厂对产品供应稳定性要求较高,同时由于国内相关产业起步较晚、积累不足,下游客户在需求对接阶段往往需要雷达及芯片厂商提供从硬件设计参考、完整的信号处理算法软件包、配备专业的应用到现场支持等全面的支持服务,因而对厂商全面服务能力具有较高要求。
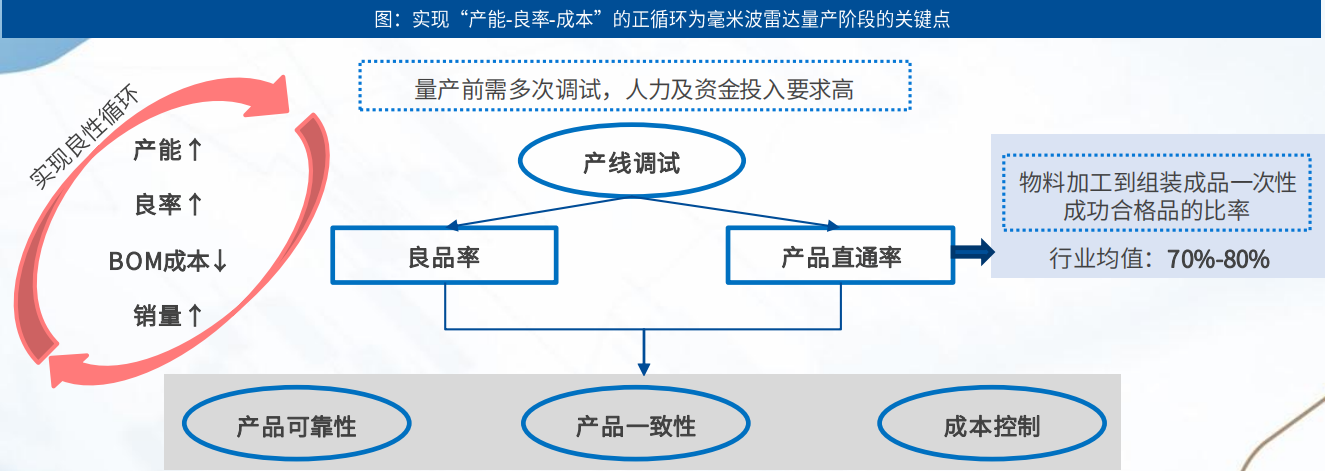
量产阶段:考验厂商的专业性与资源投入。 当前车载毫米波雷达芯片生产结合大量半导体制造工艺、先进封装工艺,需要厂商在量产过程中投入大量、专业的人力、资源与Know-How积累进入生产环节。能否让毫米波雷达产品稳定满足下游应用需要的适用性、可靠性、一致性并真正在成本控制下实现稳定落地量产是优秀毫米波雷达及芯片厂商划分的另一个重要标准。
![[递归] 指数型枚举](http://pic.xiahunao.cn/[递归] 指数型枚举)








)



linux使用docker容器运行mysql)
)

)


