1、介绍
此软件包实现了变分形状近似(VSA)方法,通过更简单的表面三角形网格来近似输入表面网格。该算法的输入必须是:
三角形分割;组合2流形
输出是一个三角形汤,可以构建成多边形曲面网格。
给定一个输入曲面三角网格,VSA利用离散聚类算法通过一组称为代理的局部简单形状对其进行近似。每个簇表示为输入网格的一组连接的三角形,输出网格是通过生成一个近似簇的曲面三角网格来构造的。近似误差是单边的,在簇与其相关代理之间定义。两个误差度量(L2和L1)用于评估簇的近似误差。
两个错误度量( L22, L2,1) 用于平面代理的算法是通过类CGAL::Surface_mesh_approximation::L2_metric_plane_proxy和CGAL::Surface_mesh_approximation::L21_metric_plane_proxy提供的,该算法设计对于其他用户定义的度量是通用的。当前的代理是平面或向量,但是该算法设计对于未来非平面代理的扩展是通用的。
默认的L2,1在计算和视觉感知方面,建议使用度量。
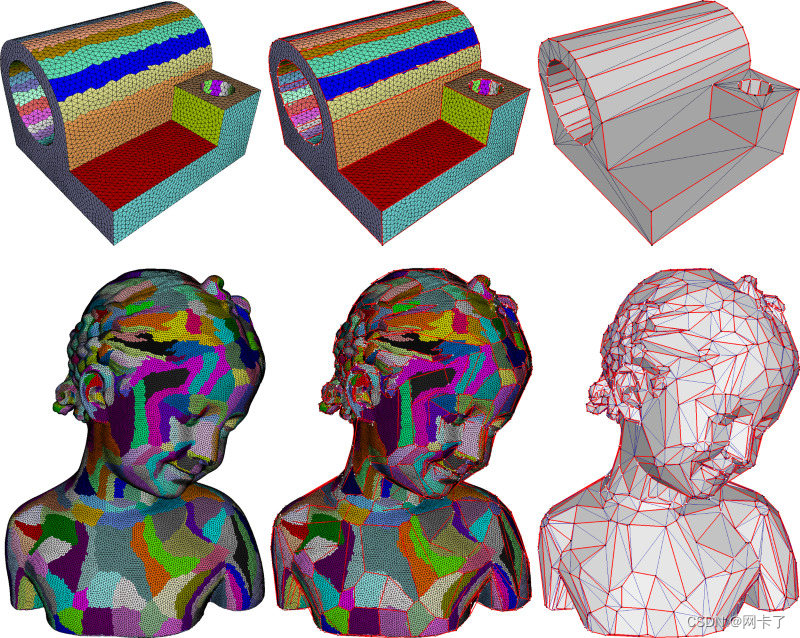
两个L2,1模型的变分形状近似;误差度量和平面代理。从左到右:输入曲面三角形网格、锚点顶点和边以及输出三角形网格的分区。通过输入三角形的离散聚类来优化分区,从而最小化从聚类到平面代理(未示出)的近似误差。
该软件包通过免费函数CGAL::Surface_mesh_approximation::approxy_triangle_mesh()提供近似和网格构建功能,该函数运行该算法的全自动版本:
还为高级用户提供了一个类接口,其中一系列顺从的操作符在集群和自定义过程中提供了交互功能,包括错误和代理。
2、整体
该软件包包含3个主要组件:近似算法、柔顺算子和网格划分,如图所示。
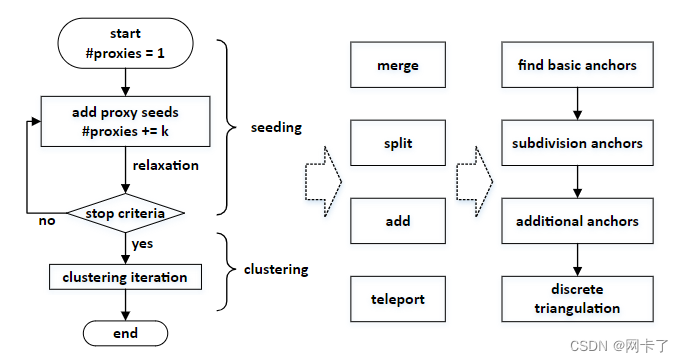
从左到右是近似包的三个组成部分:近似算法(左)、可选的服从运算(中)和网格划分(右)。
2.1、近似
上图的左侧部分描述了近似算法的工作流程。
聚类迭代
下图描述了具有平面代理和L2,1的平面球体模型上的几个Lloyd聚类迭代。我们绘制了每次迭代的拟合误差。经过8次迭代后,误差几乎没有变化。基于这一观察结果,我们认为,如果当前迭代和先前迭代之间的误差变化低于用户指定的阈值(由两条绿色虚线表示),则聚类收敛。
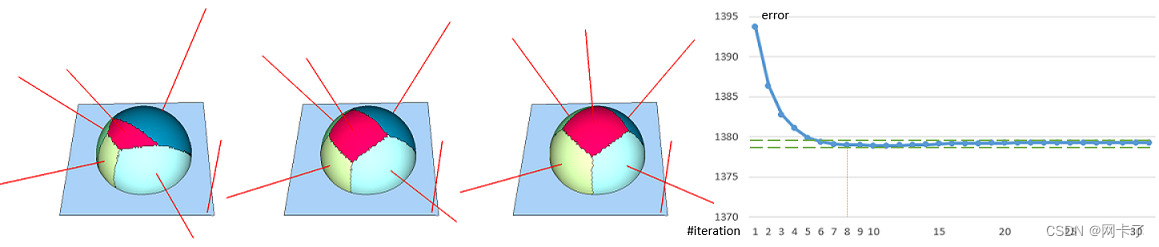
具有平面代理和L2,1的平面球体模型的离散Lloyd迭代度量:(左)6个代理的随机种子;(中心)一次迭代后;(右)经过8次迭代后,区域稳定下来。红线表示在种子面绘制的代理法线。
种子
每个代理始终与输入曲面网格中的种子三角形面相关联。虽然从几何误差的角度来看,代理可以被视为中心(或最佳代表),但每个代理的种子被用作聚类过程中的起点。种子处理是指决定如何选择种子面的过程,新代理/分区可以从种子面初始化。
为了开始聚类迭代,我们需要一组初始代理。默认(分层)方法为每个连接的组件生成一个代理,以任意选择的面为种子。然后,它分批添加更多代理,以降低误差。在添加每一批代理后,它会执行几次内部聚类迭代,这在种子步骤中被称为松弛。
假设一个 n 维的聚类分区有误差的区域{Ek}k=1⋯n,我们希望添加m代理。我们提供3种不同的种子方法:
随机:种子面是在曲面上随机选取的,不包括当前的种子面。
增量式。每个新代理都从具有最大近似误差的区域的一个面初始化。该面本身被选为在其区域内实现最大误差的面。
等级制的面;种子面在当前的分区内被调度,其中每个区域都根据其拟合误差选择了一些代理进行细化:
计算总误差Etotal,则平均误差Eavg=Etotal/m(假设每个新代理共享相同的误差量)
排序错误 {Emin,⋯,Emax}
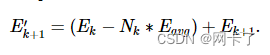
来自Emin到Emax,我们逐层扩散误差。更具体地说,代理的数量Nk添加到 kth 区域与其误差成正比

并且将剩余的错误添加到下一个代理错误,以保持总错误不变:
下图描述了不同的播种方法。
随机初始化随机选择一组输入三角形面作为代理种子。虽然它非常快,但随后的聚类过程可能会陷入糟糕的局部最小值,尤其是在区域被尖锐折痕包围的形状上(左特写)。
增量初始化在失真程度最高的区域逐个添加代理。因此,由于大量的交错弛豫迭代,它可能是缓慢的。
分层初始化(默认选择)在分层细化序列中重复加倍代理的数量,以生成拟合误差均匀分布的聚类区域。时间消耗通常介于前两者之间。统计和比较可参见性能一节。
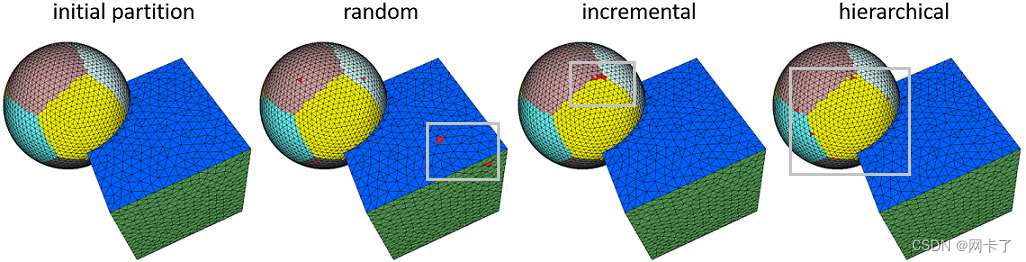
球体立方体模型上的不同播种方法。从左到右:初始分区(L2,1度量和20个代理),分别使用随机、增量和分层方法添加5个代理种子(红色面)。
停止标准
为了确定何时停止添加更多代理,我们可以指定近似几何形状所需的最大代理数量,或者相对于第一个分区的最小误差下降百分比。更具体地说,我们可以决定:
代理的最大数量。添加代理,直到达到指定的数量。
最小误差下降。从第一个分区开始(每个连接的组件有一个代理),拟合误差为E^算法添加代理,直到近似误差降到指定的百分比 target_drop*E^。
如图所示,指定10%的最小误差下降(黄色虚线)作为停止标准,在平面-球面模型上产生了12个代理。当同时提供两个标准时,满足第一个标准即可停止播种。图描述了不同的播种示例。为了在性能和速度之间取得平衡,我们建议使用分层播种并指定两个停止标准。

使用不同数量的代理来近似平面球体模型。从左到右:8、14、20个代理。我们根据代理的数量来校正错误。
2.2、柔顺操作
对于交互式使用,该方法可以通过添加/删除操作来更好地近似几何形状,并通过额外的操作从局部最小值中隧穿出来:
Merging。合并两个相邻的区域。
Splitting。将一个指定区域分割成更小的区域以减少误差。默认情况下执行二分法,但也可以执行N段法。我们首先从指定区域中选择请求数量的面部种子,然后在该区域内执行重新拟合过程。
Adding。添加一个或多个代理以进一步减少近似误差。对于种子过程,可以递增或分层添加,如图4所示。
Teleporting。传送操作符是合并和添加代理的组合:合并相邻区域对,并向最差区域添加代理种子。更具体地说,选择合并后实现最小误差的区域对进行合并和局部重新拟合。
在实践中,传送操作可以暂时降低或增加总近似误差。我们提供了一个可选的启发式方法来评估传送是否值得,通过验证(模拟)删除引起的误差增加是否小于最差区域误差的一半。如果该测试失败,则认为没有必要进行传送。
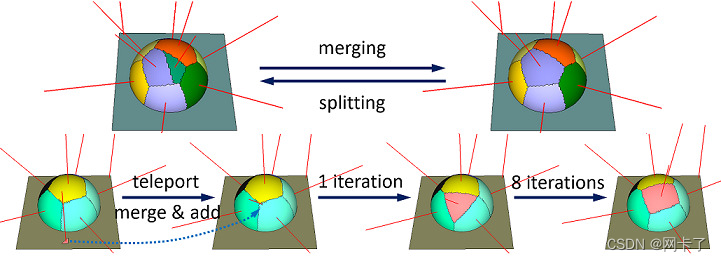
对球体-立方体并集模型的操作。上排:在受限区域上合并(9个代理)和反向平分拆分(10个分区)。下一行:一个隐形传送操作,合并并添加一个面种子,用一个代理来近似球体。
如图所示,远距传物提供了一种方法,可以将平面部分(左)中包含的局部最小区域重新定位到球体(右)上最需要的区域。在类接口中,类接口用于通过上述操作控制近似过程。
2.3、网格划分
该包通过生成聚类分区的三角形网格近似来实现[中描述的网格划分算法。网格划分算法有两个主要步骤:
寻找锚。锚点只是区域边界上输入网格顶点的子集。
离散约束二维Delaunay三角剖分。连接锚点以生成最终近似的三角形网格。
基本锚点
如果顶点是锚:不是网格边界顶点并且与至少三个区域相邻,或者与至少两个区域相邻的网格边界顶点。
细分锚点
沿着代理区域的边界(逆时针方向)行走,弦是一系列连接两个锚点的半边。一个簇边界循环可能由几个弦组成。一个有孔的连接区域可能会产生几个边界循环(图6,传送前的平面部分)。
为了更好地近似复杂的边界,通过递归弦细分生成了更多的锚点(7)。锚点c
在弦(a,b)的最远顶点处添加,将其拆分为(a,c)和(c,b);如果距离d=∥c,(a,b)∥
超过一定阈值。为了使d与输入规模无关
d=d/input_mesh_average_edge_length.
可选地,d可以测量为弦长的比率:
d=d/∥(a,b)∥.
此外,我们可以添加二面角权重sin(Ni,Nj)对于距离测量,其中Ni,Nj是由弦(a,b)分隔的代理的法线;如果代理Pi和代理Pj之间的角度更小,那么粗略的近似就可以了,因为它不会添加关于形状的几何信息。
如果弦不是圆形的,则不会对平凡的弦(少于4条边)进行细分。如果是圆形的弦,则可能会添加额外的锚点来保持拓扑结构,即使它们是平凡的,如“附加锚点”一节中详细描述的那样。

改变弦误差。从左到右:聚类划分,并在没有二面角权重的情况下以减小绝对弦误差5、3和1进行网格划分。分区的边界(红线)以越来越高的精度进行近似。
增加锚点
对于没有任何锚的边界循环,如图6所示的孔,我们首先在边界上添加一个起始锚。然后,我们对这个圆形弦进行细分,以确保每个边界循环至少有2个锚(即,每个弦连接2个不同的锚,图8)。最后,我们添加额外的锚,以确保在每个边界循环上至少生成三个锚顶点。

添加锚点。从左到右:从一个带孔(while)和两个环绕区域(绿色和蓝色)的分区(灰色)开始,我们在没有任何锚点的边界循环(红色虚线)中添加一个起始锚点(橙色圆盘)(第2个),细分圆弦(第3个,数字表示递归级别),并在少于2个锚点的边界周期中添加锚点(第4个,红色虚线)。
离散三角剖分
锚点定义后,它们的弦连接图形成了一个普通的多边形网格。由于非平面、凹多边形或有孔的多边形,我们需要对初始的多边形网格进行三角剖分。三角剖分是通过计算受约束的二维Delaunay三角剖分的离散变体而生成的,其中距离是在输入的三角形网格上测量的。
图的第一幅图描述了如何通过连接3个Voronoi单元相遇的顶点(红色圆圈)所指示的点,从其对偶Voronoi图(由蓝线分隔的彩色区域)中推导出点集(彩色圆盘)的Delaunay三角剖分。以类似的方式,我们构造了离散的Voronoi单元,从中提取三角剖分。
在第一步中,我们开始对该区域的内部进行泛色,根据其最近的锚点对顶点进行着色。然后,我们只对区域的边界进行泛色,以便其上的每个顶点都根据最近的锚点进行着色。这通过强制边界位于其中来强制约束边缘。

球体模型上的离散约束三角剖分。三角剖分过程首先淹没内部顶点(红色箭头,第二个)以模拟Voronoi图。然后,它通过沿边界边进行泛洪处理(红色箭头,第三个),在锚点顶点之间构造受约束的边。最后,通过连接3个Voronoi单元相交的面(红色实心三角形,第4个)的源锚(黑色箭头,第4),形成三角形(红色空心三角形,第四个)。
在每个聚类区域进行三角剖分后,通过计算锚点在其相邻代理上的投影的平均值,重新计算最终的锚点位置。
在下图中,通过L2,1度量来近似熊模型,最终的代理数量是通过监控误差下降来确定的。锚点(黑色)附着在网格上的相应顶点(白色)上。连接锚点的红色线近似每个区域的边界。
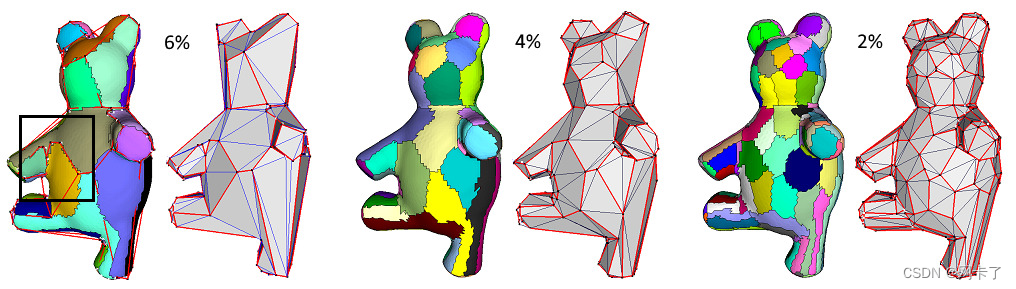
对目标误差下降较小的熊模型进行网格划分。从左到右,目标误差分别比初始误差下降6%、4%和2%,输出网格致密化。请注意黑色矩形区域中的边界细分。
由于无法保证输出网格是2-流形和定向的,因此主输入是一个索引三角形集。我们可以使用多边形汤将三角形汤构建为有效的多边形网格。
2.4、API
这个包可以与CGAL和Boost图库中描述的FaceListGraph概念的任何类模型一起使用。
带有命名参数选项的自由函数。
CGAL::Surface_mesh_approximation::approxy_triangle_mesh():给定三角形网格,使用默认L2,1近似几何。
类接口:CGAL::Variational_shape_approximation:允许对代理、度量和近似过程进行更多自定义。如图2所示,近似和网格划分过程的典型调用顺序为:
初始化种子;运行集群迭代;提取网格;获取输出
需要注意的一点是,有些参数在很大程度上取决于输入,比如代理的数量。尽管无论质量如何,我们都可以使用任何数量的代理来近似几何体,但不建议在不考虑输入的情况下使用所有默认值。
3、性能
我们提供了一些与自由函数API CGAL::Surface_mesh_approximation::approxy_triangle_mesh的性能比较。计时记录在运行Windows10 X64的PC上,该PC配有Intel Xeon E5-1620,频率为3.70 GHz,内存为32GB。该程序已使用Visual Studio 2015的O2选项进行了优化。默认使用的内核是 Exact_predicates_inexact_constructions_kernel (EPICK)。
不同种子方法的目标代理数对应的运行时间(秒)
| Model | #Triangles | #Proxies | Random | Incremental | Hierarchical |
|---|---|---|---|---|---|
| plane-sphere | 6,826 | 20 | 0 | 0.87 | 0.17 |
| bear | 20,188 | 200 | 0 | 36.749 | 1.194 |
| masque | 62,467 | 200 | 0.002 | 133.901 | 4.308 |
不同种子设定方法的目标错误下降的运行时间(秒)。该基准是在拥有20188张面孔的熊模型上运行的。每一列都记录时间和代理的结果数量:
| Target Error Drop | Random | Incremental | Hierarchical |
|---|---|---|---|
| 0.06 | 1.03/64 | 9.053/53 | 1.017/64 |
| 0.04 | 1.207/128 | 15.422/88 | 1.2/128 |
| 0.02 | 1.415/256 | 35.171/192 | 1.428/256 |
算法的三个阶段的运行时间(秒):种子、聚类迭代和网格划分。种子方法是分层的,具有目标数量的代理。
| Model | #Triangles | #Proxies | #Iterations | Seeding | Clustering | Meshing | Total |
|---|---|---|---|---|---|---|---|
| plane-sphere | 6,826 | 20 | 20 | 0.17 | 0.228 | 0.044 | 0.442 |
| bear | 20,188 | 200 | 20 | 1.194 | 0.784 | 0.128 | 2.006 |
| masque | 62,467 | 200 | 20 | 4.308 | 2.974 | 0.349 | 7.631 |
4、背景
VSA方法有两个关键的几何概念:
代理服务器 P,曲面几何形状的参数化最佳拟合替代。
误差度量 E, 测量代理与相应几何体的近似程度。
给定误差度量E,期望数量 k代理和输入表面S,我们用最优形状代理表示代理Pi的集合P与区域Ri相关联R的分割S的使总装配误差最小化。
通过将近似问题转化为最优的离散聚类问题,该算法利用有效的Lloyd算法迭代地降低总误差。更具体地说,在每次迭代中,对m次迭代:
分割过程。首先,将所有三角形面分割成k连接区域{Rm1,⋯,Rmk};通过将每个面部分配给其最近的代理Pm−1i。
拟合过程。然后,算法拟合一个代理并更新参数Pmi;从相应区域Rmi。
对于拟合误差为{E1,⋯,Em}的迭代序列,重复迭代直到满足其中一个停止标准:
达到最大迭代次数:m>=max_iterations。
两次迭代之间没有明显的误差变化:(Em−1−Em)/Em−1<收敛阈值。
.直观地,每个区域Ri分区R的可以概括地表示为一阶“平均”点Xi和“平均”正常Ni我们表示这样的局部代表对Pi=(Xi,Ni),相关区域的平面代理。
定义一个适当的误差度量是该算法的关键要素。L2度量被定义为
其中 Πi(⋅)表示将参数投影到通过 Xi且与 Ni垂直的代理平面上。L2指标试图通过几何位置的近似来匹配输入形状。
在原始论文中,作者提出了 L2,1指标,并认为法线对于形状的视觉解释非常重要。L2,1
定义为:
L2,1在数值上优于L2从几个方面来看:
更好地捕捉了表面的各向异性。
找到最好的法线代理就像求法线平均值一样简单。
5、其他
聚类是一种数据分析和处理技术,其目标是将数据集划分为多个相似的组或“簇”。每个簇中的数据点彼此相似,但与其他簇中的数据点不同。
聚类的过程大致如下:
选择聚类算法:有很多不同的聚类算法,如K-means、层次聚类、DBSCAN等。选择合适的算法对于结果至关重要。
确定簇的数量:在某些算法(如K-means)中,需要预先指定簇的数量。在其他算法中,可能可以自动确定簇的数量。
计算距离:计算数据点之间的距离是聚类的关键步骤。常见的距离度量有欧几里得距离、曼哈顿距离等。
将数据点分配到簇:根据距离度量和其他因素(如密度或连通性),将数据点分配给各个簇。
评估和优化:评估聚类结果,根据需要进行调整,例如更改聚类算法、调整参数等。
Lloyd算法,也被称为Lloyd迭代算法或K-means算法,是一种用于数据聚类的迭代优化算法。其核心思想是通过迭代的方式将数据点分配到不同的簇中,使得每个簇内部的数据点尽可能相似,而不同簇之间的数据点尽可能不相似。
Lloyd算法的步骤如下:初始化:随机选择K个聚类中心,可以随机选择K个数据点作为初始聚类中心。簇分配:将所有的数据点分配到最近的聚类中心,这一步也被称为“簇分配”。中心更新:根据已经分配到每个聚类中心的数据点,更新聚类中心的位置,使得每个聚类中心都处于其所包含数据点的中心位置,这一步被称为“中心更新”。重复进行簇分配和中心更新的步骤,直到聚类中心不再发生变化或者达到预设的迭代次数。
这个算法的主要优点是简单且易于实现,因此在许多领域得到了广泛应用。然而,它也有一些局限性,例如对初始聚类中心的选择敏感,可能会陷入局部最优解等。
 进程状态)


)

)

之 SQL 语句执行流程)











