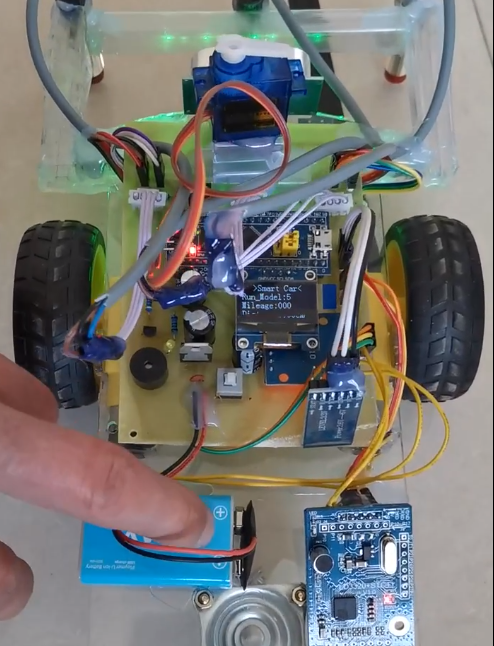
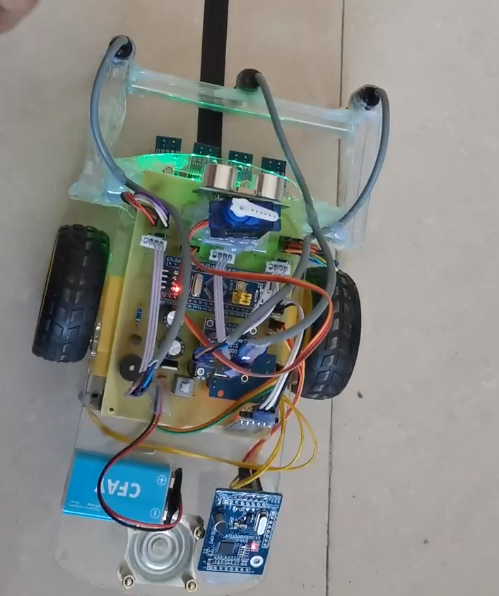
功能描述及设计原理:
小车具有检测里程功能,在金属探测模式,槽型光耦会检测小车车轮的圈数,以此来计算小车行走的里程,并可以通过OLED屏幕显示出来。还可以显示小车的工作模式以及小车距离前方障碍物的距离。
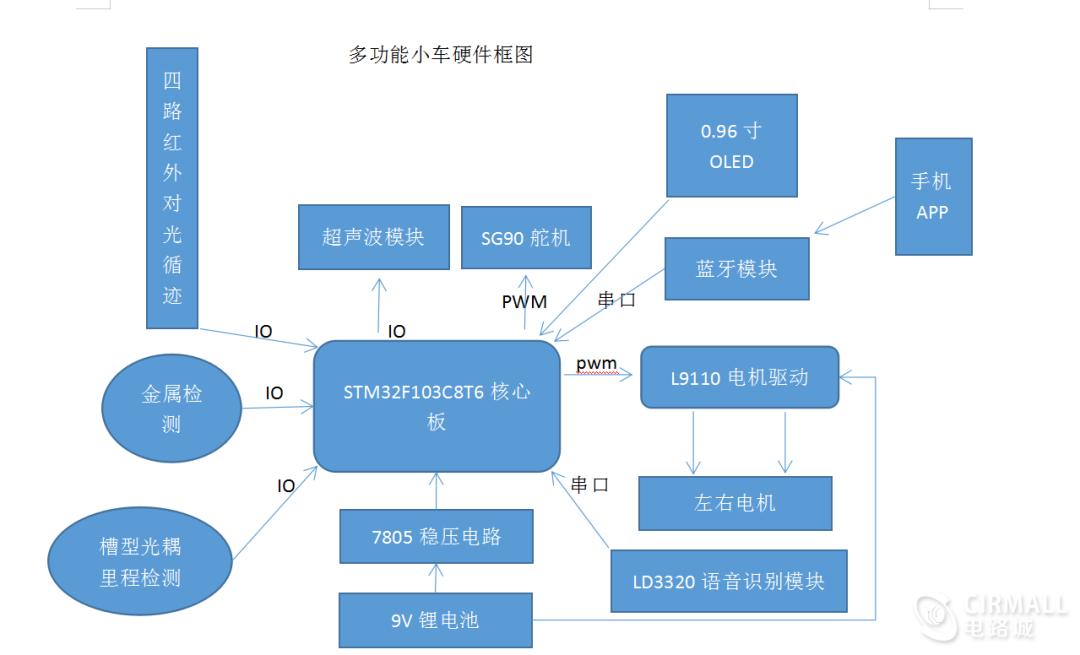
》默认模式:默认为语音控制模式。通过语音控制。可以实现切换到避障模式、金属探测模式、语音控制模式、蓝牙遥控模式、循迹模式。
》避障模式:核心板通过超声波传感器检测前方距离,驱动小车电机进行前进、后退、左右转等操作,且在小车前进时检测前方距离,若小于20cm则自动右转以达到避障目的。
》金属探测模式:小车同时驱动舵机在扫描到金属时,根据金属探测模块探测到的位置,驱动舵机指针指向检测到金属方向,在金属探测模式,自动开启避障功能。
》语音控制模式:小车受控于语音识别模块。距离小车较近处,呼叫“小车”,待看到LD3320语音识别模块亮2个灯时,呼叫“前进”、“后退”、“左转”、“右转”、“停止”即可对小车进行控制,特别注意:语音控制受环境噪声影响比较大,所以在小车行驶过程中,由于小车电机的噪音,是语音控制识别较困难,反应不灵敏,故应近距离大声呼叫,或者重启小车电源,进行重新语音控制。
》蓝牙遥控模式:打开手机蓝牙,并打开控制小车的APP,手机连接小车的蓝牙,连接成功后,即可控制小车“前进”、“后退”、“左转”、“右转”、“停止”。并可控制小车速度。
》循迹模式:在循迹模式。需要有循迹的线路才可以,用黑色的胶带在地上粘出线路出来,然后将小车放在黑线的上面,小车就会沿黑色的线条进行行走。
资料说明:
· STM32程序采用C语言编写,通过Keil5软件编译,文件为工程源代码。
· 电路图为AD格式原理图PCB工程文件,用altiumDesigner打开。
温馨提示:
这个设计是有实物验证的,可以看下演示视频,电路图源文件和源程序都是验证成功可用的,可以说是学习单片机设计制作的好素材!希望这个分享对大家有所帮助!
资料内容包含截图如下,下载后请解压压缩包后打。


视频内容截图:

附件内容截图:
加入群聊
传感器技术交流2群:954070515
射频/无线交流2群:725064756
电机控制研发交流2群:619795552
电源开发交流2群:457910972
EDA/PCB设计交流2群:743876836
物联网技术交流2群:992318230
汽车电子交流1群:238034110
嵌入式交流1群:852018713
电路城官方交流群,期待你的加入。

点击“

)

)

)

)


...)




方法问题)



