原po:高翔slam十四讲-刚体运动
1.旋转矩阵
考虑一次旋转
- Before: 坐标系(e1,e2,e3), 向量(a1,a2,a3)
- After: 坐标系(e1',e2',e3'), 向量(a1',a2',a3')
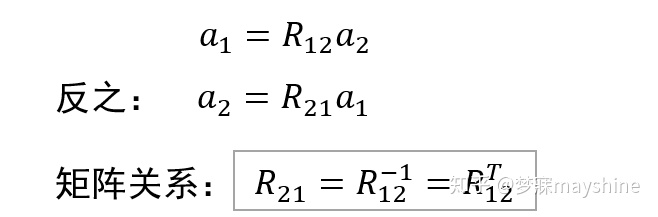
- 即得到a = Ra' R 称为旋转矩阵(R是一个正交矩阵, 行列式为1)

考虑旋转+平移
- 欧拉定理(Euler’s rotation theorem):刚体在三维空间里的一般运动,可分解为刚体上方某一点的平移,以及绕经过此点的旋转轴的转动。
- 即得到a'=Ra+t
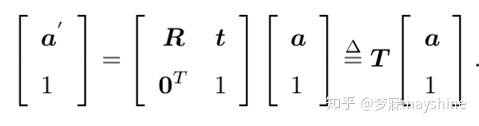
2.变换矩阵——考虑多次旋转+平移
- 齐次形式:
- 即得到a'=Ta T为变换矩阵
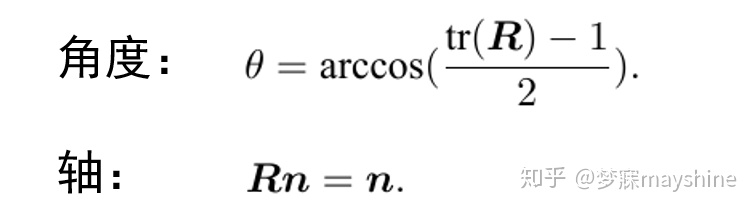
3.旋转向量

4.欧拉角
yaw-pitch-roll Z-Y-X顺序转动
- 绕物体的Z轴旋转,得到偏航角yaw;
- 绕旋转之后的Y轴旋转,得到俯仰角pitch;
- 绕旋转之后的X轴旋转,得到滚转角roll。
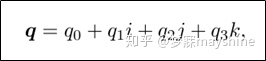
5.四元数

互相转换:
矩阵->向量
向量->矩阵
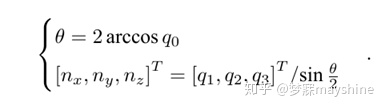
四元数->向量
向量->四元数

四元数->矩阵
矩阵->四元数





求真值表的程序”...)



)

)





——地图实现)

