2019杭州云栖大会上,高德地图技术团队向与会者分享了包括视觉与机器智能、路线规划、场景化/精细化定位、时空数据应用、亿级流量架构演进等多个出行技术领域的热门话题。现场火爆,听众反响强烈。我们把其中的优秀演讲内容整理成文并陆续发布出来,本文为其中一篇。
2019杭州云栖大会高德技术专场讲师系列:
《视觉智能在高德地图的应用》
《高德在提升定位精度方面的探索和实践》
《高德亿级流量接入层服务的演化之路》
阿里巴巴高级无线开发专家宋照春在高德技术专场做了题为《高德客户端及引擎技术架构演进与思考》的演讲,主要分享了高德地图客户端技术架构沿着「上漂下沉」、「模块化、Bundle化」的思路演进所做的一系列架构升级中的经验和思考。
以下为宋照春演讲内容的简版实录:
主要分享三个方面的内容:
- 融合
- 架构治理
- 动态化
一、三管齐下 深度融合
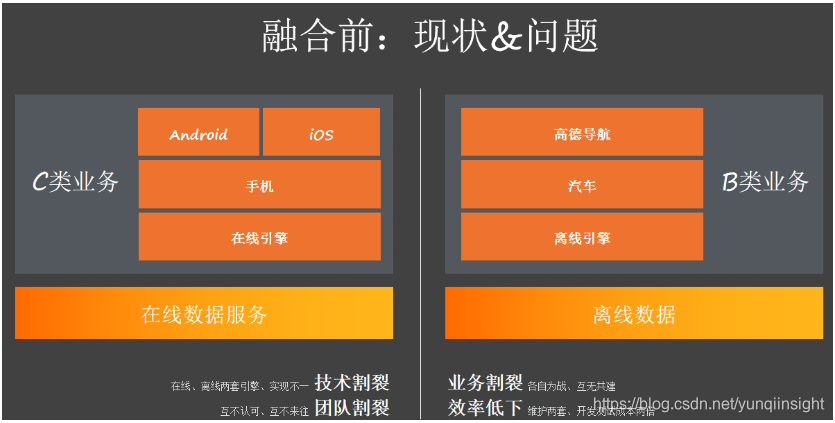
高德最初有两个端,车机版的高德导航,手机版的高德地图,两个团队,一个是2B,一个是2C,分别是汽车业务和手机业务。当时在引擎/技术上,分为离线引擎和在线引擎,但两个团队之间交流比较少,各自有自己的研发、产品和测试,而作为一款端上的APP,两块业务都需要有地图渲染、路线规划、导航以及定位等通用能力。从公司层面看,存在较大的重复建设,整体研发效率较低。
于是我们做了一件事:利用技术手段,打通端上引擎,打造一套能同时支撑多端的APP能力。具体到执行层面,先从A团队拉一部分人到B团队一起建设,建设完之后再从B团队拉到A团队。在同时支撑好主线业务发展的情况下,通过一年左右时间,完成了引擎上的融合,做到同时支撑手机、车机以及开放平台。

这样就从引擎的维度,实现了渲染、定位、规划和引导的统一。具体来说,我们的各大引擎有好多套代码,好几个开发团队,每个团队有各自的开发方式和开发环境(Linux,Windows,Mac OS)。各种开发环境,工程配置文件大量重复,修改非常繁琐。
为此,我们通过两种方法:
1.建立了一套构建系统Abtor,通过一个配置系统实现统一构建,能够同时支持多个子引擎,在构建集成效率上得到了很大的提升;
2.对基础库进行了整体重构,形成了一套涵盖了文件I/O、KV存储、多线程框架&异步框架、归档、基础容器等一系列标准能力的基础库,同时也做了引擎核心架构的统一。

二、架构治理
通过引擎的融合同时支持多端,在研发效率上实现比较大的收益。而通过技术的抓手来实现团队的融合,对公司发展而言,这其实是更大的收益,团队融合的意义在于人才拉通和复用,组织效率得到了较大提升。
随着高德业务的快速发展,业务上持续扩品类,需求量激增,高德地图从最初的驾车导航,到后来的步行、骑行、摩托车导航等等,App所承载的业务发展非常快,而原有的架构治理模式的问题也逐渐暴露出来。
首先就是App的代码规模变得特别大。当时一个仓库达到了10G以上,由此导致的一个典型的问题就是编译慢,编译出一次安装包需要一个小时。伴随代码规模的另一个问题是团队规模快速增长。代码增长和大团队并行开发,最终导致合版慢,每次迭代,客户端合版需要2天。
代码膨胀导致的架构腐化问题特别突出,所以测试质量以及线上的质量有段时间也比较差。此外,从产品提出需求到上线,平均需要45天,版本迭代周期很长。
为解决以上架构问题,我们采取了三个手段:升级Native基础组件,搭建Native容器和页面框架,Bundle化分拆(微应用)。
下面重点介绍下页面框架和微应用。
页面框架主要借鉴和融合了Android和iOS的生命期管理机制。从高德地图App架构看,下层模块是一套标准地图,所有上层业务都要基于地图模块开发。为确保上层业务低耦合、一致性,我们设计了一个页面框架。

如上图,左边的Activity是Android的系统页面控制器,右边的UIViewController是iOS的系统页面控制器,通过虚线连接比较,我们发现两端的页面状态设计基本相同。
所以,我们在设计自己的页面框架时沿用了这些系统页面状态,同时从命名上也保持一致,这样可以让Android和iOS原生开发的同学更容易理解和上手。
我们吸取了双端各自的优点。比如,Android端页面有四种启动模式,但是iOS 端并没有这些,我们就把Android的四种启动模式运用到了iOS端;iOS端有Present特性,但是Android端没有,那么也把这种特性融合到Android端的页面框架中;最后,还有一些小设计,比如Android的onResult设计,也可以借鉴融合到iOS端。
此外,我们还做了微应用,所谓微应用,首先是模块化,就是把大模块仓库大模块拆成一个个小的Bundle,除了实现模块化,还主要实现以下几个目标:
粒度:以业务为单位,以业务线为分组
编译:二进制级别的产物,可独立编译、出包时链接
依赖:松耦合,以“服务”为导向,不关心模块归属
而Native容器层面,要实现四个核心目标:路由管理、服务管理、UI生命期管理、微应用管理。
通过一年时间的Bundle化改造,高德地图单端App完成了300多个页面的建设,拆分了100多个Bundle。
从收益来看,总编译时间从原来的60分钟降低到了8分钟,合版周期从原来的3天降到1天,需求上线周期降到了1个月以内,线上质量和测试质量都得到了极大的提升,崩溃率从万分之八降低到十万分之八。
三、动态化
随着高德地图业务发展沿着扩品类、在垂直品类做精做细,景区、酒店、银行商铺、充电桩等个性化定制需求凸显,对前端展现提出了更高的要求,对“快速应变”要求也更高了。
实际上,在2015年,高德就开始做动态化。最早的时候业内就有React Native,团队做了技术调研,发现不能完全满足业务上的需要,尤其是性能方面。最后我们决定自研一套动态化技术。
具体来说,就是通过一个核心C++引擎,把两端业务(Android、iOS)用一套JavaScript代码解决,实现双端归一,Android实现业务动态化发布。
架构层面,最下面是高德App核心的地图引擎,我们在上面搭建了一套动态化应用引擎,通过C++来实现。应用引擎的作用是为了承上启下,上面承载动态化业务,下层完成地图引擎的直接打通。众所周知,GUI的核心是DOM树,所以应用引擎不但要实现和JavaScript引擎的整合,还要负责DOM树的核心逻辑计算。
其次,动态化的技术和前端Web技术一致:样式、布局。应用引擎负责完成样式的布局计算、DOM树Diff、事件生成。而GUI的绘制,通过Diff事件,交由原生的Android以及iOS去完成。这样,所有的GUI都是原生的组件。
在之上,我们搭建了一套前端框架,前端框架采用当前前端响应式框架做,前端框架之上又搭建了一套前端的UI卡片库和UI组件库,让上层业务能够更高效的开发。
而对于一些通过动态化的技术无法实现,或者性能上存在卡点的功能,我们就通过Native扩展能力来支撑,这样,完整的动态化的业务能够直接运行在Android以及iOS上。
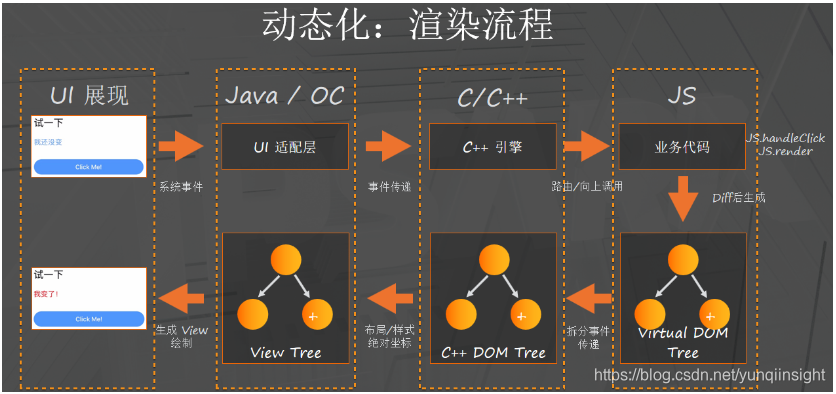
JS去执行代码之后,前端框架会产生虚拟的DOM树,最后提交到C++引擎,形成C++的DOM树。C++引擎去完成布局、样式计算,Diff计算,将每个节点的属性和坐标交给Android以及iOS,由Native来完成最终UI的渲染。
总体来说,动态化的特点:首先是它与主流前端框架融合,充分融合了大前端的生态;第二,性能、扩展性较好。因为采用C++实现整个核心逻辑,静态和动态的语言绑定技术,能够保证地图引擎的能力能够直接透出到上层,或者从上层能够直接call底层的C++能力;第三,多端归一和动态化,充分利用Native优势,接近原生Native体验。
动态化技术改造完成之后,双端不一致的问题降低了90%,开发、测试成本降低30%,发版周期从T+30到T+0。
最后,总结下高德客户端及引擎技术架构演进的几个重要阶段:第一个阶段,通过在线&离线引擎的融合拉通,让高德最核心的导航能力提到提升;第二阶段,在客户端发展成为“巨型”APP,代码量发展到超大规模的时候,通过架构治理,满足业务快速增长的诉求,解决大规模业务体量下的架构合理性问题,消除架构瓶颈;第三个阶段通过动态化的技术,实现多端归一,以及动态发版能力,为业务发展提供更大的助力。
原文链接
本文为云栖社区原创内容,未经允许不得转载。