
来源:传感器技术
摘要:埃塞俄比亚航空公司波音737 MAX 8型客机当地时间10日坠毁,这是时隔不到5个月,波音同一型号飞机发生的第二起空难。鉴于两起事故具有明显的相似性,越来越多的将目标指向了该型号的设计缺陷——飞控系统存在BUG是导致这两起事故的根本原因。目前,越来越多的国家和航空公司已宣布停飞该机型。
那么,飞控系统到底是什么?为什么一个小小的代码错误会导致这么严重的后果?下面,就由小编来带你作进一步的深入了解。
实际上,现代民用飞机飞行控制系统(简称“飞控”),是整个飞机机载系统的核心,也是整架飞机最复杂的系统之一。
飞行控制系统的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。最简单的人工飞行控制系统就是机械操纵系统。不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
飞行控制系统的功能
随着飞行任务的不断复杂化,对飞机性能的要求越来越高,不仅要求飞行距离远(例如运输机),高度高(高空侦察机),而且还要求飞机有良好的机动性(例如战斗机)。为了减轻驾驶员在长途飞行中的疲劳,或使驾驶员集中精力战斗,希望用自动控制系统代替驾驶员控制飞行,并能改善飞机的飞行性能。这种系统就是现代飞机上安装的飞行自动控制系统。

飞行控制系统的功能归结起来有两点:1、实现飞机的自动飞行;2、改善飞机的飞行性能。
飞机的自动飞行控制系统在无人参与的情况下,自动操纵飞机按规定的姿态和航迹飞行,通常可实现对飞机的三轴姿态角和飞机三个方向的空间位置的自动控制与稳定。例如,无人驾驶飞行器(如无人机或导弹等),实现完全的飞行自动控制;对于有人驾驶的飞机(如民用客机或军用飞机),虽然有人参与驾驶,但某些飞行阶段(如巡航段),驾驶员可以不直接参与操纵,而由飞行控制系统实现对飞机飞行的自动控制,但驾驶员应完成对自动飞行指令的设置和监督自动飞行的情况,并可以随时切断自动控制而实现人工驾驶。
采用自动飞行具有以下优点:
1、长距离飞行时解除驾驶员的疲劳,减轻驾驶员的工作负担;
2、在一些恶劣天气或复杂的环境下,驾驶员难于精确控制飞机的姿态和航迹,自动飞行控制系统可以精确对飞机姿态和航迹的精确控制;
3、有一些飞行操纵任务,驾驶员难于精确完成,如进场着陆,采用自动飞行控制则可以较好地完成任务。
一般来说,飞机的性能和飞行品质是由飞机本身气动特性和发动机特性决定的,但随着飞机飞行高度及飞行速度的增加,飞机的自身特性将会变坏。如飞机在高空飞行时,由于空气稀薄,飞机的阻尼特性变坏,致使飞机角运动产生严重的摆动,靠驾驶员人工操纵将会很困难。此外,设计飞机时,为了减小质量和阻力,提高有用升力,将飞机设计成静不稳定的。对于这种静不稳定的飞机,驾驶员是难于操纵的。在飞机上采用增稳系统或阻尼系统可以很好地解决这些问题。
飞控系统的发展历史
自动飞行控制系统已有一百多年的研制历史。1891年海诺姆·马克西设计和建造的飞行器上就安装了改善飞行器纵向稳定性的飞行控制系统。
后来,直到二十世纪初,由于飞行器本身性能的不断改善,而自动控制理论也处于发展初期,因此飞行器的自动控制发展缓慢;
二十世纪中期以后,随着飞行任务的不断复杂化,对飞行器性能要求越来越高,如希望运输机飞行距离要远,侦察机飞行高度要高,而战斗机要有良好的机动性,希望飞机便于操纵,减轻飞行员的负担,这就使自动控制成了不可回避的问题,这样就出现了飞行控制系统。
1、1912:爱莫尔.斯派雷,电动陀螺稳定装置,自动驾驶仪诞生;
2、埃尔默•斯佩里后来又发明了陀螺罗盘、陀螺地平仪和侧滑指示器等一系列飞行仪表,使飞行员可以在夜间和复杂气象条件下,按仪表指示操纵飞机,对人类航空技术发展作出了突出的贡献。
飞机操纵系统的第二次重大突破是电传操纵系统的出现。电传操纵系统真正使用于飞机,发生在20世纪70年代。在采用电传操纵系统的飞机上,没有了传统的钢索和连杆等机械传动机构,飞行员完全通过电信号来操纵飞机。
1975年,美国空军在A-7D型飞机上试验数字战术飞行控制系统时,开始使用光纤作为数据传输线。光纤技术和数字式电传操纵系统相结合,产生了光传操纵系统的概念。
50年代前自动驾驶仪用于运输机和轰炸机的平飞。(飞机自动驾驶仪逐渐与机上其他装置耦合以控制航迹(定高和自动下滑等),既能稳定飞机,又能全面控制飞机,直至全自动着陆。
60年代自动驾驶仪功能扩展成为飞行控制系统,产生了随控布局飞行器设计新思想。
80年代已在研制把火控系统、推进装置控制系统和飞行控制系统集成为火/飞/推综合控制系统,以使各系统协同工作,更完善地完成飞行任务。
飞控系统的组成
飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。
控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。
传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。
飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。
作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。
自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。
信息传输链用于系统各部件之间传输信息。常用的传输链有电缆、光缆和数据总线。接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。
飞控系统的工作原理
人工驾驶飞机基本过程
如果飞机在平飞过程中,由于某中外界干扰使飞机抬头,不在保持水平状态。驾驶员从地平仪上观察到这个姿态角(俯仰角)的变化,反映到大脑中,经过思维判断立即做出如何操纵飞机的决定,指挥手去推动驾驶杆,驱动升降舵向下偏转,产生相应的下俯力矩,使飞机低头恢复水平姿态。驾驶员又从仪表上看到这一变化,逐渐把驾驶杆收回原位。当飞机回到原态(水平)时,驾驶杆和升降舵也回到原位。整个过程如图所示。
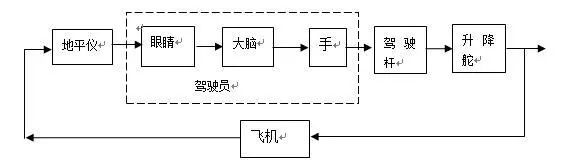
这是一个反馈系统,即闭环系统。图中虚线表示驾驶员,如果用自动驾驶仪代替驾驶员控制飞机飞行,自动驾驶仪必须包括与虚线框内三个部分相应的装置,并与飞机组成一个闭环系统。
自动飞行的原理
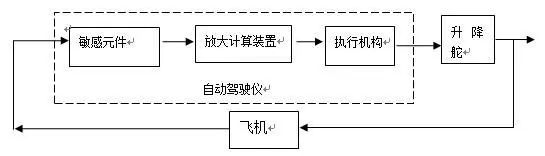
当飞机偏离原始状态,敏感元件感受到偏离方向和大小,并输出相应信号,经放大、计算处理,操纵执行机构(如舵机),使控制面(例如升降舵面)相应偏转。由于整个系统是按负反馈原则连接的,其结果使飞机趋向原始状态。当飞机回到原始状态时,敏感元件输出信号为零,舵机以及与其相连接的舵面也回到原位,飞机重新按原始状态飞行。
由此可见,自动驾驶仪中的敏感元件、放大计算装置和执行机构可代替驾驶员的眼睛、大脑神经系统和肢体,自动地控制飞机的飞行。这三部分是自动飞行控制系统的核心,即自动驾驶仪。
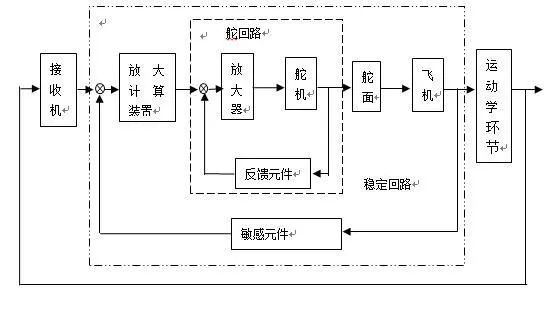
为改善舵机的性能,通常执行机构引入内反馈(将舵机的输出反馈到输入端)形成随动系统(或称伺服回路),简称为舵回路。舵回路是由舵机、放大器及反馈元件组成,如图虚线框内所示。
反馈元件包括测速机和/或位置传感器。测速机测出舵面偏转的角速度,反馈给放大器以增大舵回路的阻尼,改善舵回路的性能,位置传感器将舵面位置反馈到舵回路的输入端,使控制信号与舵面偏角一一对应。舵回路的负载是舵面的惯量和作用在舵面上的气动力矩(铰链力矩)。
自动驾驶仪与飞机组成一个回路——通常称为稳定回路。这个回路的主要功能是稳定飞机的姿态,或者说稳定飞机的角运动。敏感元件用来测量飞机的姿态角。由于该回路中,包含了飞机,而飞机的动态特性又随飞行条件(如速度、高度等)而异,使稳定回路的分析变得较复杂。
如果用敏感元件测量飞机的重心位置,而飞机还包含了运动学环节(表征飞机空间位置几何关系的环节),这样组成一个更大的新回路,控制回路(或控制与导引回路,简称制导回路)。
以飞机自动下滑着陆系统为例,说明控制原理。这里只说飞机的纵向(俯仰、上下和前后)运动。要求飞机在着地前沿预定航迹下滑到预定高度(十几米),然后将飞机拉平,飞机不断下降,最终以允许的下降速率着陆。预定的下滑航迹是由机场的无线电装置形成的。
飞机处于预定下滑航迹,飞机上相应的无线电接收机输出信号为零。飞机偏离下滑航迹,接收输出相应极性和幅值的信号,送至稳定回路,在自动驾驶仪的控制下飞机回到下滑航迹。例如飞机在预定下滑航迹的上方,接收机将某极性的信号送给自动驾驶仪使升降舵下偏,产生低头控制力矩,使飞机进入下滑航迹。飞机进入下滑航迹后,接收机输出为零,舵偏角为零,飞机保持在下滑航迹上。飞机重心的运动(即空间位置的变化)是通过控制飞机角运动来实现的。
自动飞行控制系统的组成
自动飞行控制系统由自动驾驶仪、自动油门杆系统、自动导航系统、自动进场系统和自动着陆系统、自动地形跟随/回避系统构成。
自动驾驶仪
顾名思义,自动驾驶仪是用来代替驾驶员操纵飞机的自动控制系统。它由控制显示面板、传感器、自动驾驶仪计算机和舵面作动器组成。

自动驾驶仪的传感器信息主要来自航空电子系统的航向/姿态参考基准、高度和高度差信号。它的主要功能是航向角、姿态角的给定和保持以及飞行高度(包括气压高度和相对高度)的给定和保持。在长时间的稳定飞行(如巡航)中使用自动驾驶仪控制飞机,可以大大减轻驾驶员的工作负担。
自动油门杆系统
自动油门杆系统是一种经常与自动驾驶仪配合使用的系统。它通过驱动油门杆改变发动机推力而对飞机的飞行速度(或马赫数)进行自动控制。
系统使用的传感器信息是大气数据计算机的飞行速度(或马赫数)信号。一般不具备独立的计算机而由自动驾驶仪计算机完成控制律计算。执行机构是油门杆作动器。自动油门杆与自动驾驶仪配合工作,可以精确控制飞机的航迹、姿态及飞行速度。这对于飞机的自动进场/着陆、自动地形跟随/回避以及四维制导飞行,都起着非常重要的作用。
自动导航系统
自动驾驶仪与导航系统交联,即构成自动导航系统。导航系统通过总线或其他装置(如飞行管理计算机)将飞机当前的位置和航向偏差信号送入自动驾驶仪计算机,由自动驾驶仪计算机形成并输出控制指令,将飞机的位置和航向调整到并保持在预先给定的航线上飞行。
自动着陆系统
着陆是飞行器航行中的一个重要阶段。着陆时,飞行员必须在很短的时间内完成许多要求很高的操作,若仅靠目视着陆,为保证安全,飞行员需要在很远的距离上就能清晰的看到跑道。以民航飞机为例,要求在飞行高度不低于300m时,水平能见度不小于4.8km。为了保证飞机能在夜间或不良气候条件下安全着陆,必须由无线电导航系统向飞行员提供飞行器与正确的下滑航道之间偏离程度的高精度指示。

常用的进场和着陆导引系统有仪表着陆系统、微波着陆系统和精密进场雷达/数据链导引系统等。20世纪90年代以来,基于全球定位系统(GPS)的进场着陆导引技术发展迅速,将成为21世纪进场着陆导引系统的主流。自动着陆系统利用导引信号将飞机控制到预定航道,并沿着航道下滑和着陆。
目前民航机场主要使用的着陆无线电导航系统为仪表着陆系统 (ILS,Instrument Landing System)和微波着陆系统 (MLS,Microwave Landing System)。前者可引导飞机在I类气象条件(水平能见度800m,决断高度60m)或II类气象条件(水平能见度400m,决断高度30m)下着陆(称为仪表着陆或盲目着陆);后者可引导飞机在III类气象条件(水平能见度低于200m及其以下,决断高度0m)下着陆(称为自动着陆)。

对飞机自动着陆来说,仪表着陆和微波着陆系统都是使用非目视着陆引导设备,其基本原理都由机场上的仪表着陆和微波着陆系统在跑道上空形成下滑道,飞机上安装了相应的无线电接收机,当飞机处于预定下滑道上时,接收机输出信号为零;若飞机偏离下滑道,则接收机输出相应极性和幅值的信号。接收机输出的电信号通过自动驾驶仪操纵舵面(一般方向舵和升降舵),使飞机进入下滑道。例如设飞机处于下滑道上方,接收机将输出反映上方极性的信号,通过自动驾驶仪使升降舵面后缘向下,产生低头力矩,使飞机飞向下滑道,接收机输出逐渐减小,直至飞机进入下滑道输出为零,升降舵面恢复原来位置,飞机保持在下滑道上逐渐降低高度,实现自动着陆。
自动地形跟随/回避系统
自动地形跟随/回避系统用于控制军用飞机在超低空(一般指相对高度100m以下的空域)突破敌人防线的飞行,利用地形、地物造成的雷达盲区和杂波反射进行隐蔽,使敌人防空雷达很难发现。使用自动驾驶仪和自动油门杆系统基本部件与地形探测和定位系统相交联,可用于实现自动地形跟随/回避功能。

常用的地形探测和定位系统是地形跟随和地物回避雷达。目前,一些先进的军用飞机已经采用惯性导航/全球定位系统的组合导航系统(INS/GPS)与三维数字地图相配合的自主定位系统作为自动地形跟随/回避系统的主信息源,以低可探测性的激光测距器等为辅助手段实现超低空突防飞行,进一步提高了低空突防的隐蔽性。
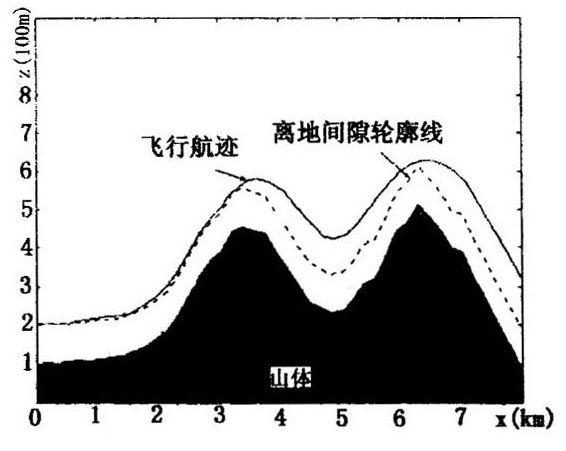
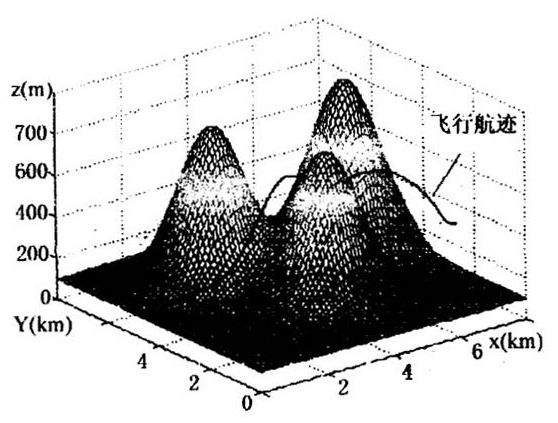
自动控制飞机沿地形垂直剖面上空飞行的系统,称为自动地形跟随系统。自动地形跟随/回避系统则可以控制飞机按预定航线绕过山峰在“山沟”里飞行,飞行轨迹是三维的,具有更好的隐蔽性。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”






super关键字)













