 来源: 人机与认知实验室
来源: 人机与认知实验室
【ACT—R模型最大的不足在于缺乏意向性与形式化的有机结合,这也是AI的瓶颈之一】
哈耶克在默知识的基础上发展出了一整套体系,他说:“因为默知识不可表达,所以不可记录,所以不可集中,所以计划经济不可行。”也就是说,哈耶克从哲学上、从认识论上证明了计划经济根本就是不可行的。 实际上,人的认知之所以难以准确预测也与此相关:隐性的知识和干扰也常常令描述和程序难以成行。这些暗知识不止是个体间的小行为中,还有组织、系统、体系间的大行动。 简单地讲,现在许多人因此认为:智能并不仅是算法的问题,算法是实现层面的,但理论上都没跑通,直接开发只是盲目地碰运气调参。简单地说,即是没有认识论就直接谈方法论! 然而,目前的人工智能却在反其道而行之:没有公理,照样傲娇+不懂力学,照样进球!
未来的区块链、飞机、电网等将是人机融合的系统,安德森的ACT-R认知框架模型正在尝试这种融合,其优点如下所述(这里不在赘述),其缺点仍然没有解决波兰尼的默会知识与程序性/描述性知识衔接问题。

1、引言
提起百年老字号这个词大家的第一反应或许是同仁堂、全聚德等有历史底蕴、文化传承的传统行业,很难使其与互联网联系在一起,但在智能行业里面也有百年老字号,它就是蓝色巨人——IBM(International Business Machines Corporation),出生于1911年的IBM没有像我们人类那样白发苍苍满脸皱纹,反而越活越年轻,之所以这样说是因为它总是站在时代的前列,引领一个时代的到来,它是智能行业里经验丰富的“老船长”在复杂的人工智能海洋里位我们指引前进的方向。在由中国人工智能学会发起主办、CSDN承办的2015中国人工智能大会(CCAI 2015)上IBM中国研究院大数据及认知计算研究总监苏中发表了题为《从WATSON到认知计算》的主题报告,报告介绍了IBM在认知计算领域所做的工作和取得的成果; 2016年1月7日IBM宣布,将转型成“CognitiveSolution &Cloud Platform Company” (认知解决方案和云平台公司),相信IBM的这次转型也是这位“老船长”为互联网“航海”行业的又一次迷津指点。

作为人工智能的一个重要领域——认知计算,已经有国内外诸多学者在这个领域耕耘努力,今天为大家介绍的是卡耐基梅隆大学心理学和计算机科学教授约翰·罗伯特·安德森(John RobertAnderson),安德森教授在2016年1月16获得了美国国家科学院(National Academy of Sciences)奖以表彰其在研究我们学习规律上的革命化的成就,安德森的代表性的研究成果是理性思维的自适应控制系统ACT-R(AdaptiveControl of Thought—Rational)。下面我们将以安德森的ACT-R认知框架为基础探讨认知智能。
2、ACT-R
ACT-R模型是一个人类认知理论,由美国人工智能专家和心理学家安德森(JohnR.Anderson)等人建立。该理论试图理解人类如何获得和组织知识以及如何产生智力活动。其研究进展基于神经生物学研究成果并从中得以验证。ACT-R已成功地为许多不同认知现象建立起合理的模型,包括感觉和注意、学习和记忆、问题解决和制定决策、语言加工、智力动因(intelligentagents)、智力教师系统(intelligenttutor systems)和人机交互等。
2.1 发展历程
ACT-R理论起源于人类联想记忆模型理论(human associative memory HAM)。起初该理论只涉及陈述性知识的表征以及这些表征如何影响行为,并没有讨论程序性知识。而后,安德森提出了陈述性知识和程序性知识的区别。通过借鉴纽厄尔(Newell)的思想,他提出程序性知识由产生式规则实现。于是体现程序性和陈述性结合理论的产生式系统模型ACTE问世了。经过7年的发展,他们建立起了一个称为ACT的理论,该理论包含一系列关于该系统在神经学上如何实施的假设,以及产生式规则如何获得的物理学上的假设。这个认知系统持续了10年时间,直到安德森提出了一个新系统ACT-R。该系统反映了过去十年技术上的发展,现在作为一小部分研究团体的计算机模拟工具。该版本系统的关键想法是,在环境的统计学结构下,系统为了给出适应性的表现,知识的获得和调用过程会随环境而发生改变。
ACT-R已经经历了好几次版本的升级。1998年,《思维的微小组成》(Theatomic components of thought)一书的出版标志着ACT-R4.0的推出。以安德森和Lebiere的观点,ACT-R4.0是ACT-R多个版本中第一个真正实现纽厄尔关于认知统一化理论梦想的版本。在ACT-R4.0中,ACT-R为纽厄尔确定的统一认知领域(即问题解决,决策制定,常规行动、记忆、学习和技能)中的前两个领域的认知现象建立了成功的模型。而在随后的ACT-R5.0版本中建立起了知觉——动力系统ACT-R/PM,后又成功地为第三组领域(知觉和动力行为)建立了模型。最近,ACT-R6.0版本也已经发布。
2.2 理论基础
作为一种认知理论,ACT-R主要建立在两个假设之上:一是对人类认知的理性分析;二是陈述性知识和程序性知识的区分。从后面的介绍中我们可以看到,关于ACT-R理论的论述主要基于理性分析和三个简单的二分法。
2.2.1 理性分析
所谓理性原则(rationalprincipal),就是指认知系统在其运算限制的前提下,其每个成分都尽可能使来自环境中的要求达到最佳的满足。如果我们想知道认知结构某个特定方面如何运转,我们首先需要考虑这个方面如何运转才能尽可能地在环境中达到最优化。无论选择使用什么策略或选择提取什么记忆元素,ACT-R会选择有着最高期望获得值的一个,也就是有着最低期望代价同时有着最高期望成功概率的一个。
2.2.2 三个二分法
ACR-R理论建立的另一基础是如下三个简单的二分法:
(1)两类知识:关于事实的陈述性知识(declarativeknowledge)和关于如何完成各种认知活动的程序性知识(procedural knowledge);
(2)两个假设:关于ACT-R如何运用已有知识去解决问题的操作假设(performanceassumptions)和关于如何获得新知识的学习假设(learning assumptions);
(3)两个水平:有关离散知识结构的符号水平(symboliclevel)和有关神经系统激活过程的亚符号水平(sub-symboliclevel),这一水平决定符号结构的可用状态。
2.2 理论架构
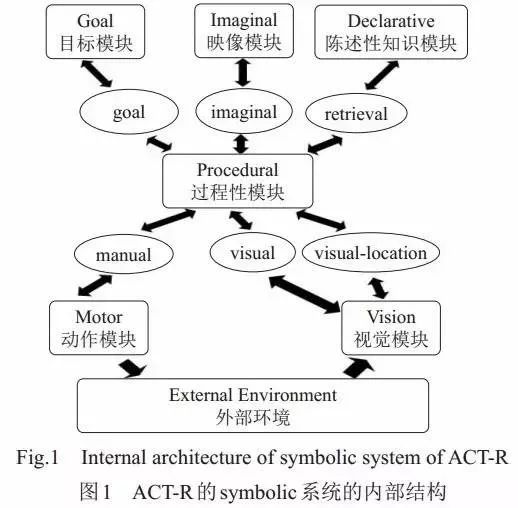
ACT-R系统是一个混合型认知体系结构,由symbolic系统和sub-symbolic系统两部分组成。因为subsymbolic系统构成的是模块内部的工作方式,所以无法显式地在图中表达。从图 1中可以看到ACT-R的symbolic系统内部结构,整个系统由若干不同模块组成,其中最重要的过程性模块通过缓冲块将其他所有模块连接成一个整体。symbolic系统本身可以看作由一个产生式系统驱动的模型,通过过程性模块中的产生式规则来对不同模块的缓冲块进行操作。运行在外部结构后台的sub-symbolic 系统通过一系列的数学方法对symbolic系统中模块内部的操作进行控制。
3、应用与思考
3.1 ACT-R认知框架应用
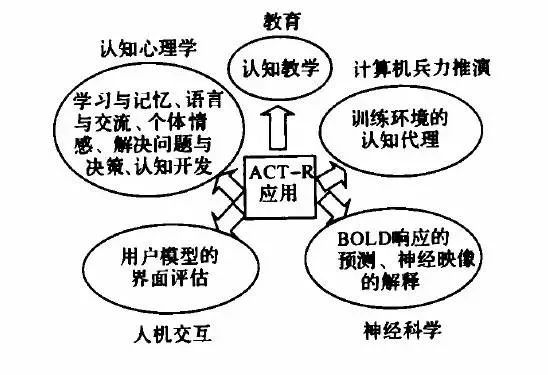
图2ACT-R认知框架应用示意图
3.1.1 在教育、学习方面的应用
Anderson及其团队多年来致力于有关学习、记忆与大脑神经的研究,才在长时间的探索中孕育出了ACT-R理论体系。因此,该理论在有关教育、学习的领域得到广泛的关注与应用。其中,又以学习迁移为该理论与应用主要的契合点。迁移是一种长期受到人们关注的心理现象,它的基本含义是:在先前的学习(或训练)中获得的知识和技能,对学习新知识、新技能或解决新问题所产生的影响,Singley和Anderson曾指出“学习迁移的研究是对所有的综合性认知学习理论的一个严格的也是必要的检验”。关于迁移,安德森等人提出了“共同要素理论”。这一理论实质上是桑代克的相同要素理论在信息加工心理学中的新版本,它的特点是以产生式规则取代了相同要素。理解知识如何在领域间迁移关键取决于认知任务分析(检查一个领域中已获得的知识结构,并评估对另一领域的应用性)。按照“共同要素理论”,两种技能之间发生迁移的条件是,它们之间必须共用相同的程序性知识,并且,两种技能之间的迁移量,可以通过计算它们共用的程序性知识的数量来作出估计:(1)如果两种技能共用较多的程序性知识,它们之间将产生显著的迁移;(2)如果两种技能共用较少的程序知识,即使它们共用相同的陈述性知识,它们之间也将产生很少的迁移或者没有迁移。第一个假设得到了有力的实验支持。例如,在使用不同编辑器进行文字编辑的技能和用不同计算机语言进行编程的技能的实验研究中,都发现共用程序性知识的数量与迁移的有规律的关系,即共用产生式的数量越多,迁移量越大。对于第二个假设,在几何证明和计算机编程等领域的研究中,也有一些实验证据。例如,在一项研究中,Neves和Anderson发现,被试花了10天时间进行“解释几何证明”的训练后,并没有对解决需要相同知识的几何证明题产生迁移。在另一项研究中,McKendree和Anderson首先让被试完成150个LISP程序的评价任务,然后完成16个LISP程序的编写任务;接着,又让这些被试完成450个LISP程序的评价任务,然后再完成16个LISP程序的编写任务。他们发现,被试第二次完成LISP程序的编写任务的成绩并没有提高。
然而,以上实验结果受到一些研究结果的挑战。例如Kersney的研究表明,在编写LISP程序和调试LISP两种技能之间,存在着显著的迁移。Pennington等也在“编写LISP程序”和“评价LISP程序”之间发现了显著的迁移。在对这些实验结果进行讨论时,Pennington认为,“编写LISP程序”和“评价LISP程序”之间的迁移不是一种“程序性迁移”(procedural transfer),而是一种“陈述性迁移”(declarative transfer)。也就是说,在对其中一种子技能进行训练的过程中,被试对训练前获得的陈述性知识进行了精细加工,从而使得在完成另一种技能的任务时,能够更快地将陈述性知识转化为程序性知识,并减少了错误。对于片面强调程序性知识的作用的“共同要素理论”来说,这一观点是一个重要的补充。
我国有学者在“共同要素理论”的基础上提出了迁移的四因素理论,认为两种技能之间的迁移,受程序性知识之间的关系、对陈述性知识的精细加工、对程序性知识的精细加工、被试的先前认知能力四个因素的综合影响。近年来,问题解决中的迁移成为认知心理学的关注热点。有大量的证据表明,被试的早期问题解决技能深受与相似例子的类比的影响。问题解决中的类比策略表现了学习迁移在问题解决中的作用。显然,样例在问题解决和迁移中起着重要的作用,因此,样例学习研究的价值和重要性就不言而喻了.大量的研究都证实了样例学习的诸多优点,但也有一些研究表明,样例学习有许多弊端。如何设计样例结构或创设样例学习系统减少负面影响,更好地发挥样例的作用是值得我们研究的课题。
3.1.2 ACT-R 驾驶认知行为建模应用
驾驶认知的描述主要有3个组成部分:驾驶任务中具体化的驾驶认知(embodied cognition) 、驾驶执行的任务(task)以及完成驾驶任务驾驶员所使用的操作部件(artifact),把它们简称为ETA。
驾驶建模的目标是对ETA 部分严格意义上的描述, 即使模型能够处理尽可能多的驾驶相关任务,同时融入实时控制及车辆动力学, 通过实时感知与运动过程交互的认知过程执行驾驶任务。已有的多数成功的驾驶行为模型证实: 严格意义建模无论对于驾驶员行为的理解还是模型理论本身在实际系统开发中的实践应用都是非常重要的。
基于前面对ACT-R 体系以及驾驶ETA 的描述, 可以想象ACT-R 认知体系上的驾驶行为模型必须是一个产生规则的执行系统, 同时能够处理外部输入并产生输出,在特定约束下执行诸如控制、监测和决策的驾驶任务。
为了突出认知行为建模,必须把精力集中在认知体系上;重点强调认知体系的驾驶模型的开发。认知体系是人类认知能力针对特定计算行为模型的通用框架。模型把人作为系统所具有的行为能力和受限制具体化。人的行为能力是指记忆、回忆、学习、感知以及完成动作等能力;人受到的限制如记忆力的减退、视网膜对周围信息编码的错觉以及运动能力的限制等。认知体系必须保证基于其开发的认知模型是严密的并且在心理学上没有歧义, 因此体系应完全遵循人作为一个有机体时所满足的所有限制。选择ACT-R 认知行为体系作为驾驶模型框架, 是因为它是包含由知识单元组成的说明性知识库、作用于知识单元的条件响应产生规则构成的产生系统。
前面提到ETA 是驾驶最重要的组成部分, 事实上,基于ACT-R 的驾驶认知行为的开发特别适合对ETA 所有3 个组成部分的表述。 ACT-R 具备从基本的实验室工作到复杂动态任务中的高层认知和决策、适用范围较广的建模能力, 可以完全或几乎完全模拟人与其所处真实的环境交互。因此, 基于ACT-R体系的模型必须遵守与人真实认知同样的输入/ 输出限制和真实环境所具有的动态性。为了做到这点, 模型通过感知过程和运动行为来同时表达或描述人认知的内在工作和感知的外部表现这两个方面。显然, 这些特征使认知体系特别适合于对驾驶员许多重要方面的行为进行模拟。
3.2 关于认知智能的思考
认知计算,我们指的是自然语言处理、分析学、机器学习及其他的混合体。大数据分析离不开认知计算,所以构建认知计算框架对大数据分析很重要。ACT-R作为一种对人的认知理性分析的认知计算框架,建立在前面叙述的一些假设上面,对真实的人的认知行为进行了简化假设。人的认知过程中还涉及到人的情感因素、创造因素,现在人工智能领域研究的认知计算均未涉及到人的情感和创造两个因素,就连人工智能航海“船长”——IBM虽然宣称转型做认知解决方案,但是其认知解决方案代言人Watson也没有涉及到这两个因素,我们认为这或许可以作为认知计算的一个切入点突破点。

未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”






)











)

