文章目录
- 1 条件随机场定义
- 1.1 马尔科夫随机场
- 1.1.1 用图模型表示概率
- 1.1.3 三个马尔科夫性
- 1.1.3 重点再看局部马尔科夫性
- 1.2 马尔科夫随机场的因子分解
- 1.3 条件随机场
- 1.4 线性链条件随机场
- 2线性链条件随机场的表示形式
- 2.1 参数化形式
- 2.2 简化形式
- 2.3 矩阵形式
- 3 条件随机场的概率计算
- 4 条件随机场的学习算法
- 4.1 最大熵模型
- 4.1.1最大熵模型定义
- 4.1.2 最大熵模型学习
- 4.2 条件随机场的学习算法
- 5 条件随机场的预测算法
1 条件随机场定义
1.1 马尔科夫随机场
1.1.1 用图模型表示概率
图G=(V,E),V表示顶点集合,E表示边的集合。
概率图模型表示用图表示概率的分布。
可以用无向图G表示联合概率分布P(Y)。Y一定是一个矢量。
顶点v∈Vv \in Vv∈V表示一个随机变量YvY_vYv,Y=(Yv)v∈VY = (Y_v)_{v \in V}Y=(Yv)v∈V。
边e∈Ee \in Ee∈E表示随机变量之间的概率依赖关系。
这样对联合概率分布的计算转为对无向图的计算。联合概率分布P(Y)需要满足三个马尔科夫性。
1.1.3 三个马尔科夫性
1 成对马尔科夫性
讲的是两个没有边连接的节点,联合概率等于概率的乘积。
假设无向图G中,u和v是两个没有边连接的结点,分别对应随机变量YuY_uYu,YvY_vYv。其他所有节点为O,对应随机变量组YOY_OYO。那么:
P(Yu,Yv∣YO)=P(Yu∣YO)P(Yv∣YO)P(Y_u,Y_v|Y_O)=P(Y_u|Y_O)P(Y_v|Y_O)P(Yu,Yv∣YO)=P(Yu∣YO)P(Yv∣YO)
2 局部马尔科夫性
讲的是一个节点和与它没有任何边连接的节点的集合,联合概率等于概率的乘积。
假设无向图G中,v是任意一个结点,对应随机变量YvY_vYv。W是与v有边连接的所有节点的集合,对应随机变量组YWY_WYW。O是v和W之外的所有节点,对应随机变量组YOY_OYO。那么:
P(Yv,YO∣YW)=P(Yv∣YW)P(YO∣YW)P(Y_v,Y_O|Y_W)=P(Y_v|Y_W)P(Y_O|Y_W)P(Yv,YO∣YW)=P(Yv∣YW)P(YO∣YW)
3 全局马尔科夫性
讲的是两个集合,一个集合中的任意一个点,与另外一个集合中的任意一个点没有边连接, 那两个集合的联合概率等于概率的乘积。
假设节点集合A、B,是在无向图G中被集合C分开的任意节点的集合,分别对应随机变量组YAY_AYA,YBY_BYB,YCY_CYC。那么:
P(YA,YB∣YC)=P(YA∣YC)P(YB∣YC)P(Y_A,Y_B|Y_C)=P(Y_A|Y_C)P(Y_B|Y_C)P(YA,YB∣YC)=P(YA∣YC)P(YB∣YC)
1.1.3 重点再看局部马尔科夫性
成对马尔科夫性,局部马尔科夫性以及全局马尔科夫性是等价的。
v是无向图G中任意一个结点,对应随机变量YvY_vYv。
W是与v有边链接的所有结点,对应随机变量组是YWY_WYW。
O是v,W以外的所有结点,对应随机变量组是YOY_OYO。
那么 P(Yv,YO∣YW)=P(Yv∣YW)P(YO∣YW)P(Y_v,Y_O|Y_W) =P(Y_v|Y_W)P(Y_O|Y_W)P(Yv,YO∣YW)=P(Yv∣YW)P(YO∣YW),说明给定YWY_WYW条件下YvY_vYv和YOY_OYO是条件独立的。也就是说v只与W有关系。
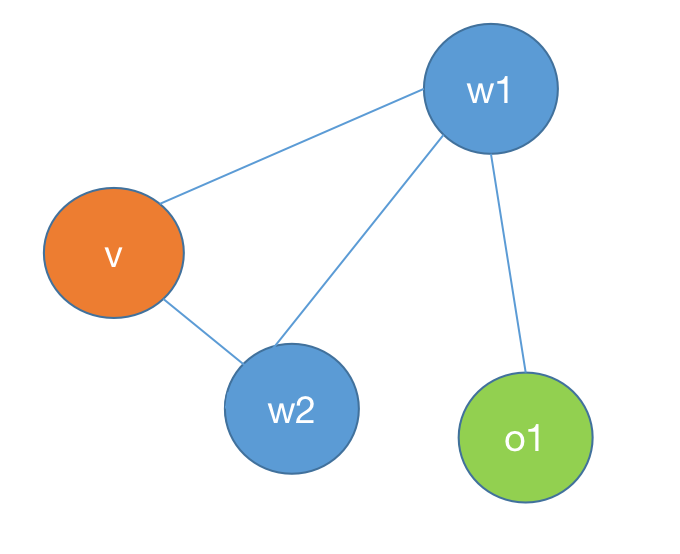
如图所示W表示所有与v相连的点。O表示除v和W之外的所有点。
我们再看P(Yv,YO∣YW)=P(Yv∣YO,YW)P(YO∣YW)P(Y_v,Y_O|Y_W) =P(Y_v|Y_O,Y_W)P(Y_O|Y_W)P(Yv,YO∣YW)=P(Yv∣YO,YW)P(YO∣YW)(根据条件概率公式)
两个公式联合起来得到结论:P(Yv∣YW)=P(Yv∣YO,YW)P(Y_v|Y_W) = P(Y_v|Y_O,Y_W)P(Yv∣YW)=P(Yv∣YO,YW)(记为公式1)
1.2 马尔科夫随机场的因子分解
团:无向图中任意两个结点均有边相连的节点子集。
最⼤团:⽆向图 中的⼀个团,并且不能再加进任何⼀个结点使其成为⼀个更⼤的团。
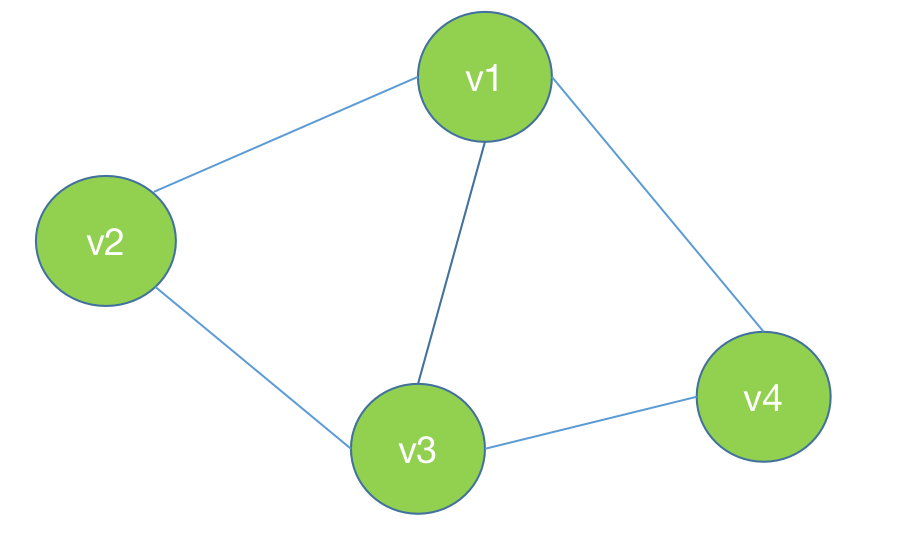
这个图中的最大团是(v1,v2,v3)或者(v1,v3,v4)
概率无向图的联合概率分布P(Y)=1Z∏CΦC(YC)P(Y) = \dfrac{1}{Z}\prod_C \Phi_C(Y_C)P(Y)=Z1∏CΦC(YC)
(概率无向图的联合概率分布就等于所有最大团的一个累乘,所有最大团上势函数的累乘)
其中C是无向图的最大团,YCY_CYC是C的节点对应的随机变量,
势函数ΦC(YC)=exp{−E(YC)}\Phi_C(Y_C)=exp\{-E(Y_C)\}ΦC(YC)=exp{−E(YC)}
Z是规范化因子,是一个全概率分布,Z=∑Y∏CΦC(YC)Z=\sum_Y\prod_C\Phi_C(Y_C)Z=∑Y∏CΦC(YC)
乘积是在无向图所有的最大图上进行的。
势函数会根据模型的不同而不同。
1.3 条件随机场
设X与Y是随机变量,P(Y|X)是在给定X的条件下Y的条件概率分布。如果Y构成一个由无向图G表示的马尔科夫随机场,则称条件概率分布P(Y|X)为条件随机场。
对于任意v,都有P(Yv∣X,Yw,w≠v)=P(Yv∣X,Yw,w−v)P(Y_v|X,Y_w,w\ne v) = P(Y_v|X,Y_w,w-v)P(Yv∣X,Yw,w=v)=P(Yv∣X,Yw,w−v) w-v表示w是与v相连的所有点。也就是说v事件发生的概率只与与它相连的点有关系。
说明:X是Y的条件,X是输入,Y是输出。
这个公式的由来是从公式1对比得到的。增加了条件X。
这个公式可以描述为:任意一个节点v的在与它有边相连的条件下的概率,等于非v条件下的概率。
1.4 线性链条件随机场
再进一步约束:我们用无向图G表示事件Y的概率,Y中包含Y1,Y2,Y3…Yn。这些事件之间具有线性关系。
再假设条件X,X包含X1,X2,X3…Xn。X和Y之间具有线性关系。如下图所示。
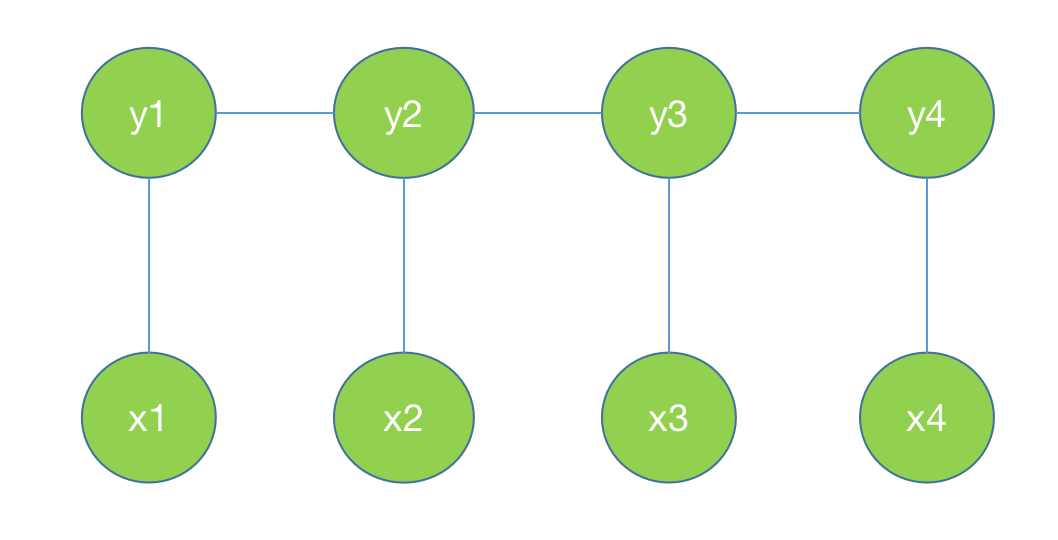
也就是说加上条件Y是具有线性关系的,X和Y具有相同的线性结构。上面的公式可以写为:P(Yi∣X,Y1,Y2...Yi−1,Yi+1,...Yn)=P(Yi∣X,Yi−1,Yi+1)P(Y_i|X,Y_1,Y_2...Y_{i-1},Y_{i+1},...Y_n) = P(Y_i|X,Y_{i-1},Y_{i+1})P(Yi∣X,Y1,Y2...Yi−1,Yi+1,...Yn)=P(Yi∣X,Yi−1,Yi+1)。这个公式称为线性链条件随机场。记为公式2。
与节点i有边相连的节点时候i−1i-1i−1和i+1i+1i+1。
不等于i的节点有:1,2,…i-1,i+1,…n
X是条件
2线性链条件随机场的表示形式
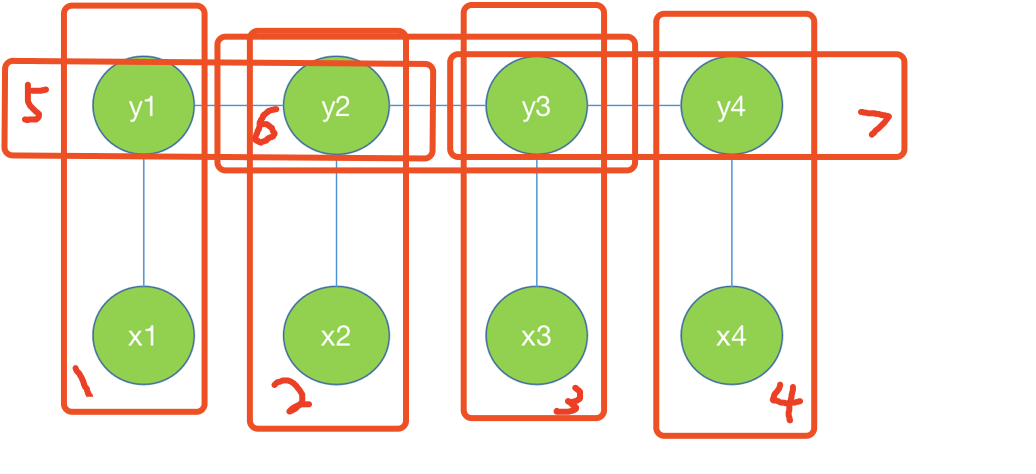
可以看到在图中是有7个最大团。计算P(Y|X)就是所有最大团的势函数的累乘。
2.1 参数化形式
定义了每个节点和每条边的特征函数,用特征函数表示概率。
P(Y)=s1t1s2t2...tn−1snP(Y)=s_1t_1s_2t_2...t_{n-1}s_nP(Y)=s1t1s2t2...tn−1sn
设P(Y|X)为线性链条件随机场,则在随机变量X取值为x的条件下,随机变量Y取值为y的条件概率

其中,

tkt_ktk是定义在边上的特征函数。依赖于当前和前一个位置。
sls_lsl是定义在结点上的特征函数,称为状态特征,依赖于当前位置。
tkt_ktk和sls_lsl值为1或者0。
λk\lambda_kλk和μl\mu_lμl是对应的权值。
Z(x)是规范化因子,求和是在所有可能的输出序列上。
注意:这两句话没理解明白,暂时记录在这里。
sls_lsl的个数应该等于边的个数 x 每个顶点可能的取值集合个数
tkt_ktk个数=边的个数 x(第一个顶点取值个数 x 第二个顶点取值个数)
这是按照上面最大团的定义来确定的。
2.2 简化形式
用fkf_kfk表示边的特征函数和节点的特征函数。
设有K1K_1K1个边的特征函数,有K2K_2K2个节点的特征函数,K=K1+K2K=K_1+K_2K=K1+K2

用wkw_kwk表示边的权重和节点的权重。

则条件随机场表示为:
用向量化表示为:
P(y∣x)=exp(w.F(y,x))Zw(x)P(y|x)=\dfrac{exp(w.F(y,x))}{Z_w(x)}P(y∣x)=Zw(x)exp(w.F(y,x)),其中
Zw(x)=∑yexp(w.F(y,x))Z_w(x) = \sum_y exp(w.F(y,x))Zw(x)=∑yexp(w.F(y,x))
2.3 矩阵形式
引入一个特殊的起点标记y0=starty_0=starty0=start表示开始状态,yn+1=stopy_{n+1}=stopyn+1=stop表示终止状态。定义一个m阶矩阵。
m是yiy_iyi取值的个数。
如果yiy_iyi表示骰子出现的某一面,那么m=6;如果yiy_iyi表示一枚硬件哪面朝上,那么m=2。
P(y∣x)=1Zw(x)∏i=1n+1Mi(yi−1,yi∣x)P(y|x) = \dfrac{1}{Z_w(x)}\prod^{n+1}_{i=1}M_i(y_{i-1},y_i|x)P(y∣x)=Zw(x)1∏i=1n+1Mi(yi−1,yi∣x),
其中Zw(x)=(M1(x),M2(x),...Mn+1(x))start,stopZ_w(x)=(M_1(x),M_2(x),...M_{n+1}(x))_{start,stop}Zw(x)=(M1(x),M2(x),...Mn+1(x))start,stop
矩阵最关注矩阵的形状。
3 条件随机场的概率计算
条件随机场的概率计算问题是:计算条件概率P(Yi=yi∣x)P(Y_i=y_i|x)P(Yi=yi∣x),P(Yi−1=yi−1,Yi=yi∣x)P(Y_{i-1}=y_{i-1},Y_{i}=y_i|x)P(Yi−1=yi−1,Yi=yi∣x) 以及它们的希望。
前向计算
后向计算
计算特征函数fk(x,y)f_k(x,y)fk(x,y)关于条件分布P(Y|X)的数学期望:
计算特征函数fk(x,y)f_k(x,y)fk(x,y)关于联合分布P(X,Y)的数学期望:
这里的结果是中间量
4 条件随机场的学习算法
4.1 最大熵模型
4.1.1最大熵模型定义
模型就是一个从输入到输出的一个映射,可以是一个f(x),也可以是一个P(y|x)。当在所有条件都满足的时候,这个函数不唯一的时候,就使用最大熵策略来选择模型。所以最大熵模型是一种选择策略,是一种世界观。
熵最大=变量几乎可以均匀分布
假设分类模型是条件概率分布P(Y|X)。给定条件X,以条件概率P(Y|X)输出Y。
给定训练集,可以确定联合分布P(X,Y)的经验分布和边缘分布P(X)的经验分布,分别以P^(X,Y)\hat{P}(X,Y)P^(X,Y)和P^(X)\hat{P}(X)P^(X)。这里
P^(X=x,Y=y)=v(X=x,Y=y)N\hat{P}(X=x,Y=y)=\dfrac{v(X=x,Y=y)}{N}P^(X=x,Y=y)=Nv(X=x,Y=y)
P^(X=x)=v(X=x)N\hat{P}(X=x)=\dfrac{v(X=x)}{N}P^(X=x)=Nv(X=x)
其中,v(X=x,Y=y)v(X=x,Y=y)v(X=x,Y=y)表示训练样本中(x,y)出现的频率,v(X=x)v(X=x)v(X=x)表示训练样本中x出现的频率。N表示样本容量。
特征函数f(x,y)描述输入x和y之间的某一事实。

特征函数f(x,y)关于经验分布P^(X,Y)\hat{P}(X,Y)P^(X,Y)的期望:
EP^(f)=∑x,yP^(x,y)f(x,y)=∑x,yP^(x)P^(y∣x)f(x,y)E_{\hat{P}}(f)=\sum_{x,y}\hat{P}(x,y)f(x,y)=\sum_{x,y}\hat{P}(x)\hat{P}(y|x)f(x,y)EP^(f)=∑x,yP^(x,y)f(x,y)=∑x,yP^(x)P^(y∣x)f(x,y)(公式1)
特征函数f(x,y)关于模型P(Y|X)与经验分布P^(X)\hat{P}(X)P^(X)的期望
EP(f)=∑x,yP^(x)P(y∣x)f(x,y)E_{P}(f)=\sum_{x,y}\hat{P}(x)P(y|x)f(x,y)EP(f)=∑x,yP^(x)P(y∣x)f(x,y)(公式2)
假设:特征函数f(x,y)关于经验分布P^(X,Y)\hat{P}(X,Y)P^(X,Y)的期望应该等于关于模型P(Y|X)与经验分布P^(X)\hat{P}(X)P^(X)的期望。那么P(y∣x)=P^(y∣x)P(y|x)=\hat{P}(y|x)P(y∣x)=P^(y∣x)(对比公式1和公式2),也就是说数据集的条件概率分布可以反映出模型的条件概率分布。这就可以达到我们的目的了。
最⼤熵模型:假设满⾜所有约束条件的模型集合为

定义在条件概率分布P(Y|X)上的条件熵为:
H(P)=−∑x,yP^(x)P(y∣x)logP(y∣x)H(P)=-\sum_{x,y}\hat{P}(x)P(y|x)logP(y|x)H(P)=−∑x,yP^(x)P(y∣x)logP(y∣x)
4.1.2 最大熵模型学习
优化函数:
拉格朗日乘子法
1 构建拉格朗日乘子

2 求min
3 求max
最⼤熵模型的极⼤似然估计等价于对偶函数极⼤化。
对偶函数如下:
4 模型学习:迭代尺度法

这部分的学习跳过了。直接用结论。
4.2 条件随机场的学习算法
由训练数集,计算经验概率分布P^(X,Y)\hat{P}(X,Y)P^(X,Y)。
目标函数是对数似然函数。计算其中的参数W
5 条件随机场的预测算法
给定条件随机场P(Y|X)和输入观测序列x,求条件概率最大的标记序列y*。
维特比算法。
公式太多,没有记录。










)



:restful的put)


:jstl的jar包的下载)

