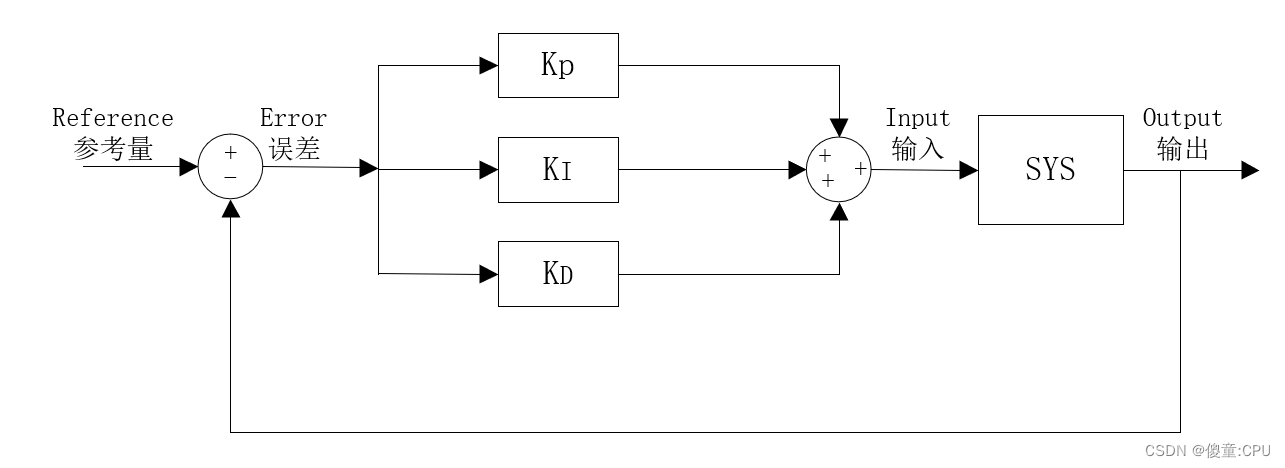
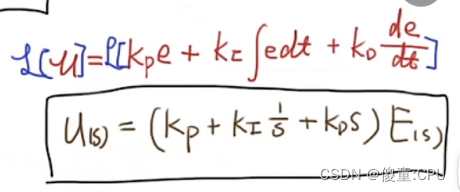
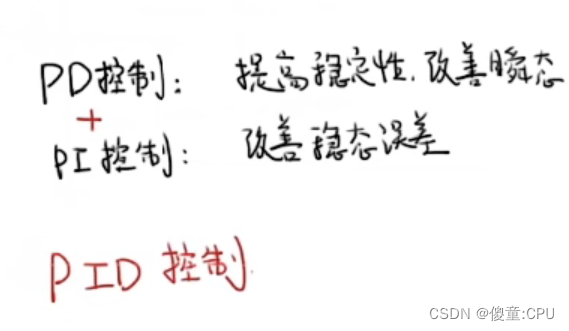
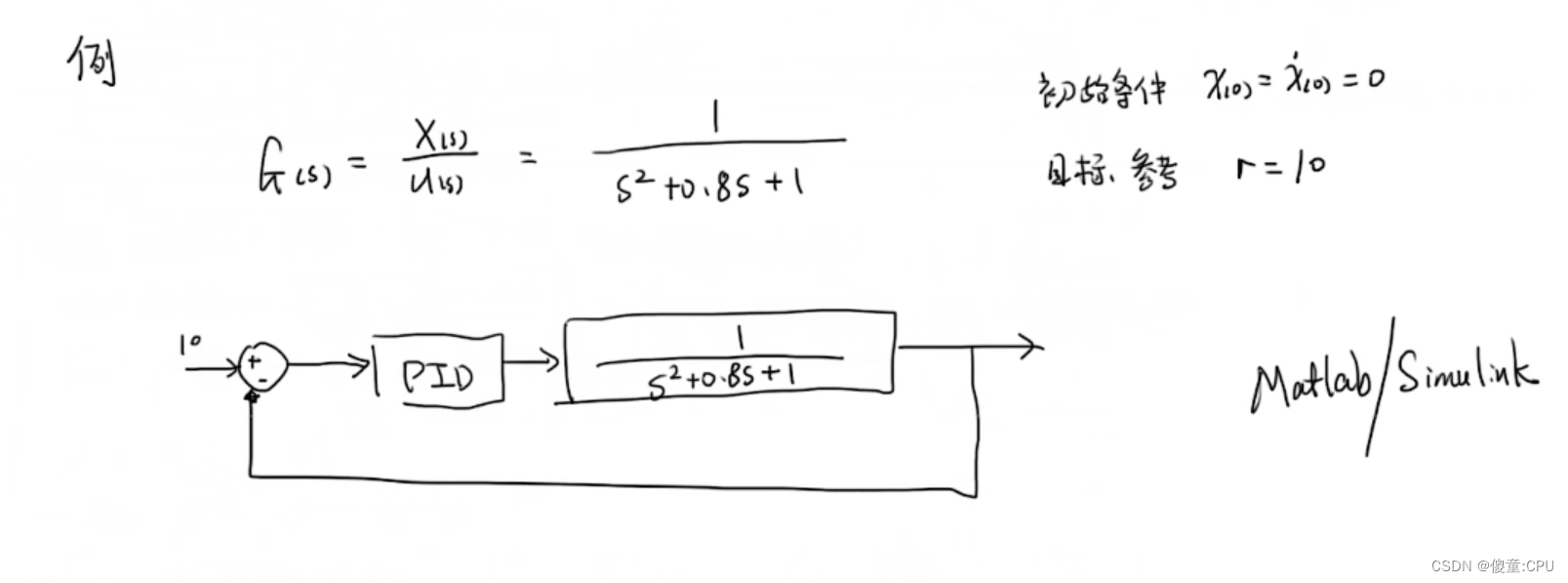
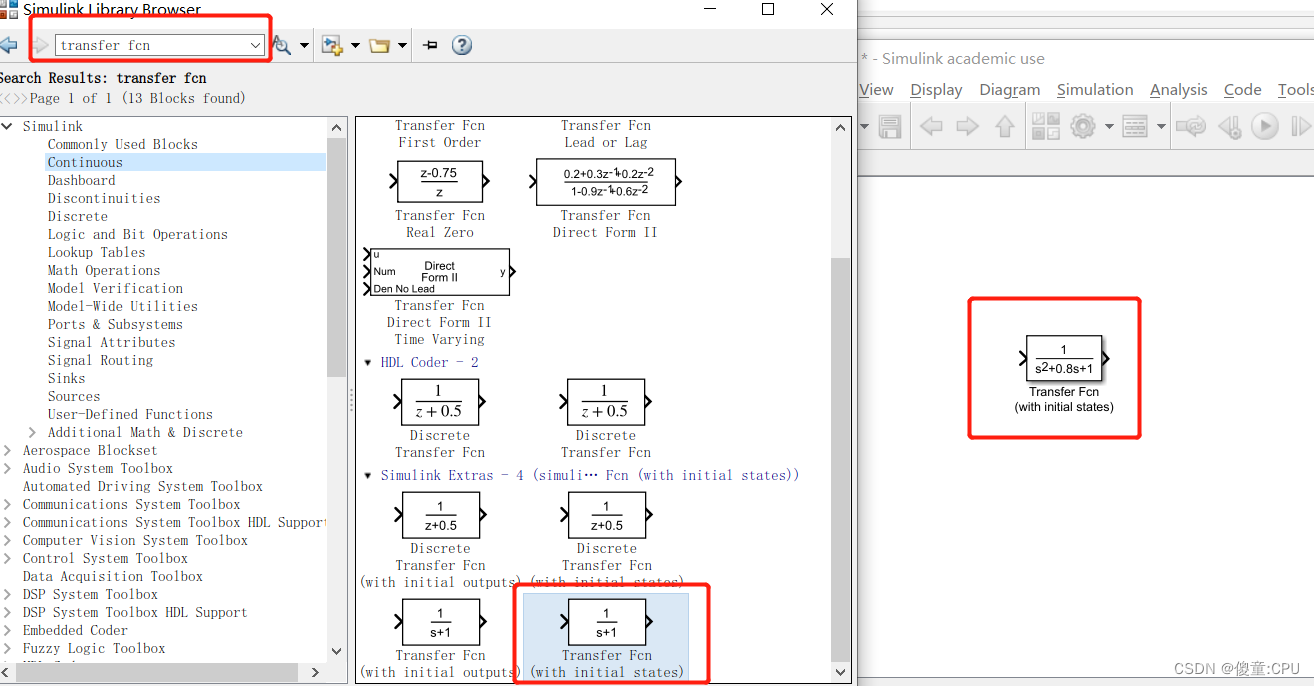
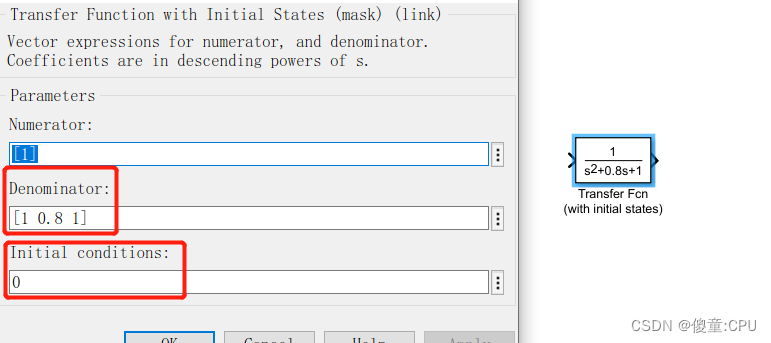
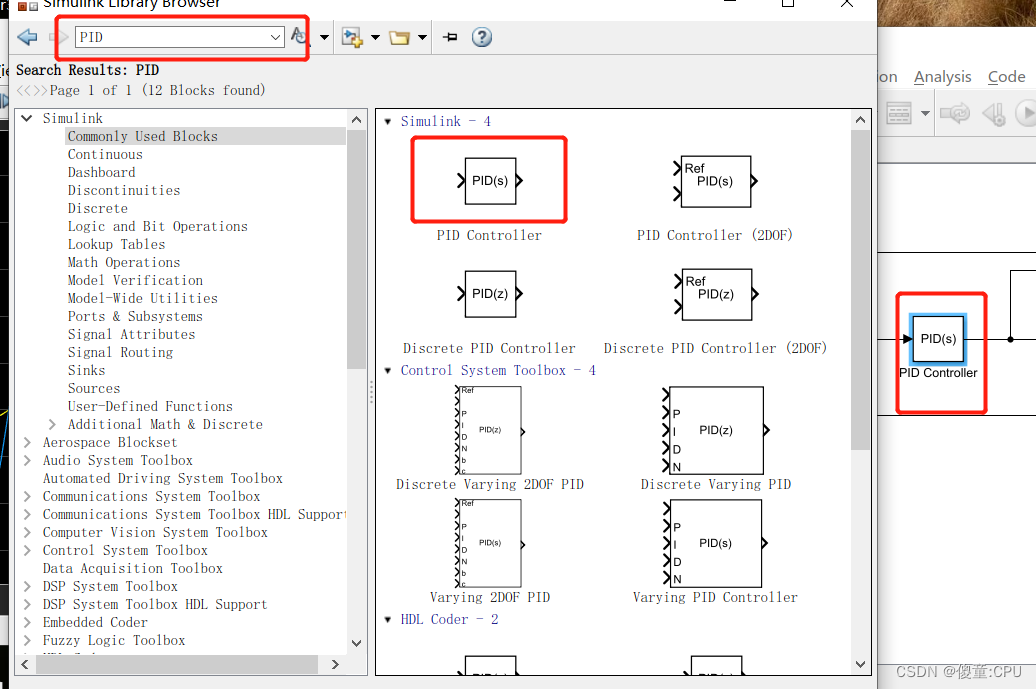
PID控制器_Matlab/Simulink仿真
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mzph.cn/news/242819.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

银行停贷、涨息、排队,8月不贷只能等明年
这几天做贷款的朋友圈被这种消息刷屏了没?据深圳商报报道,目前深圳一些大银行已经出现了贷款资金余额不足的情况,甚至有的银行已经停止信用贷款的发放;业内人士认为,信贷额度紧张局面估计持续到年底。除了深圳…

如何快速把借呗额度提高到10万?
借呗是一个很好的贷款工具,快,简,省等优点深得广大网友的喜爱。但是借呗虽然好用,却受限于额度,很多人的额度都是在3万以内,能超过10万的毕竟是少数人,看到别人几十万的额度,你是不是…

Simulink模糊控制入门
Simulink模糊控制入门
第一步:在命令窗口输入 fuzzy 在命令窗口输入 :doc Implement Fuzzy PID Controller in Simulink Using Lookup Table可以找到模糊控制说明的文档 另一种设置隶属函数的方式(建议):先删除所有的FMs在添加7个就行

sum of two integers
https://leetcode.com/problems/sum-of-two-integers/
Calculate the sum of two integers a and b, but you are not allowed to use the operator and -.
Example: Given a 1 and b 2, return 3.
注释,这个题目有意思,学过FPGA的人都知道最基本…

监管升级,央行变相加息,贷款难还在继续
近段看到很多有贷款需求的朋友已经排队很久了,但是贷款还是没有着落,而还在观望的朋友,对不起,可能贷款没你的份了,因为监管正在升级,说白了就是央行变相加息,让贷款更难。银行同业存单纳入MPA考…


网络技术等级考试知识点
第一章 网络系统结构与设计的基本原则第二章 中小型网络系统总体规划与设计方法第三章 IP地址规划设计技术第四章 路由设计基础第五章 局域网技术第六章 交换机及其配置第七章 路由器及其配置第八章 无线局域网设备安装与调试第九章 计算机网络新型服务系统的安装与配置第十章 …



Maximum Depth of Binary Tree
https://leetcode.com/problems/maximum-depth-of-binary-tree/
Given a binary tree, find its maximum depth.
The maximum depth is the number of nodes along the longest path from the root node down to the farthest leaf node.
求给定二叉树的最大的深度ÿ…

MATLAB工具常用函数
简介MATLAB 是一种用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。使用 MATLAB,可以较使用传统的编程语言(如 C、C 和 Fortran)更快地解决技术计算问题。 应用范围:包括信号和图像处理、通讯、控…

MATLAB求音频信号特征的自定义函数.md
分帧和分窗处理:对信号x加窗分帧处理 1234567wlen50; % 帧长 inc18; % 帧移 winhanning(wlen); % 窗函数 fnfloor(((N-wlen)/inc))1; % 计算帧数 time(0:N-1)/F…

Invert Binary Tree
https://leetcode.com/problems/invert-binary-tree/
Invert a binary tree.
4 / \ 2 7 / \ / \ 1 3 6 9 to 4 / \ 7 2 / \ / \ 9 6 3 1
给出一棵二叉树,求这棵二叉树的镜像。
搬运九章上的实现 http://www.jiuzhang.com/solutions/invert-binary-tre…


这些人,建议你不要去贷款了
贷款是好事,但是贷款还不上就不是好事了,在实际的贷款中,有很多人贷款都是没有目的性,纯粹是为了获取贷款而贷款,如果你是下面这些人,建议不要去贷款了。第一种人,贷款投机的人所谓投机就是为了…


)
空间谱专题02:波束形成(Beamforming)
作者:桂。 时间:2017-08-22 10:56:45 链接:http://www.cnblogs.com/xingshansi/p/7410846.html 前言 本文主要记录常见的波束形成问题,可以说空间谱估计是波束形成基础上发展而来,在系统论述空间谱之前,有…


网上看的几点人生建议
在博客上看到一篇关于给二十几岁人的人生建议,觉得颇有道理,写一下关于这个感想,提醒现在和以后的你和自己。 人生路上,确实是一切都是未知的,你不知道你下一刻,面临的会是什么,我们无法预知未…