动物表现出多种多样的形态和大小,通常与它们所处的介质有关。它们可以游泳、爬行、行走、奔跑、跳跃、飞行和滑翔等。进化使它们复杂而有效地结合不同类型的运动来逃避捕食者、交配或寻找食物 。作为科学家去研究如此丰富的动物运动,可以了解自然界的一些基本运作。
同时救灾场景通常需要救援人员冒着生命危险,在复杂、非结构化的地形、危险碎片和瓦砾上跋涉。如果开发能够模仿某些动物的形态和稳健运动的机器人,就可以在许多类似任务中取代或增强人类和救援犬团队。
鉴于动物必须超越自然障碍并使其运动适应周围环境的能力,某些动物居住的自然环境为测试和开发仿生机器人的这种能力提供了一个非常有用的场景。原则上,自然场景提供了一种途径,可以全面测试生物机器人再现形态和功能的准确性。这将使生物机器人能够更好地设计和准备现实世界中的任务,在非洲测试野外机器人被证明是这个方向的一个有见地的机会。此外,在生物的自然环境中测试这些机器人也开辟了新的潜在研究途径,例如研究动物与机器人的相互作用、行为学、进化和生物力学。

在机器人领域,现场鲁棒性和可靠性通常需要在设计、控制和成本方面格外复杂。然而,一些相对简单但成功的设计表明,情况并非总是如此。依靠简单的制造技术和现成的组件也可以在现场取得令人满意的结果。使用常用的材料可以快速迭代原型以进行跨学科研究,并减少最终的维护成本和时间。正如我们最终在非洲意识到的那样,这也允许在现场使用最少的工具和材料进行快速维修,这对于时间紧迫的现场应用(如灾难响应、环境监测或行星探索)通常是必不可少的。
因此,我们在推理和设计权衡方面面临的主要问题如下:
- 仿生机器人设计。机器人仿生设计过程需要有多彻底才能实现物理和视觉上的相似性,同时保持在其自然环境中稳健地再现其相关动物运动的能力?
- 快速机器人制造。经济实惠、快速的机器人原型制作和现成的组件能否为生物机器人提供足够的运动功能和可靠性,使其在自然环境的恶劣条件下能够承受?
- 在自然栖息地进行测试。如何利用生物机器人与具有挑战性的自然环境进行物理交互的经验教训,随后升级其应对不可预测的复杂场景的能力?
我们与 BBC 和 Spy in the Wild 制片人的合作是一个独特的机会,可以探索这些问题并设计 Krock 机器人平台(下图)。
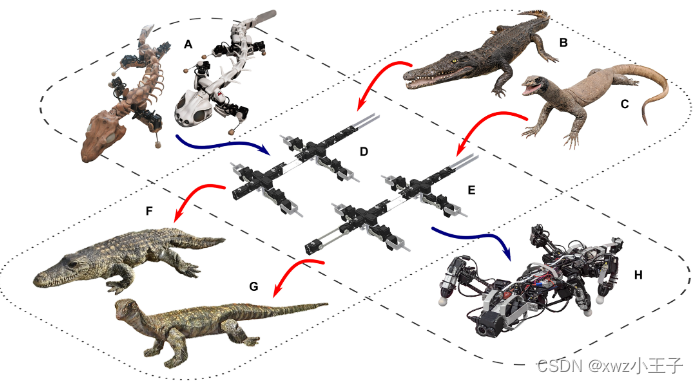
这部纪录片使用了一系列动物的电子动画复制品来拍摄附近的动物,并产生人类摄像师或间谍相机不会发生的互动行为。纪录片工程师复制了一系列动物,从猫鼬、猴子到企鹅。这些电子“间谍生物”中的大多数都能够在保持原位(即没有运动)的情况下移动四肢。对我们机器人的一个特殊要求是能够像生物机器人一样进行机动。
据我们所知,我们的机器人与为同一部纪录片创作的大多数其他间谍生物不同,因为它们的运动能力和实际机器人技术的使用,如反向运动学控制器,在保持平衡的同时产生正确的运动。该平台是第一个设计受动物影响的两栖机器人;具有简单、低成本、开源的硬件构建;其运动在相关动物的自然栖息地进行了广泛的测试。Krock的第一个版本体现在两个略有不同的机器人中,它们类似于真正的鳄鱼和巨蜥的形态,分别称为SpyCroc和SpyLizard。我们在尼罗河沿岸测试了这些机器人,为期 2 周。基于在非洲的经验,我们还开发了该平台的下一个版本,称为Krock-2,专注于在灾难响应任务中的潜在用途。
总之,我们根据本文介绍的工作提出了新的科学途径。动物运动的综合研究需要一个物理平台来捕捉动物与环境相互作用的真实物理世界。凭借我们在这项研究中的(开源)贡献,我们希望使这些平台更实惠,同时保持足够的精确度以用于科学目的。当然,这些机器人只是真实动物身体的近似值,可以通过多种方式进行改进(例如,通过包括类似肌肉的驱动、更多的自由度和/或添加触觉皮肤)。尽管如此,这些开源平台及其未来的改进为生物学家和机器人专家铺平了道路,让他们共同努力在各种研究课题中使用生物信息机器人。例如,设计旨在重建动物生物力学数据的简单机器人机制将使更广泛的比较形态学研究成为可能。与仿真不同,这些机器人平台允许测试与真实物理场的交互,这对于难以模拟的环境(有水、泥浆和颗粒介质等)的运动特别有用。特别是,对于动物进化研究,生物信息机器人可用于重建灭绝动物的运动,对于神经科学,我们最新的类似七鳃鳗的游泳机器人AgnathaX有助于阐明局部感觉反馈在运动产生中的作用。最后,类似动物的机器人,类似于SpyCroc和SpyMonitor,可以为动物行为研究带来新的机会,例如,研究动物与机器人的物理交互。 我们工作贡献是吸取的经验教训,将我们有限的、低迭代的机器人动物模仿设计置于具有挑战性的栖息地,大自然在数百万年的时间里训练了真实动物的运动能力和行为。最终,我们的工作将增加人类对其他生物的理解,同时尝试改进人类解决问题的工具。









)
)






骑行樱花谷)
)
)