论文PDF
abstract
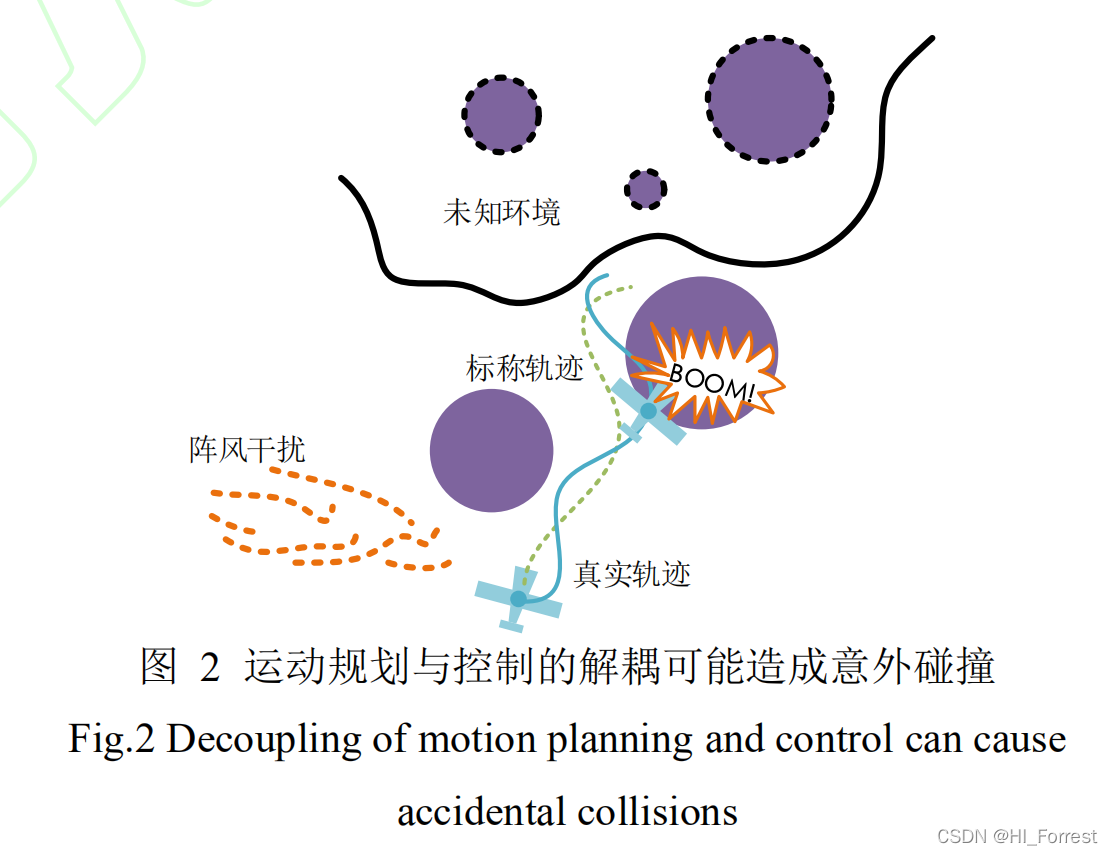
随着应用场景的日益复杂,机器人对旨在生成无碰撞路径(轨迹)的自主运动规划技术的需求也变得更加迫 切。虽然目前已产生了大量适应于不同场景的规划算法,但如何妥善地对现有成果进行归类,并分析不同方法间的优劣异同仍是需要深入思考的问题。本文以此为切入点,首先 阐释运动规划的基本内涵及经典算法的关键步骤;其次针对实时性与解路径(轨迹)品质间的矛盾,以是否考虑微分约束为标准,有层次地总结了现有的算法加速策略;最后面向不 确定性(即传感器不确定性、未来状态不确定性和环境不确定性)下的规划和智能规划提出的新需求,对运动规划领域的最新成果和发展方向进行了评述,以期为后续研究提供有益的参考。









)
)








