目录
一、pod简介:
1. Pod基础概念:
2. Kubrenetes集群中Pod的两种使用方式:
3. pod资源中包含的容器:
4. pause容器的两个核心功能:
5. Kubernetes中使用pause容器概念的用意:
二、pod的分类:
1. 自主式Pod :
2. 控制器管理的Pod:
3. 静态Pod:
3.1 配置静态pod详解:
3.1.1查看kubelet配置文件:
3.1.2 静态Pod的环境变量配置:
3.1.3 在静态Pod文件的管理目录下准备文件:
三、Pod容器的分类:
1. 基础容器:
2. 初始化容器(initcontainers):
2.1 Init 容器与普通的区别:
2.2 Init 的容器作用:
3. 应用容器(Maincontainer):
4. 特别说明:
四、镜像拉取策略(imagePullPolicy):
五、重启策略(restartPolicy):
示例:
一、pod简介:
1. Pod基础概念:
Pod是kubernetes中最小的资源管理组件,Pod也是最小化运行容器化应用的资源对象。一个Pod代表着集群中运行的一个进程。kubernetes中其他大多数组件都是围绕着Pod来进行支撑和扩展Pod功能的,例如,用于管理Pod运行的StatefulSet和Deployment等控制器对象,用于暴露Pod应用的Service和Ingress对象,为Pod提供存储的PersistentVolume存储资源对象等。
2. Kubrenetes集群中Pod的两种使用方式:
- 一个Pod中运行一个容器。“每个Pod中一个容器”的模式是最常见的用法;在这种使用方式中,你可以把Pod想象成是单个容器的封装,kuberentes管理的是Pod而不是直接管理容器。
- 在一个Pod中同时运行多个容器。一个Pod中也可以同时封装几个需要紧密耦合互相协作的容器,它们之间共享资源。这些在同一个Pod中的容器可以互相协作成为一个service单位,比如一个容器共享文件,另一个“sidecar”容器来更新这些文件。Pod将这些容器的存储资源作为一个实体来管理。
一个Pod下的容器必须运行于同一节点上。现代容器技术建议一个容器只运行一个进程,该进程在容器中PID命名空间中的进程号为1,可直接接收并处理信号,进程终止时容器生命周期也就结束了。若想在容器内运行多个进程,需要有一个类似Linux操作系统init进程的管控类进程,以树状结构完成多进程的生命周期管理。运行于各自容器内的进程无法直接完成网络通信,这是由于容器间的隔离机制导致,k8s中的Pod资源抽象正是解决此类问题,
Pod对象是一组容器的集合,这些容器共享NET、MNT、UTS及IPC命名空间,因此具有相同的域名、主机名和网络接口,并可通过IPC直接通信。
3. pod资源中包含的容器:
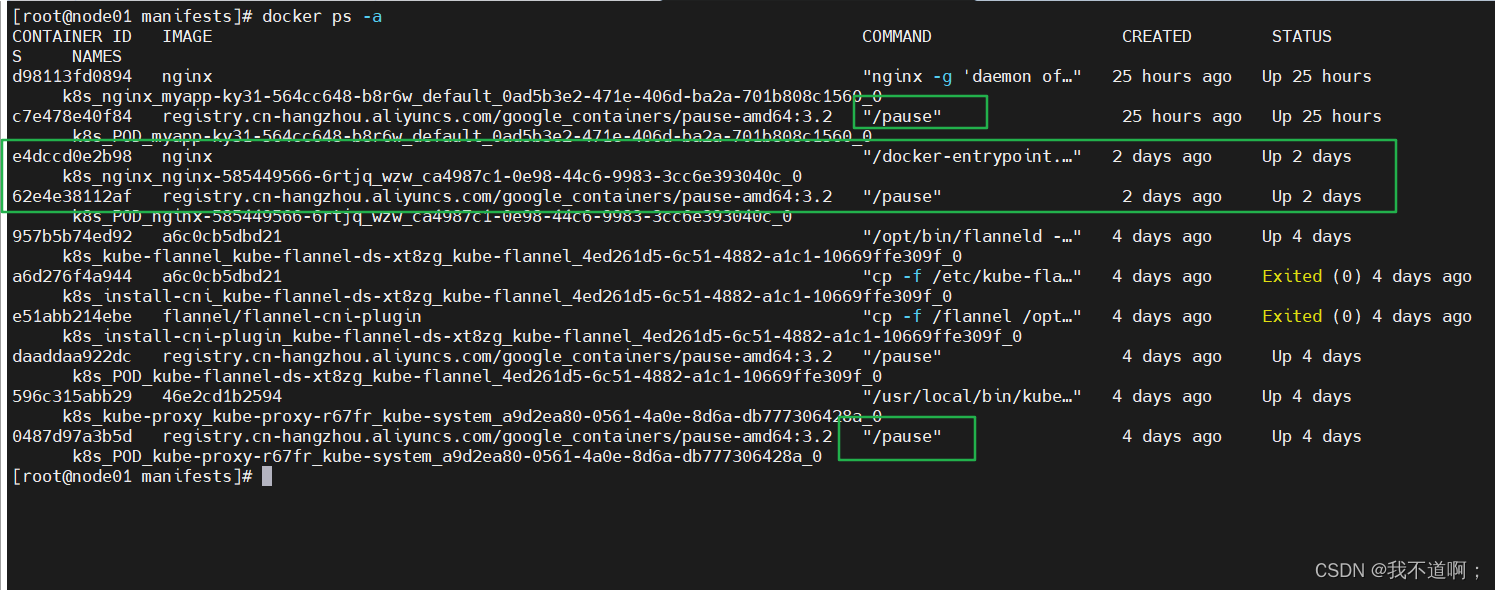
- 1个pause容器(基础容器/父容器/根容器)
- 1个或者多个应用容器(业务容器)
Pod资源中针对各容器提供网络命名空间等共享机制的是底层基础容器pause,基础容器(也可称为父容器)pause就是为了管理Pod容器间的共享操作,这个父容器需要能够准确地知道如何去创建共享运行环境的容器,还能管理这些容器的生命周期。
为了实现这个父容器的构想,kubernetes中,用pause容器来作为一个Pod中所有容器的父容器。
pause容器使得Pod中的所有容器可以共享两种资源:网络和存储。
- 网络:
每个Pod都会被分配一个唯一的IP地址。Pod中的所有容器共享网络空间,包括IP地址和端口。Pod内部的容器可以使用localhost互相通信。Pod中的容器与外界通信时,必须分配共享网络资源(例如使用宿主机的端口映射)。
- 存储:
Pod可以指定多个共享的Volume。Pod中的所有容器都可以访问共享的Volume。Volume也可以用来持久化Pod中的存储资源,以防容器重启后文件丢失。
4. pause容器的两个核心功能:
- 它提供整个Pod的Linux命名空间的基础。
- 启用PID命名空间,它在每个Pod中都作为PID为1进程(init进程),并回收僵尸进程。
5. Kubernetes中使用pause容器概念的用意:
- 原因一:在一组容器作为一个单元的情况下,难以对整体的容器简单地进行判断及有效地进行行动。比如,一个容器死亡了,此时是算整体挂了么?那么引入与业务无关的Pause容器作为Pod的基础容器,以它的状态代表着整个容器组的状态,这样就可以解决该问题。
- 原因二:Pod里的多个应用容器共享Pause容器的IP,共享Pause容器挂载的Volume,这样简化了应用容器之间的通信问题,也解决了容器之间的文件共享问题。
二、pod的分类:
1. 自主式Pod :
这种Pod本身是不能自我修复的,当Pod被创建后(不论是由你直接创建还是被其他Controller),都会被Kuberentes调度到集群的Node上。直到Pod的进程终止、被删掉、因为缺少资源而被驱逐、或者Node故障之前这个Pod都会一直保持在那个Node上。Pod不会自愈。如果Pod运行的Node故障,或者是调度器本身故障,这个Pod就会被删除。同样的,如果Pod所在Node缺少资源或者Pod处于维护状态,Pod也会被驱逐。
2. 控制器管理的Pod:
Kubernetes使用更高级的称为Controller的抽象层,来管理Pod实例。Controller可以创建和管理多个Pod,提供副本管理、滚动升级和集群级别的自愈能力。例如,如果一个Node故障,Controller就能自动将该节点上的Pod调度到其他健康的Node上。虽然可以直接使用Pod,但是在Kubernetes中通常是使用Controller来管理Pod的。
3. 静态Pod:
静态 Pod 直接由特定节点上的 kubelet 进程来管理,不通过 master 节点上的 apiserver 。无法与控制器 Deployment 或者 DaemonSet 进行关联,它由 kubelet 进程自己来监控,当 pod 崩溃时重启该 pod , kubelete 也无法对他们进行健康检查。静态 pod 始终绑定在某一个 kubelet ,并且始终运行在同一个节点上。 kubelet 会自动为每一个静态 pod 在 Kubernetes 的 apiserver 上创建一个镜像 Pod(Mirror Pod),因此我们可以在 apiserver 中查询到该 pod,但是不能通过 apiserver 进行控制(例如不能删除)。
3.1 配置静态pod详解:
3.1.1查看kubelet配置文件:
kubelet配置文件 /var/lib/kubelet/config.yaml
cat /var/lib/kubelet/config.yaml | grep staticPodPath
staticPodPath: /etc/kubernetes/manifests
##这里看到的就是创建静态pod的目录可以直接在此目录编写yaml文件,kubectl会自己创建静态pod
3.1.2 静态Pod的环境变量配置:
systemctl status kubelet
/usr/lib/systemd/system/kubelet.service.d└─10-kubeadm.confvim /usr/lib/systemd/system/kubelet.service.d/10-kubeadm.conf
Environment="KUBELET_SYSTEM_PODS_ARGS=--pod-manifest-path=/etc/kubernetes/manifests --allowprivileged=true"systemctl daemon-reload
systemctl restart kubelet
3.1.3 在静态Pod文件的管理目录下准备文件:
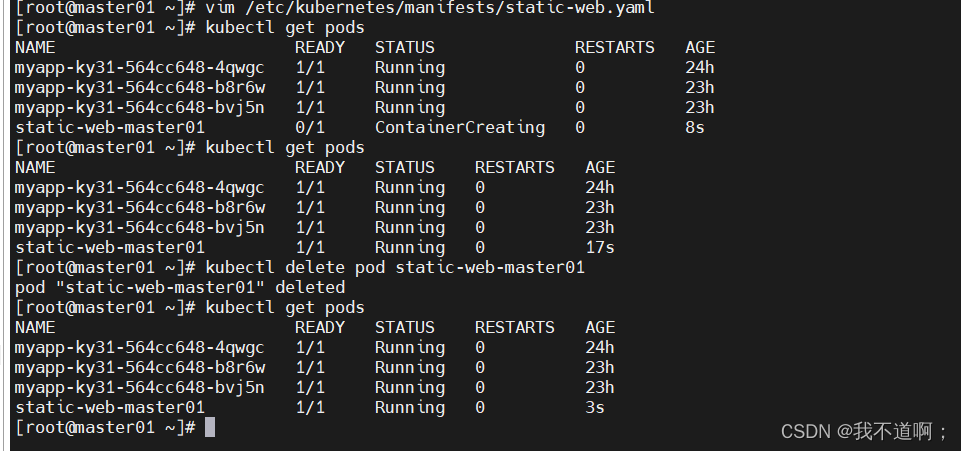
vim /etc/kubernetes/manifests/static-web.yaml
apiVersion: v1
kind: Pod
metadata:name: static-weblabels:app: static
spec:containers:- name: webimage: nginxports:- name: webcontainerPort: 80- 运行中的 kubelet 周期扫描配置的目录下文件的变化,当这个目录中有文件出现或消失时创建或删除 pods。
- 在 Master 节点同样也可以看到该 Pod,如果执行 kubectl delete pod static-web-master01 命令删除该 Pod 发现,并不能删除。
三、Pod容器的分类:
1. 基础容器:
维护整个 Pod 网络和存储空间
启动一个Pod时,k8s会自动启动一个基础容器

每次创建 Pod 时候就会创建,运行的每一个Pod都有一个 pause-amd64 的基础容器自动会运行,对于用户是透明的
2. 初始化容器(initcontainers):
Init容器必须在应用程序容器启动之前运行完成,而应用程序容器是并行运行的,所以Init容器能够提供了一种简单的阻塞或延迟应用容器的启动的方法。
2.1 Init 容器与普通的区别:
- Init 容器总是运行到成功完成为止
- 每个 Init 容器都必须在下一个 Init 容器启动之前成功完成启动和退出
如果 Pod 的 Init 容器失败,k8s 会不断地重启该 Pod,直到 Init 容器成功为止。然而,如果 Pod 对应的重启策略(restartPolicy)为 Never,它不会重新启动。
2.2 Init 的容器作用:
- Init 容器可以包含一些安装过程中应用容器中不存在的实用工具或个性化代码。例如,没有必要仅为了在安装过程中使用类似 sed、 awk、 python 或 dig 这样的工具而去FROM 一个镜像来生成一个新的镜像。
- Init 容器可以安全地运行这些工具,避免这些工具导致应用镜像的安全性降低。
- 应用镜像的创建者和部署者可以各自独立工作,而没有必要联合构建一个单独的应用镜像。
- Init 容器能以不同于Pod内应用容器的文件系统视图运行。因此,Init容器可具有访问 Secrets 的权限,而应用容器不能够访问。
- 由于 Init 容器必须在应用容器启动之前运行完成,因此 Init 容器提供了一种机制来阻塞或延迟应用容器的启动,直到满足了一组先决条件。一旦前置条件满足,Pod内的所有的应用容器会并行启动。
3. 应用容器(Maincontainer):
平时使用的应用容器 特点:并行启动
4. 特别说明:
- 在Pod启动过程中,Init容器会按顺序在网络和数据卷初始化之后启动。每个容器必须在下一个容器启动之前成功退出。
- 如果由于运行时或失败退出,将导致容器启动失败,它会根据Pod的restartPolicy指定的策略进行重试。然而,如果Pod的restartPolicy设置为Always,Init容器失败时会使用RestartPolicy策略。
- 在所有的Init容器没有成功之前,Pod将不会变成Ready状态。Init容器的端口将不会在Service中进行聚集。正在初始化中的Pod处于Pending状态,但应该会将Initializing状态设置为true。
- 如果Pod重启,所有Init容器必须重新执行。
- 对Init容器spec的修改被限制在容器image字段,修改其他字段都不会生效。更改Init容器的image字段,等价于重启该Pod。
- Init容器具有应用容器的所有字段。除了readinessProbe,因为Init容器无法定义不同于完成(completion)的就绪(readiness)之外的其他状态。这会在验证过程中强制执行。
- 在Pod中的每个app和Init容器的名称必须唯一;与任何其它容器共享同一个名称,会在验证时抛出错误。
四、镜像拉取策略(imagePullPolicy):
Pod 的核心是运行容器,必须指定容器引擎,比如 Docker,启动容器时,需要拉取镜像,k8s 的镜像拉取策略可以由用户指定:
- IfNotPresent:在镜像已经存在的情况下,kubelet 将不再去拉取镜像,仅当本地缺失时才从仓库中拉取,默认的镜像拉取策略
- Always:每次创建 Pod 都会重新拉取一次镜像;
- Never:Pod 不会主动拉取这个镜像,仅使用本地镜像。
注意:对于标签为“:latest”的镜像文件,其默认的镜像获取策略即为“Always”;而对于其他标签的镜像,其默认策略则为“IfNotPresent”。
五、重启策略(restartPolicy):
- Always:当容器终止退出后,总是重启容器,默认策略
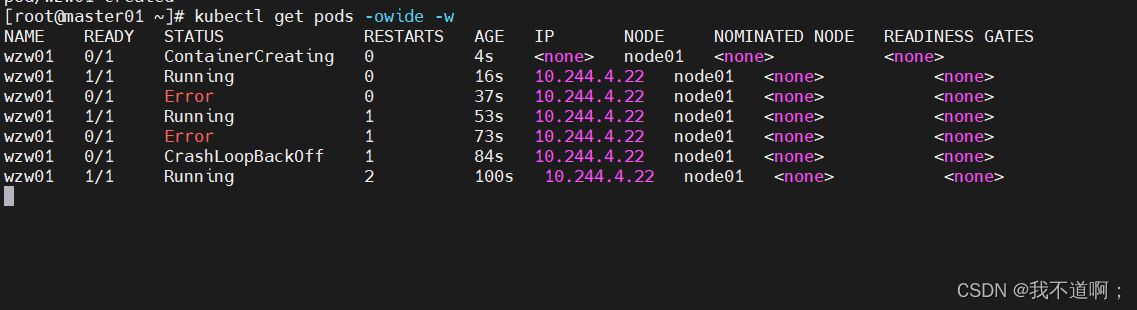
- OnFailure:当容器异常退出(退出状态码非0)时,重启容器;正常退出则不重启容器
- Never:当容器终止退出,从不重启容器。
注意:K8S 中不支持重启 Pod 资源,只有删除重建。
在用 yaml 方式创建 Deployment 和 StatefulSet 类型时,restartPolicy 只能是 Always,kubectl run 创建 Pod 可以选择 Always,OnFailure,Never 三种策略
示例:
apiVersion: v1
kind: Pod
metadata:name: wzw01
spec:containers:- image: busyboxname: busybox01ports:- containerPort: 80args:- /bin/sh- -c- sleep 20; exit 2restartPolicy: Nerver

apiVersion: v1
kind: Pod
metadata:name: wzw01
spec:containers:- image: busyboxname: busybox01ports:- containerPort: 80args:- /bin/sh- -c- sleep 20; exit 2restartPolicy: OnFailure


、AUPR(AUC-PR))








![yolov8系列[六]-项目实战-yolov8模型部署android](http://pic.xiahunao.cn/yolov8系列[六]-项目实战-yolov8模型部署android)







