目录
💥1 概述
📚2 运行结果
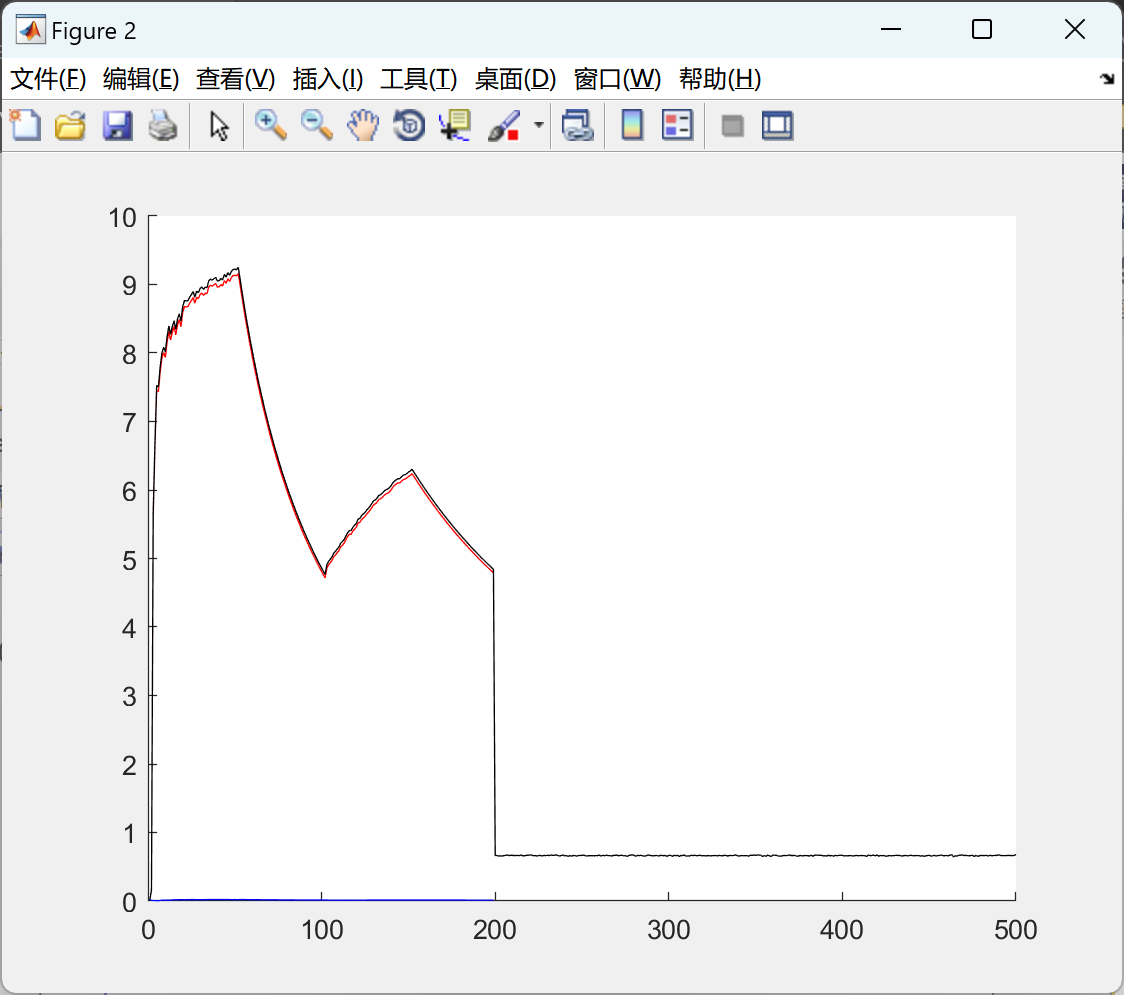
2.1 算例1
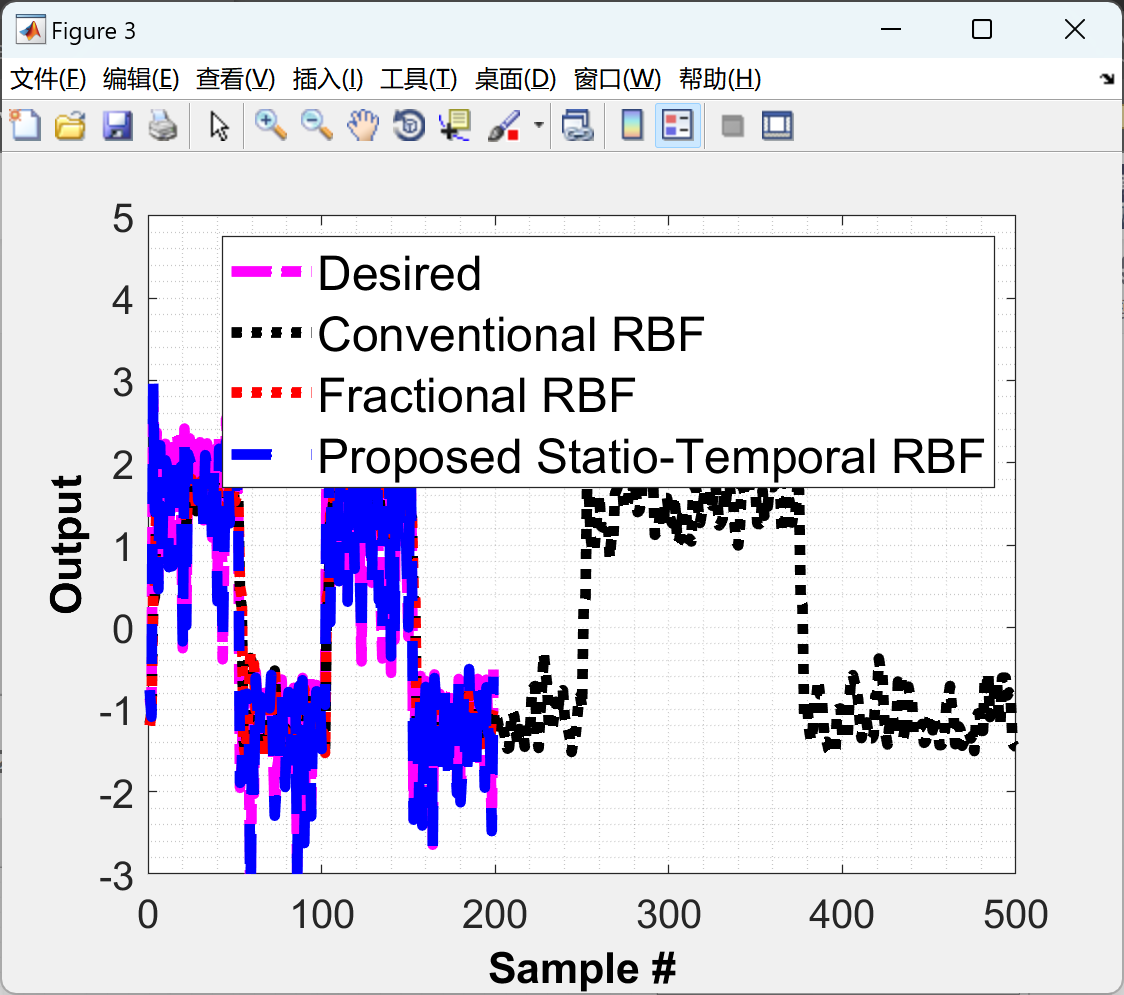
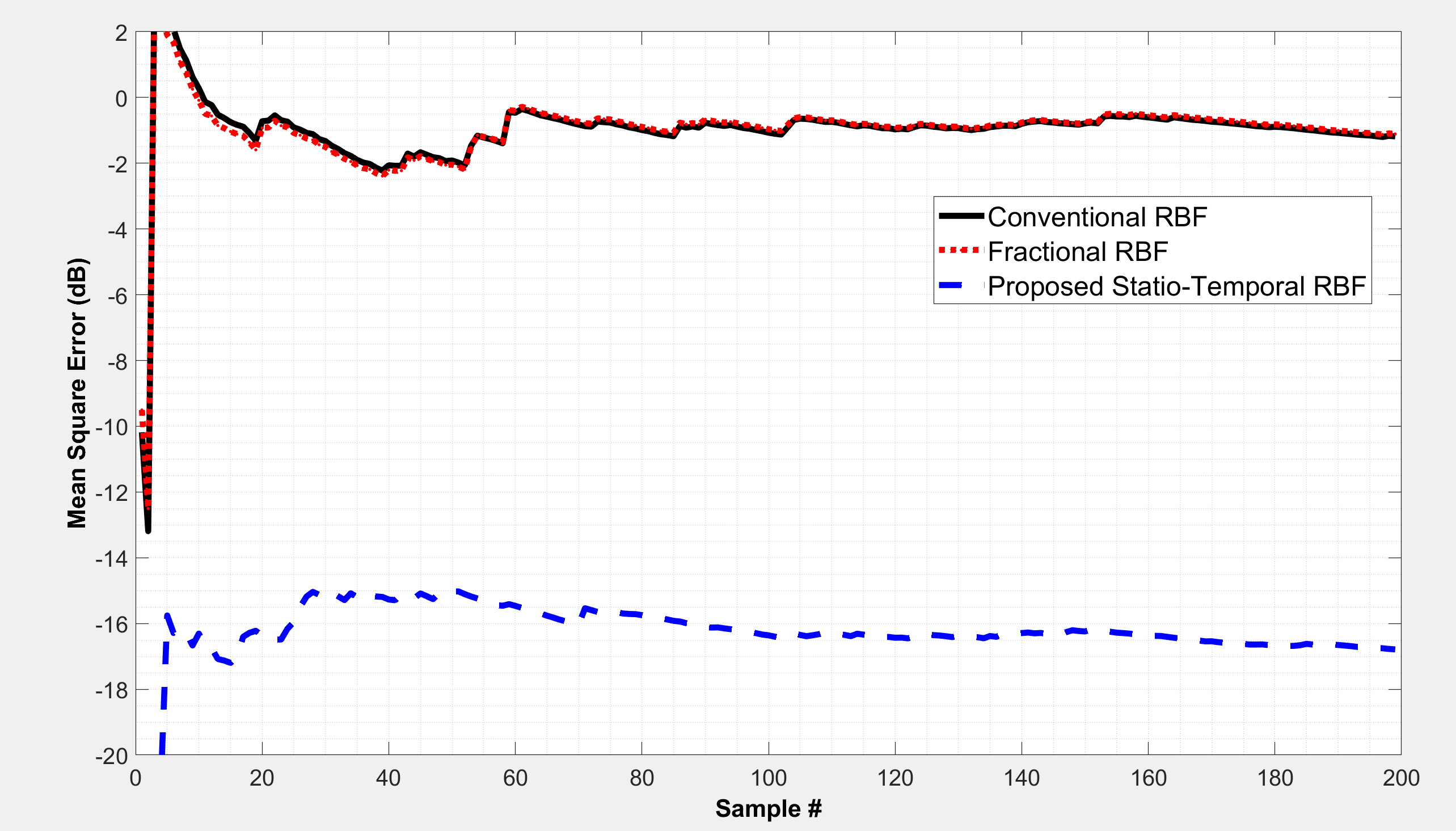
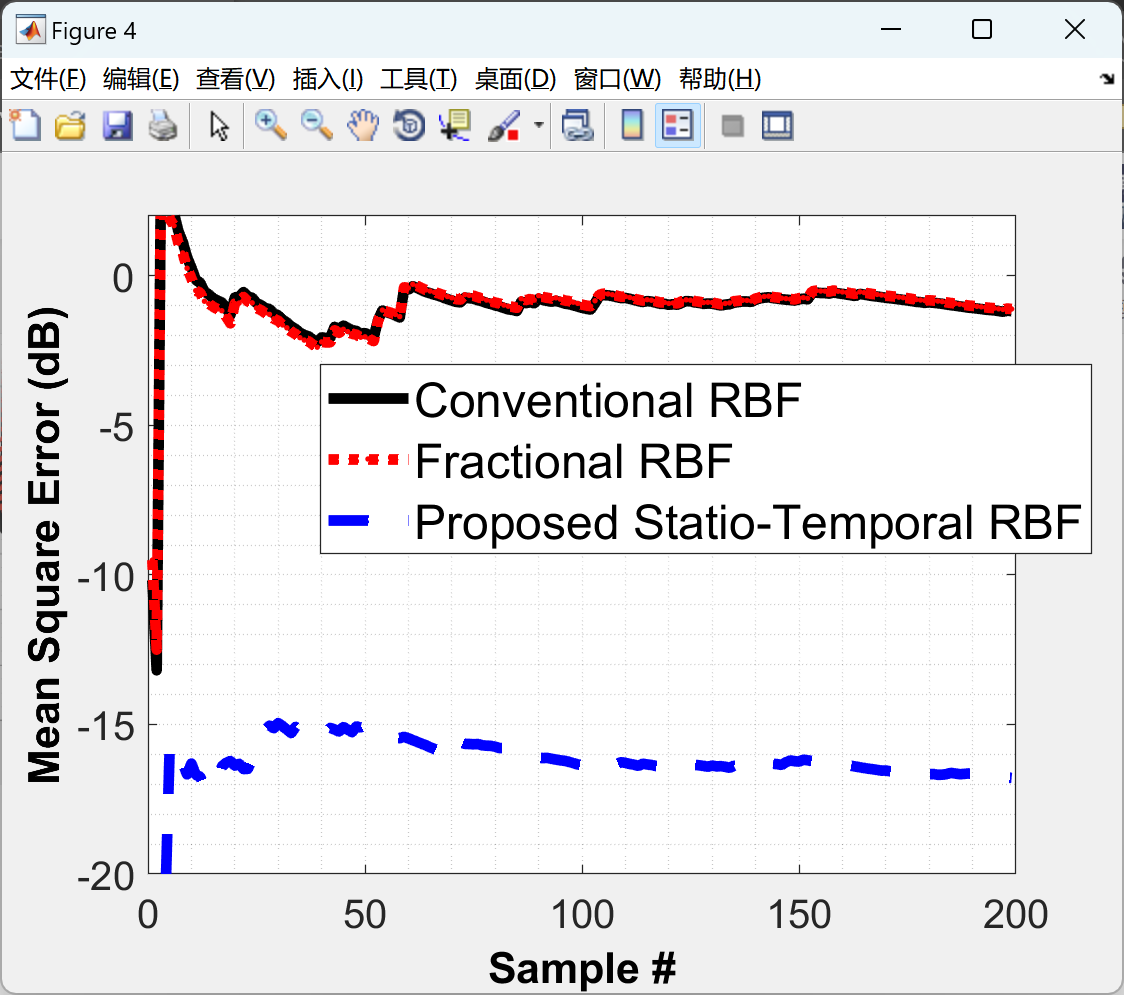
2.2 算例2
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
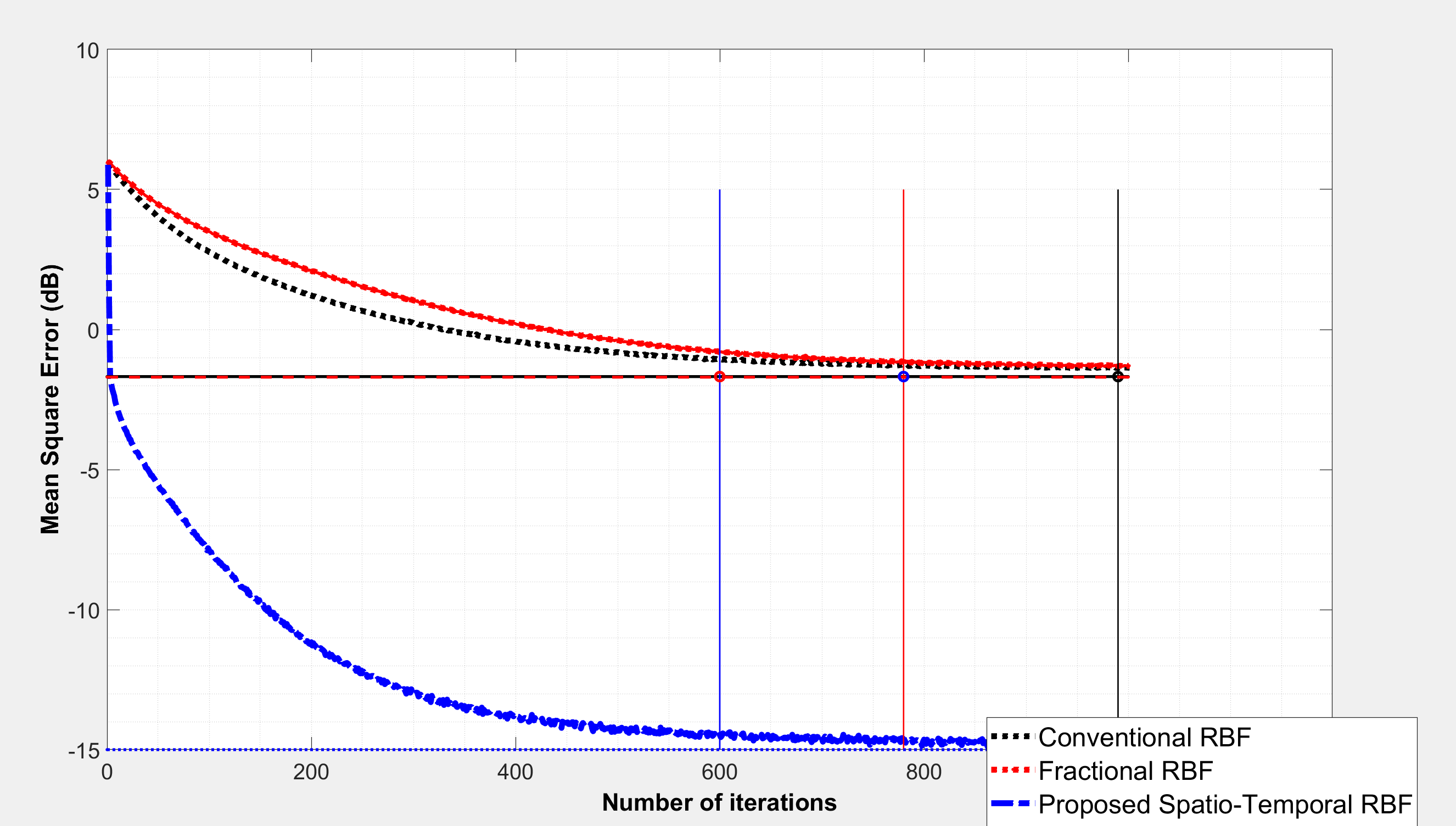
本文用于非线性系统识别任务的径向基函数神经网络(RBF-NN)的三种变体。特别是,我实现了具有常规和分数梯度下降的RBF,并将性能与时空RBF-NN进行了比较。
时空RBF-NN(Radial Basis Function Neural Network)是一种用于非线性系统识别的方法,它将RBF神经网络与时空数据建模相结合。由于非线性系统的行为通常涉及时空关系,时空RBF-NN能够更好地捕捉系统动态,并用于模型识别和预测。
实现时空RBF-NN进行非线性系统识别的基本步骤如下:
1. 数据采集:收集非线性系统的时空数据,包括系统的输入和输出。这些数据用于构建和训练时空RBF-NN模型。
2. RBF神经网络:构建RBF神经网络作为时空RBF-NN的基本模块。RBF神经网络使用径向基函数作为其激活函数,可以通过调整基函数的参数来适应不同的数据模式和非线性关系。
3. 分数RBF:对于具有长期记忆依赖关系的系统,可以考虑使用分数RBF。分数RBF可以捕捉到时间序列中的长期依赖现象,从而提高系统的建模和预测能力。
4. 时空数据建模:将时空数据建模为时空RBF-NN模型。在模型中,输入向量包含过去时刻的输入值和输出值,以捕获系统的历史信息。输出向量则是当前时刻的输出值。
5. 模型训练:使用收集到的时空数据对时空RBF-NN模型进行训练。通过调整模型的参数和基函数的参数,使模型能够更好地拟合和预测系统的动态特性。
6. 模型评估与预测:对训练好的时空RBF-NN模型进行评估。使用测试数据对模型进行验证,并分析模型的预测性能和适应性。
通过实现RBF、分数RBF和时空RBF神经网络,并应用于非线性系统识别研究,可以更好地理解和预测复杂系统的行为。然而,具体的实现细节和参数设置可能因系统的特点和研究目的而有所不同,需要根据具体情况进行调整和优化。
📚2 运行结果
2.1 算例1
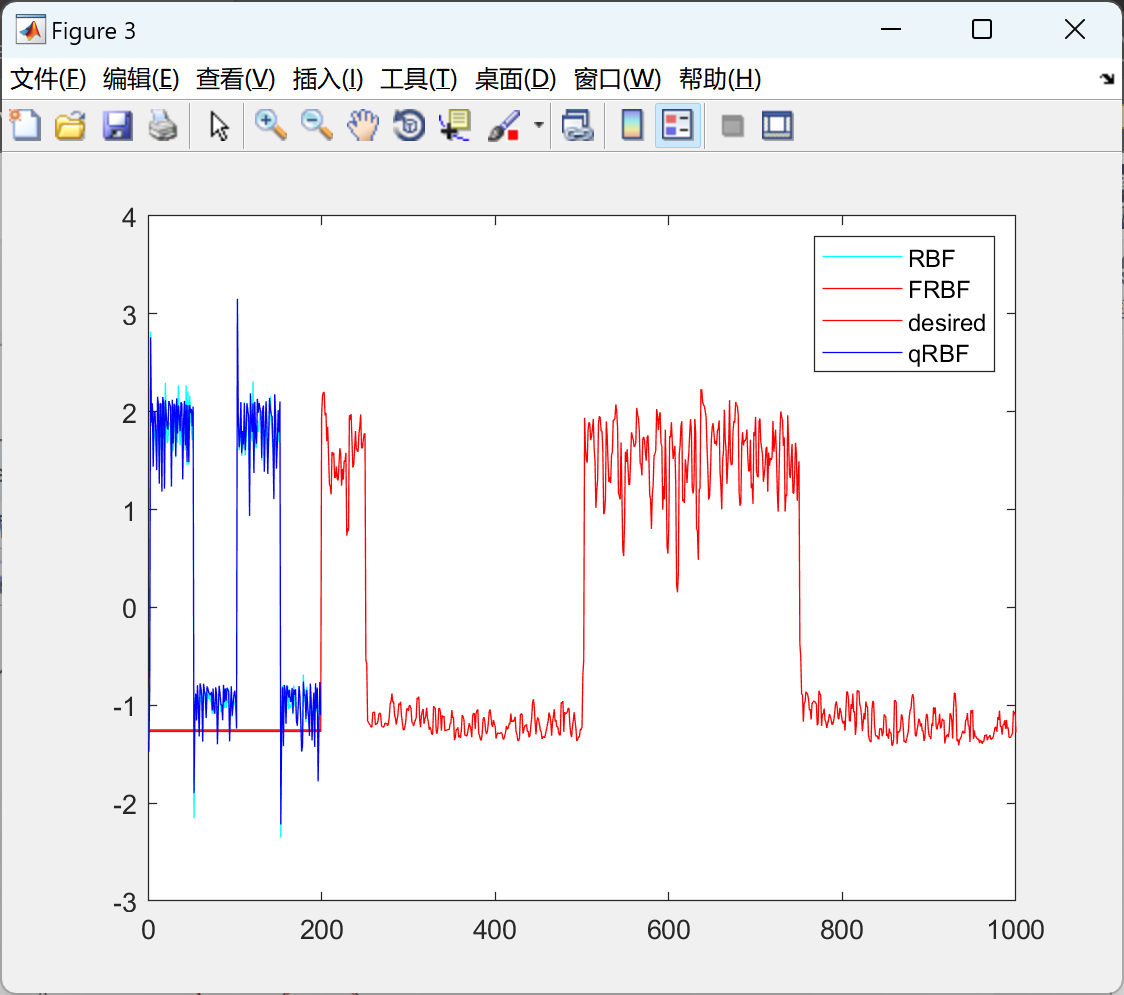
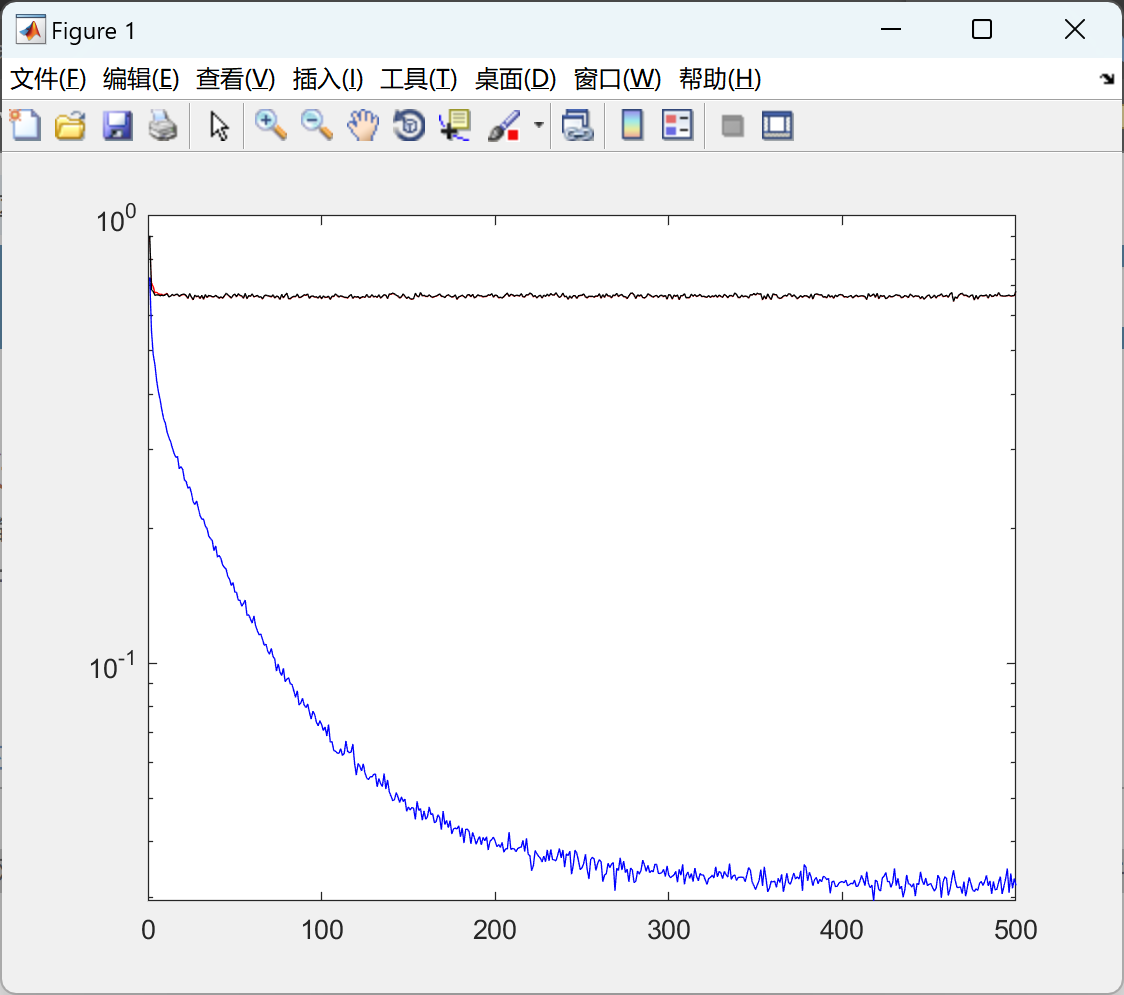
2.2 算例2


部分代码:
meu_c = 1e-2;% Step size
meu_st = 1e-2;% Step size
meu_f = 1e-2;% Step size
len = 1000; % Length of the signal
runs = 500; % Number of times signal passes through ADF for weight adaptation
x=[ones(1,round(len/4)) -ones(1,round(len/4)) ones(1,round(len/4)) -ones(1,round(len/4))];
x=awgn(x,10);
%% Defining Unknown System
h = [2 -0.5 -0.1 -0.7 3];
c = [-5:2:5];
n1=length(c);
W_c = randn(1,n1); % Weights
W_f = randn(1,n1); % Weights
W_st = randn(3,n1); % Weights
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]han, Shujaat, et al. “A Novel Adaptive Kernel for the RBF Neural Networks.” Circuits, Systems, and Signal Processing, vol. 36, no. 4, Springer Nature, July 2016, pp. 1639–53, doi:10.1007/s00034-016-0375-7.
[2]Khan, Shujaat, et al. “A Fractional Gradient Descent-Based RBF Neural Network.” Circuits, Systems, and Signal Processing, vol. 37, no. 12, Springer Nature America, Inc, May 2018, pp. 5311–32, doi:10.1007/s00034-018-0835-3.
[3]Khan, Shujaat, et al. “Spatio-Temporal RBF Neural Networks.” 2018 3rd {IEEE} International Conference on Emerging Trends in Engineering, Sciences and Technology ({ICEEST}), {IEEE}, 2018