pcdet/datasets/augmentor/data_augmentor.py
def gt_sampling(self, config=None):db_sampler = database_sampler.DataBaseSampler(root_path=self.root_path,sampler_cfg=config,class_names=self.class_names,logger=self.logger)return db_sampler
此函数指向DataBaseSampler类,单步调试运行到__call__函数
def __call__(self, data_dict):"""Args:data_dict:gt_boxes: (N, 7 + C) [x, y, z, dx, dy, dz, heading, ...]Returns:"""gt_boxes = data_dict['gt_boxes']gt_names = data_dict['gt_names'].astype(str)existed_boxes = gt_boxestotal_valid_sampled_dict = []sampled_mv_height = []sampled_gt_boxes2d = []for class_name, sample_group in self.sample_groups.items():if self.limit_whole_scene:num_gt = np.sum(class_name == gt_names)sample_group['sample_num'] = str(int(self.sample_class_num[class_name]) - num_gt)if int(sample_group['sample_num']) > 0:#取15个groud truth标签sampled_dict = self.sample_with_fixed_number(class_name, sample_group)# 求出框的坐标信息sampled_boxes = np.stack([x['box3d_lidar'] for x in sampled_dict], axis=0).astype(np.float32)assert not self.sampler_cfg.get('DATABASE_WITH_FAKELIDAR', False), 'Please use latest codes to generate GT_DATABASE'# 碰撞检测#iou1针对的是当前样本里的groud truth与从实例库中采样得到的groud truth进行iou计算,iou如果不为0,则两个发生碰撞(现实情况不可能发生)iou1 = iou3d_nms_utils.boxes_bev_iou_cpu(sampled_boxes[:, 0:7], existed_boxes[:, 0:7])#iou2针对的是实例库中采样得到的groud truth彼此之间进行iou计算,iou如果不为0,则两个发生碰撞(现实情况不可能发生)iou2 = iou3d_nms_utils.boxes_bev_iou_cpu(sampled_boxes[:, 0:7], sampled_boxes[:, 0:7])iou2[range(sampled_boxes.shape[0]), range(sampled_boxes.shape[0])] = 0iou1 = iou1 if iou1.shape[1] > 0 else iou2#将iou1和iou2中值为0的标记为ture,满足现实情况valid_mask = ((iou1.max(axis=1) + iou2.max(axis=1)) == 0)if self.img_aug_type is not None:sampled_boxes2d, mv_height, valid_mask = self.sample_gt_boxes_2d(data_dict, sampled_boxes, valid_mask)sampled_gt_boxes2d.append(sampled_boxes2d)if mv_height is not None:sampled_mv_height.append(mv_height)valid_mask = valid_mask.nonzero()[0]valid_sampled_dict = [sampled_dict[x] for x in valid_mask]valid_sampled_boxes = sampled_boxes[valid_mask]existed_boxes = np.concatenate((existed_boxes, valid_sampled_boxes[:, :existed_boxes.shape[-1]]), axis=0)total_valid_sampled_dict.extend(valid_sampled_dict)sampled_gt_boxes = existed_boxes[gt_boxes.shape[0]:, :]if total_valid_sampled_dict.__len__() > 0:sampled_gt_boxes2d = np.concatenate(sampled_gt_boxes2d, axis=0) if len(sampled_gt_boxes2d) > 0 else Nonesampled_mv_height = np.concatenate(sampled_mv_height, axis=0) if len(sampled_mv_height) > 0 else None'''将采样的groud truth标签中的点云数据添加到当前样本点云场景中去sampled_gt_boxes采样的groud truth的坐标、大小、偏移角total_valid_sampled_dict采样的groud truth,包括其内部的点云数据存储位置,点云数目,bbox,即包括sampled_gt_boxes'''data_dict = self.add_sampled_boxes_to_scene(data_dict, sampled_gt_boxes, total_valid_sampled_dict, sampled_mv_height, sampled_gt_boxes2d)data_dict.pop('gt_boxes_mask')return data_dict
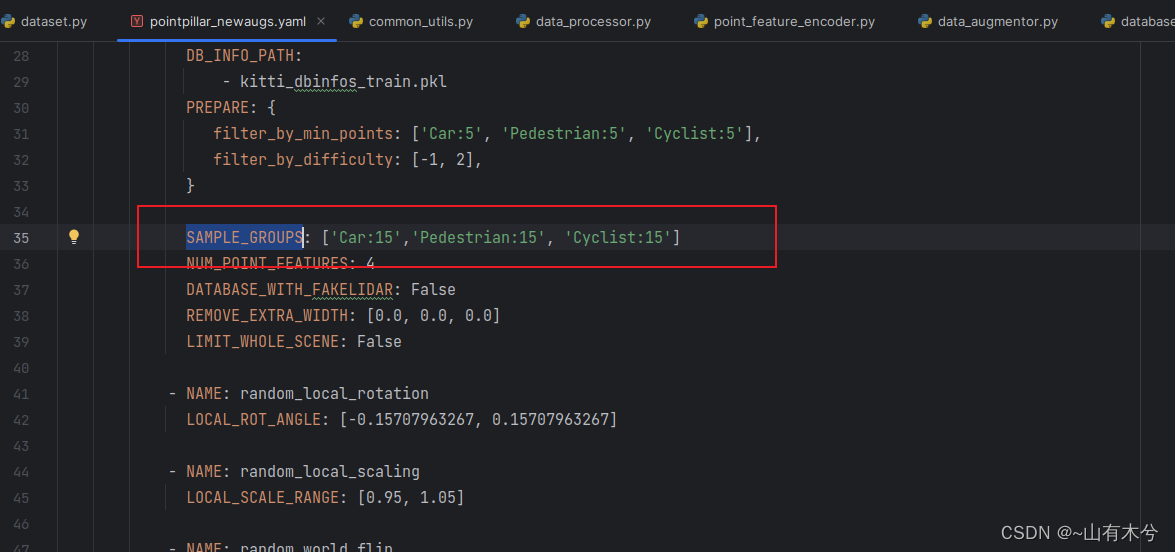
关于采样多少个实例库中的groud truth标签,在配置文件中设置
通过函数sample_with_fixed_number采样实例库中的标签
def sample_with_fixed_number(self, class_name, sample_group):"""Args:class_name:sample_group:Returns:"""sample_num, pointer, indices = int(sample_group['sample_num']), sample_group['pointer'], sample_group['indices']# 初次运行将pointer设置为0,索引随机打乱if pointer >= len(self.db_infos[class_name]):indices = np.random.permutation(len(self.db_infos[class_name]))pointer = 0#按照打乱后的索引顺序取sample_num个数,这里的sample_num设置为15sampled_dict = [self.db_infos[class_name][idx] for idx in indices[pointer: pointer + sample_num]]pointer += sample_numsample_group['pointer'] = pointersample_group['indices'] = indicesreturn sampled_dict
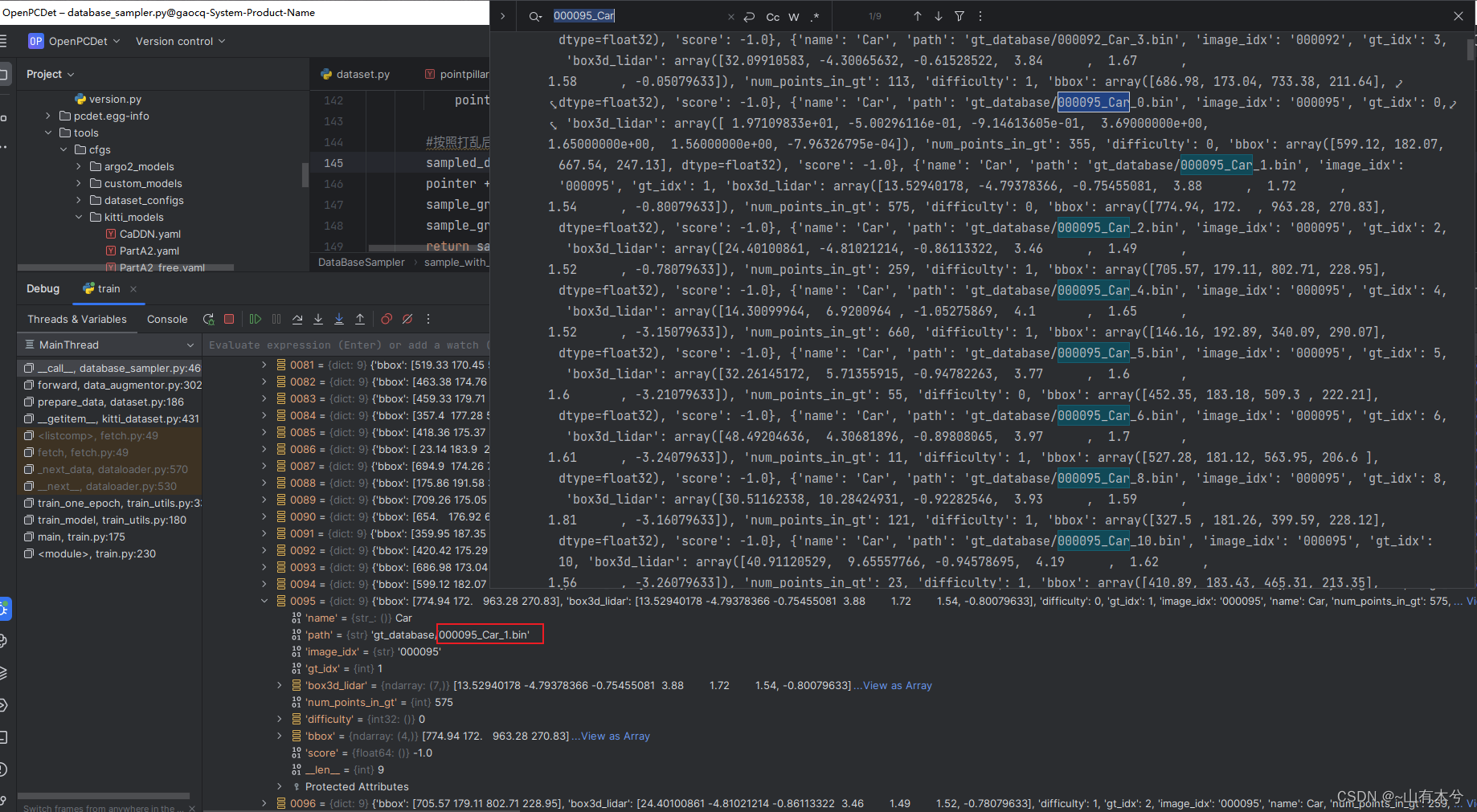
注意:OpenPcDet的实例库在self.db_infos下

这里以car类为例,每一个dict内存储了一个groud truth标签,一张图片可能有多个标签,也可能只有一个(可能没有吗?)
从实例库中取出15个groud truth标签后,就可以进行碰撞检测了

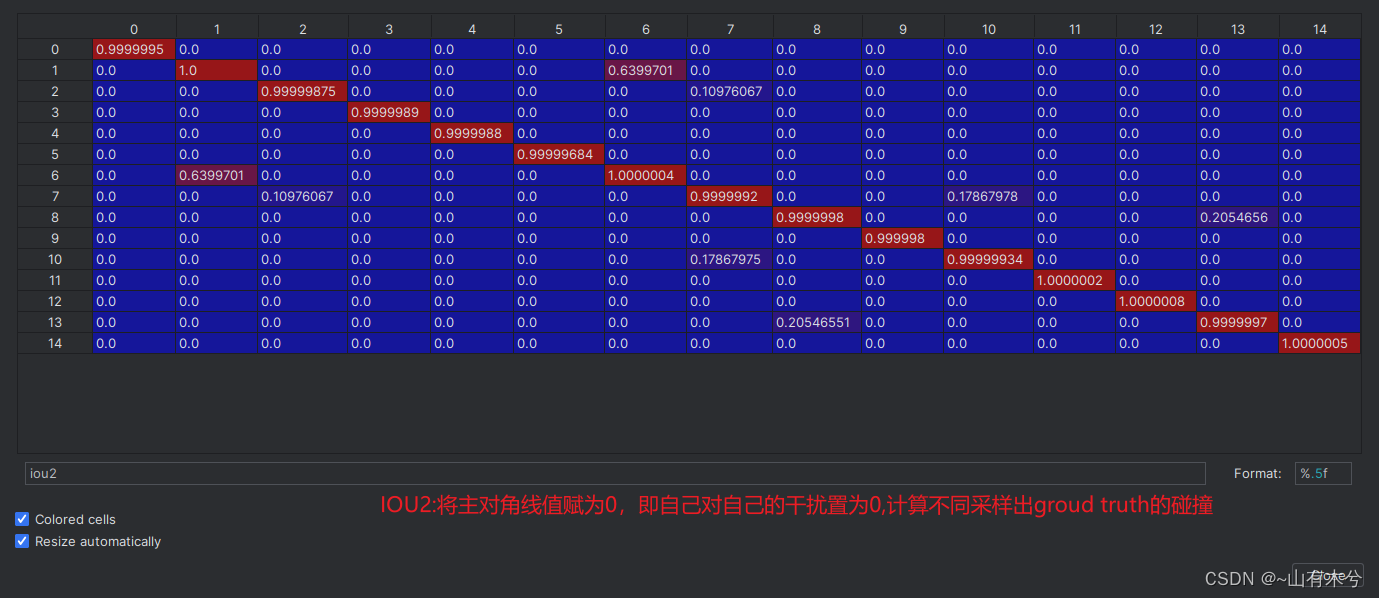
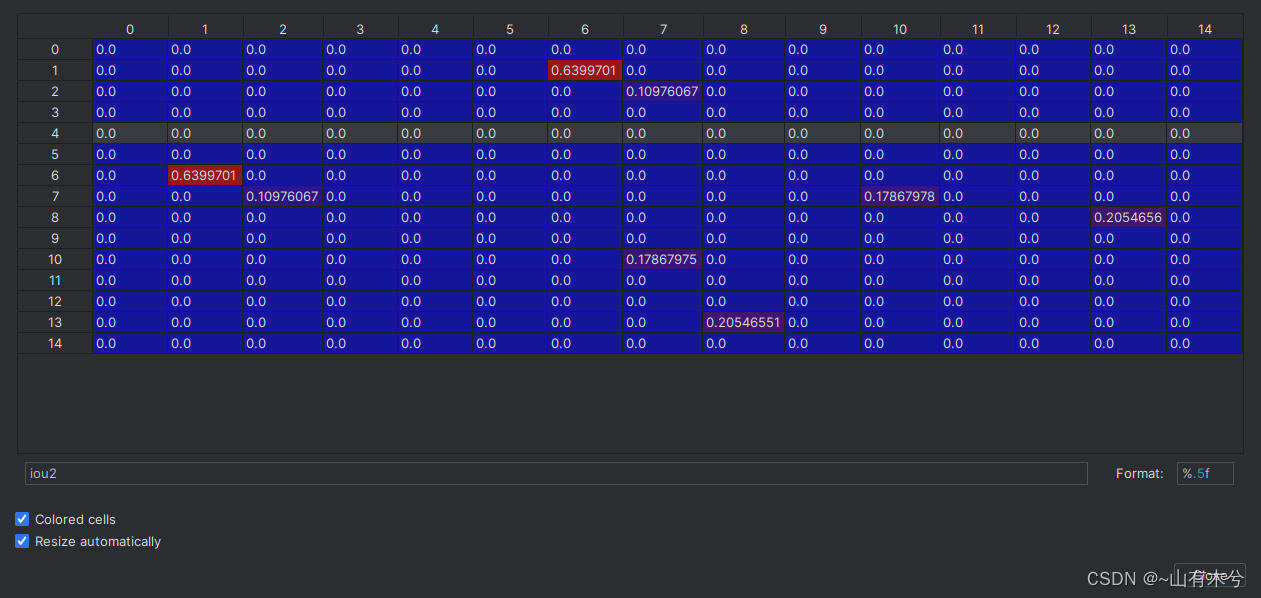
有效采样标签掩码(发生碰撞无效)
valid_mask = ((iou1.max(axis=1) + iou2.max(axis=1)) == 0)
将有效标签数据和当前样本的groud truth标签数据拼接则已完成了数据增强

)

















漏洞)